英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
在过程均值中探测小偏移的合成控制图
ZHANGWU,TREVOR A.SPEDDING
南洋科技大学,新加坡639798
本文提出了一个由传统休哈特控制图和合格品链长控制图所结合而成的合成控制图。和休哈特控制图一样,合成控制图的用处是来探测均值的偏移。我们从大量的研究中发现,当虚报警报率保持在一个具体的值时,相比于任何大小的的休哈特控制图(无论有无带链规则),合成控制图可以一直产生更小的失控平均运行长度。和休哈特控制图相比,当偏移比较微小时(和)合成控制图可以减少失控平均运行长度近一半的长度。当大于0.8时,合成控制图也比指数加权移动平均(EWMA)控制图和EWMA-X组合的控制图表现要好。
介绍
休哈特控制图已经被广泛用于工业生产中监督过程均值。休哈特控制图能有效地探测均值较大范围的偏移,但对于探测均值微小偏移的情况并不敏感。
一些学者已经研究了最早由罗伯特(1959)提出的指数加权移动平均值的控制图的特征。控制图的最优设计标准是当时由Crowder、Lucas和Saccucci提出的平均运行长度(ARL)。Lucas和Saccucci同时也将EWMA和CUSUM控制图作了比较,得出两者在实际运用上差别不大的结论,但相比于休哈特控制图,EWMA和CUSUM在探测微小均值偏移的情形下表现得更好,但在探测较大的均值偏移时,效果均不如后者。Albin.kang和Shea早年间提出了结合X-EWMA的方式,在当时过程失控的标准是以X样本均值超出了休哈特控制图的控制线,或者统计样本的值Z超出了EWMA的控制线为代表。X-EWMA合成控制图以削弱探测微小偏移的灵敏度为代价提升了探测较大均值偏移的灵敏度。
一些补充性的运行规则在一些时候提升了休哈特控制图的性能。例如,如果利用了3-2运行规则的话,当样本均值超过控制线或连续三个数值由两个超过了的警戒线时,这个过程就会被认为是失控的。Champ、Woodall和Nelson早年研究就表明了带有补充性规则的休哈特控制图比单独的休哈特控制图在探测微小均值偏移时具有更高的敏感度,但表现上还是不如CUSUM控制图。Albin.kang和Shea曾经比较了X-EWMA合成控制图、带有补充性规则的休哈特控制图和未带有补充性规则的休哈特控制图的表现,他们建议除了需要探测标准差中微小的变化,尽量使用X-EWMA合成控制图。Ncube提出了一种在指数加权样本均值的基础上形成的休哈特累计过程控制图的方法,他表明这个控制过程通常优于休哈特控制图。Shamma提出了一种在微小均值偏移探测上优于休哈特控制图的双变量EWMA控制图。同时,它最优化的表现在参数选择上没有标准EWMA敏感。
用控制线内的均值,表明过程从到plusmn;的偏移所需的平均样本数量,ARL被广泛用于评估控制图的能力。ARL可以用监测能力来进行计算:
(1)
表示第二类错误概率,n表示样本容量,K表示控制限常数,受控ARL,ARL(0)通常根据用户所要求的虚假警报率来制定。
合格品链长控制图
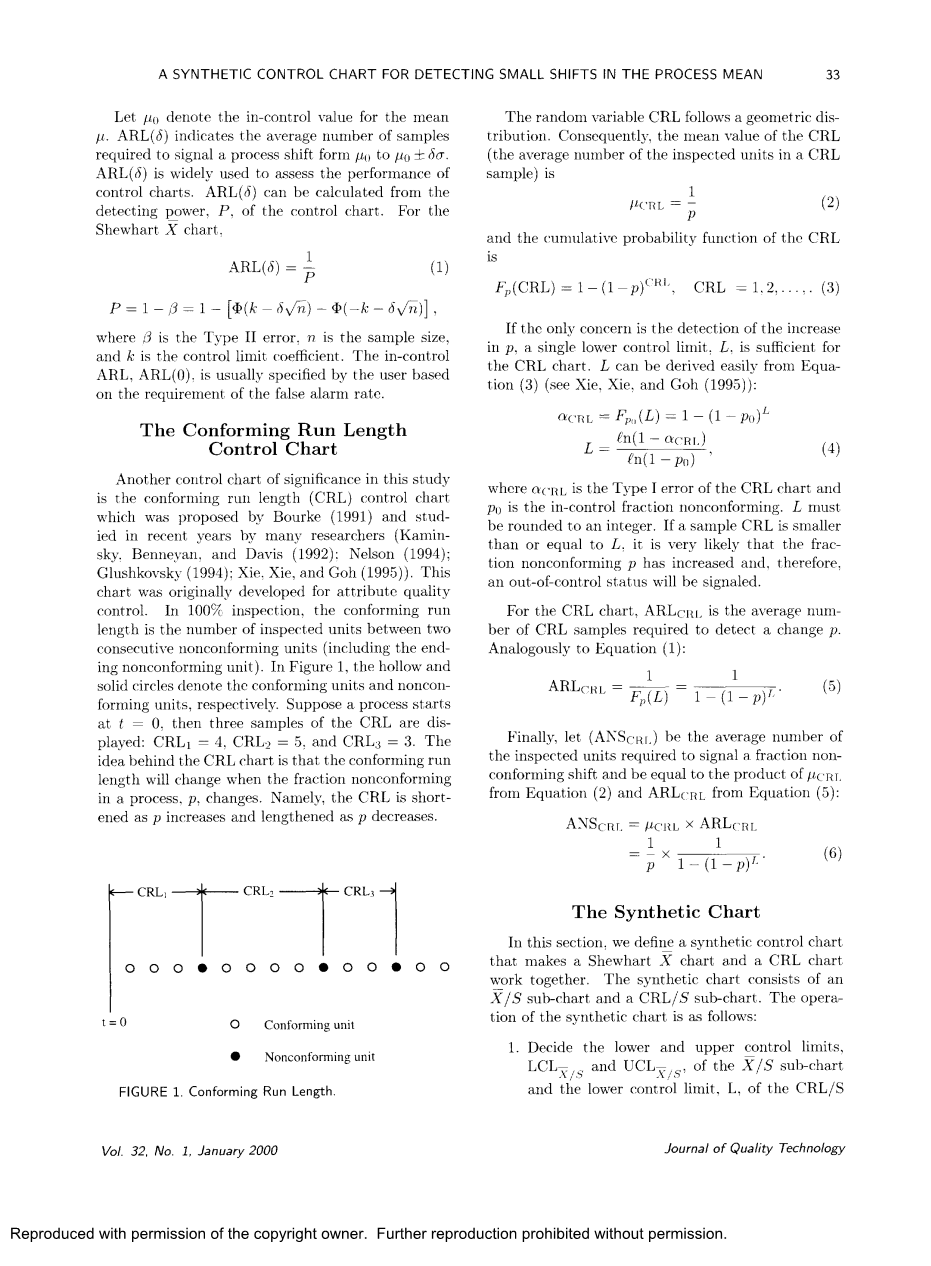
在这项研究中,另外一个很重要的控制图就是Bourke提出的,在近几年被大量的专家学者研究的CRL控制图。CRL控制图最初在质量控制中发展起来。在100%的检验中,合格品链长是指两个连续非相容单位之间的长度(包括两个非相容的节点)。在图1中,空心圆表示相容单位,实心圆表示非相容单位。假设这个过程从t=0开始, CRL的样本如图所示:,,,但合格品链长会随着非相容部分P的变化而变化。也就是说, CRL会随着P的增多而减少,P的减少而增多。
图1.相容运行链长
随机变量CRL服从几何分布。因此,CRL的均值是:
(2)
CRL的累计概率函数为: (3)
如果探测的仅仅是P的上升个数,那么CRL仅仅需要单独的控制下限就足够了。L可以很容易从(3)式推导出来:
(4)
表示第一类错误的概率,是指受控内非相容的部分,L必须在整数周围,如果CRL样本小于等于L,很有可能非相容部分P的数量上升,从而显现出失控的部分。
对于CRL控制图,它的ARL(平均运行长度)是指监测到一个P的平均CRL样本数量。类比于公式(1):
(5)
最终,用来表示监测非相容部分的变化所需的平均长度,同样等于(2)和(5)相乘的结果: (6)
合成控制图
在这个部分,我们讲休哈特控制图和CRL控制图组合起来命名为合成控制图。合成控制图包括了子图和子图。合成控制图的运行如下:
1.确定的 、以及的控制下限, 、可以用休哈特的方法得到:,
(7)
是指受控下的过程均值,是指样本均值的标准差,子图的控制限常数K通常比对应的休哈特控制图中的K值略小。
2.在每一个检测的部分都取随机的n个样本观测值,并计算样本均值,。
3.如果处于子图的,控制限之间,那么样本则是相容样本,控制流则返回到步骤(2),否则,样本是非相容样本,控制流前进到下个步骤。
- 检查出现在和上一次非相容样本之间样本的个数。这个数会被作为合成控制图中子图中一个样本值。
- 如果样本值大于子图的控制下限,那么这个过程可以被认为处于受控状态,控制流返回到步骤(2),否则过程失控,控制流转向下个步骤。
- 标记失控状态。
- 发现失控根源,并采取措施进行解决,然后转向步骤(2)。
大致说来,合成控制图和原始的的工作方式一样,除了在合成图中需要用样本值代替中的每个单位。
很明显,不像休哈特控制图,合成控制图中子图的样本均值超出控制限并不立刻代表失控状态。相反,它只是标记了一个非相容的样本。只有当连续两个非相容样本之间的数目小于等于子图的控制下限才表示失控。
在合成控制图中,表示探测出偏移所需的平均样本个数,其本质上等于(6)中的,不过必须当(6)中的非相容部分(P)被合成控制图的子图探测能力(P)所取代。这个因为在合成控制图中的样本对应控制图的相应单位。
把图1想象成合成控制图,每个圆圈代表一个样本而不是一个单位,可以更容易理解这一点。因此,空心圆和实心圆分别代表相容和不相容的样本。在属性图中,非相容部分P所出现的概率等于非相容部分发生频率。在合成控制图中,非相容样本发生频率会替代这个概率,也是一个样本落入超出子图控制线以及子图的探测能力的概率。因此通过参考(6)式 (8)
子图的探测能力P可以用(1)计算子图的探测能力P可以用(1)式计算。由于无论是均值正偏移还是负偏移都会造成P值量的增加,所以只讨论正向偏移。因此,由于P不会下降,子图只需要一个控制下限。最后,两个特别的值需要更多讨论:
1.
称为设计偏移,被认为是能够损害产品质量足够大的强度。因此,一定要尽快监测出并除掉它。
2.
如果,那么利用等式(8),
(9)
|
|
|
|
|
1 |
1.944 |
3.676 |
|
2 |
2.088 |
3.002 |
|
3 |
2.164 |
2.798 |
|
4 |
2.218 |
2.734 |
|
5 |
2.263 |
2.737 |
|
6 |
2.295 |
2.746 |
|
7 |
2.322 |
2.773 |
|
8 |
2.349 |
2.819 |
|
9 |
2.367 |
2.848 |
|
10 |
2.385 |
2.887 |
表1:不用K和L值的组合
(9)式能够确定合成控制中不同的参数K和L的取值。如果是使用人员指定的值,那么任何K和L的组合满足(9)式都可以是合成控制图满足和虚报概率。
表1赋予了10个K和L的不同组合值,在,的前提。L的值从1升到10,相应的K值可以通过 (9) 计算出来。在10组K合L的值中,他们都是(9)式的解,因而得到总是特定的。然而,从表1可以看出,不同的组合可以得出不同的值,L=4时,K=2.218时,到达了最低值2.734,所以L=4和K=2.218代表合成控制图的最终设计。
表1其实阐述了单峰的优化问题,其目标函数是得到的最小值。 (9)式是的约束条件等式。唯一的独立变量是L。设计变量K是用(9)约束等式得到的关于L的函数。最优解可以利用不断提高L从1开始的取值而得到。因为目标函数是单峰的,当的值不再下降是即可停止对最优解的搜寻。关于设计合成控制图普遍的观点是通过认定一组的K和L,当的条件满足时,值最小。事实上,大量研究表明,就L而言合成控制图的表现十分优异。就表1说,L去3和10之间的任何值,最后的合成控制图效能都能和最优设计的一样,始终比X休哈特控制图表现的要好。
整个合成控制图的设计过程总结如下:
- 阐明,,,和。
- 设定L最初值为1。
- 通过计算等式(9)得到K。
- 计算利用等式(9)和现有的K和L值计算。
- 如果的值上升了,L加1并返回到步骤3
- 得到最新的K和L的值作为合成控制图最优解。
- 利用等式(7)从最终的K值中计算子图的、。
这个部分所用的推导等式已经通过蒙特卡罗模拟方法验证。
例一
在这个例子中,实施的是类似于阶乘设计的实验。由三个不同水平,有五个不同水平,所以他们可以组合出15种不同的结果。
:200,370,500
:0.5,1.0,1.5,2.0,2.1
将n固定为4,和的值则不指定具体值,因为他们对没有影响。
对于每一个和的结合,其对应的合成控制图和休哈特控制图可以通过前述的步骤得到。然后,通过13个不同的偏移值计算出不同的和,当过程处于受控状态时。这样保证了在任意控制图中对探测能力可以进行公平而有意义的对比。许多有趣的发现都源于这个实验:
- 当时,总是比小一点,这代表合成控制图在探测任何大小的偏移上都比休哈特控制图快。尽管在事实上,合成控制图的最优设计是建立在单一设计均值偏移上面。对其他偏移均值的值,探测能力的提升已经成功实现。
- 在许多案例中,提升探测能力非常重要。特别是当均值偏移在到之间,只有的一半。
- 当的值很大时,探测能力的提升就会非常明显。在解决虚假警报所造成的时间和成本的浪费就会用到。
- 当均值中的设计偏移大于等于,合成控制图就固定下来了,也就是说,在大过某一特定值后,无论是K还是L都会随着的增加而改变。
- 相比于休哈特控制图,合成控制图的优越性会随着较大偏移而减弱,这是因为探测较大偏移非常的简单,即使对于休哈特控制图来说也是同样的。
例二
假设控制图可以检测质量特征值的均值X。这时假设X近似服从正态分布,已知均值,已知方差,n=4。考虑到虚报警报和伴随着的休哈特控制图一样,受控状态下制定等于370,那么我们希望尽快探测到方差在的均值偏移,因此将设定为1。
图2展现了以下五个控制图的ARL和均值的曲线:
- 合成控制图
- 休哈特控制图
- 带链规则休哈特控制图
- 控制图
- 控制图
所在的水平轴的区域是最重要的到2.0,控制线做了轻微的调整,所有控制图的的值都等于指定的370。相比较而言,EWMA和控制图所选取的较为普遍的范围会导致最小化。
图2表现了合成控制图下的总是比无论有没有伴随补充规则的休哈
特控制图下。同时也可以看到,当时。合成控制图的表现比控制图和控制图要好。
图2:不同的控制图 ARL和均值偏移之间的关系
具体来说,当时,
合成控制图比其他的控制图更高效。从图2中还可以发现比较小时,合成控制图的表现没有控制图和控制图敏感。这可能并不是
合成控制图的缺陷,因为从实际出发,对于微小均值偏移的过分敏感。这种情况最好的办法还是不要处理,而当控制图的表现就没有休哈特控制图好了。
例三 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141916],资料为PDF文档或Word文档,PDF文档可免费转换为Word

