
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
在准静态荷载模式下斜拉桥
的主动控制行为
Miquel Crusells-Gironaa,Aacute;ngel C.Apariciob
目录
摘要 1
摘要
以下论文将涉及斜拉桥的主动控制行为,斜拉桥结构主动控制的最新进展集中在动态适应性上地震或极端风造成的影响(El Ouni等,2012; Pakos和Woacute;jcicki,2014年;Domaneschi等,2015a,b)然而,没有注意静态或准静态情况。如Housner等人所述 (1996),Song et al。 (2006)或Gilewski和Al Sabouni-Zawadzka(2015),主动控制也可能有助于减少这种类型的桥在应力逐渐降低的情况下的长期疲劳表现。实际上,下面的文章表明,这种桥梁的交通负荷和自然振动周期彼此相距甚远,从而得出可以进行准静态分析的结论。为了填补这个差距,下面论文将提出结构分析程序,其包含了在斜拉桥设计过程中的主动控制系统,以及为了使这种情况被考虑的相关建议。因此,可以肯定地补偿准静态加载模式的主动控制系统帮助工程师优化这些象征性结构的设计。
1.简介
斜拉桥,自20世纪70年代以来一直用于跨径较大的桥梁,近年来在桥梁领域受到越来越多的重视。Virlogeux[36]显示了这种桥梁在20世纪下半叶的快速发展。斜拉桥是一种用斜拉索将主梁支撑并连接起来,而主梁固定于对应桥台的桥梁形式。这些桥梁尺寸和几何的优化以由Simotilde;es和Negratilde;o进行了彻底的分析,除了这些常规的设计,在一些奇特的斜拉桥设计中也可以找到,比如阿拉米略桥。在这些情况下,桥塔倾斜可以弥补结构斜拉索的部分拉力。此外,在20世纪初还提出了更多现代领先的设计,如独塔斜拉桥和多塔斜拉桥。
主动控制结构反应的想法是首先由Kobori和Minai提出的,并在20世纪80年代的工程中被使用。在历史的长河中,当斜拉桥开始在较大跨径的工程中使用时,斜拉桥的主动控制改变了桥梁抗震和抗风的性能。一些理论性和实验性的研究被迅速地提出。在21世纪初,更多现代化的仪器和理论的出现使斜拉桥的主动性更加有意义。在最近几年,研究人员一直在使用详细的桥梁模型在相同的动力反应下的主动控制作用,尽管如此,在静态和准静态分析上并没有引起更多关注。作为这个问题的全新方法,作者提出使用主动控制也具有准静态加载模式,并且与Housner等人的古典观念进行融合。伴随着Gilewski和Al Sabouni-Zawadzka的现代理论的逐渐兴起。
根据下列所述的研究,有一点可以看出,对于交通荷载和斜拉桥而言,励磁周期和自然振动周期彼此相差很远,因此动态刺激显得无关紧要。作为结果而言,本文提出了一种斜拉桥式结构主动控制系统,减轻了应力,使之能适应静态方式。详细算法基于在控制系统中,已经考虑了弯矩补偿相关的细节。最后,本文测试了作者设计的斜拉桥的以前的发展,包括在控制系统使用或存在的地方的两种荷载的分析(非累积和累积)。这些荷载情况的结果表明结构弯矩的分布可以被有效的修改,达到减少25%的不平衡弯矩,这些取决于荷载的情况。
因此,结构主动控制可以在对准静态载荷作出反应中成功应用,其具有显着的不平衡性弯矩降低作用。因为弯矩分布会被自动修改,位移和疲劳破坏都可以减少。
2.一种斜拉桥承受荷载的准静态方法
首先,在斜拉桥的静态、准静态和动态载荷之间形成一个概念关系是很重要的。从理论上说,所有真正的物理结构在承受载荷或位移时都会表现其动态性。只有当这些载荷或位移作用地非常缓慢,不会产生明显的振荡,即惯性力可以是可以被忽视的。在这种情况下,可以进行准静态分析,因为荷载和位移是可以通过荷载和位移准确联系起来的。出现的问题就是在这篇文章中所要慢慢解释的。
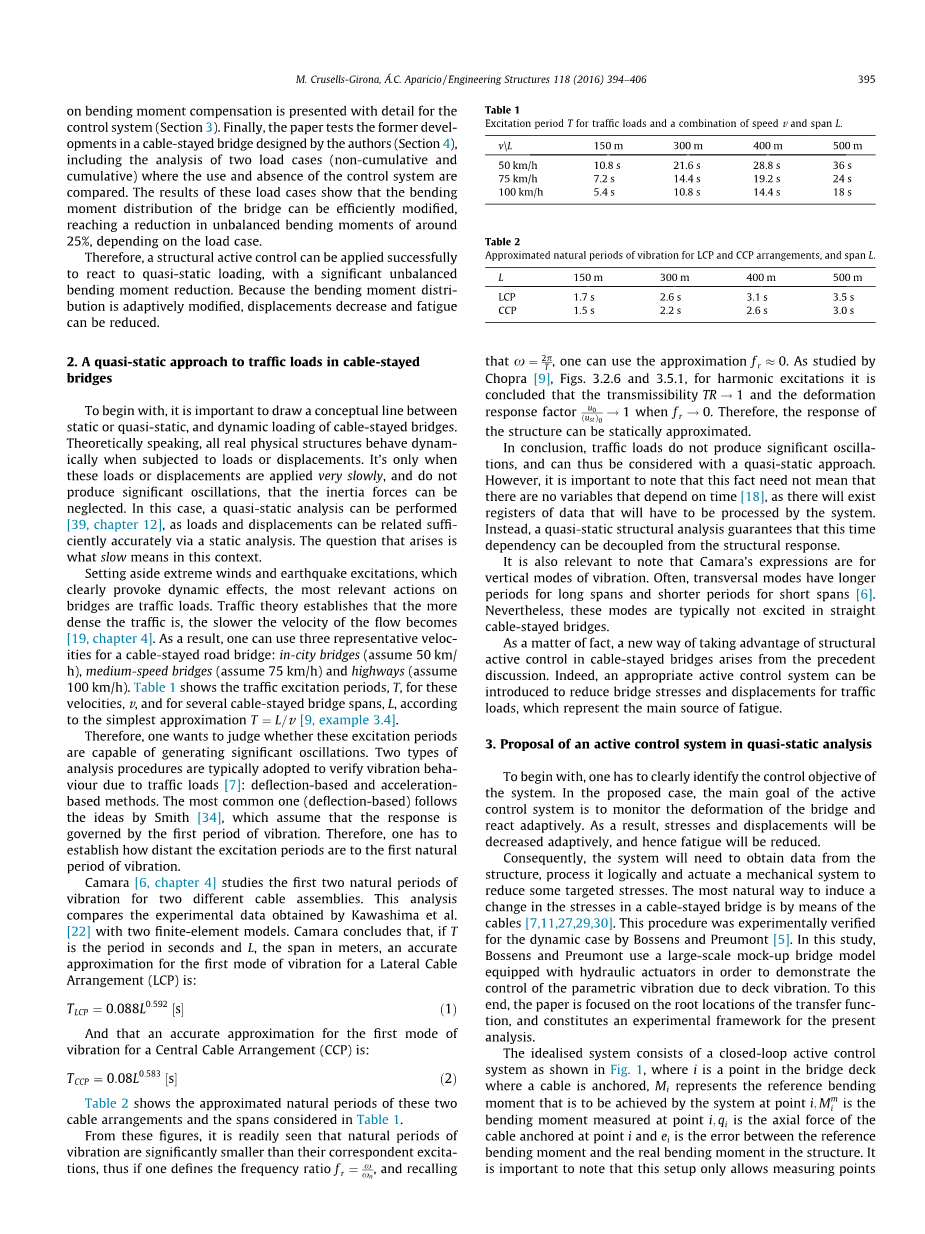
排除极端的风和地震的反应,其中能明显地引起动态结构动态反应的就是桥梁的交通荷载。交通理论认为,流量越密集流速越慢。因此,可以为斜拉桥选择三个代表性的速度——城内桥梁(假设50公里/h),中速桥(假设75公里/小时)和高速公路(假设100公里/小时),表1显示了这些的交通激励周期T,速度v和一些斜拉桥跨距L,根据最简单的近似公式计算[9,例3.4]。
因此,人们想判断这些激发周期是否能够产生显着的振荡激励。通常采用两种类型的分析程序来验证由于交通荷载产生的冲击振动波[7]:基于偏转和基于加速度的方法。最常见的(基于偏转的)是史密斯[34]的想法,它假设“反应”是由第一次振动所控制的。因此必须确定激发周期与第一次自然震动周期的距离。
Camara [6,第4章]研究了两个不同斜拉索组件的前两个自然振动周期。该分析比较了川崎等人获得的实验数据。[22]有两个有限元模型。 Camara认为,如果T周期是以秒为单位,L跨度以米为单位,对于横向斜拉索布置(LCP)的第一振动模式的准确近似为:
而中央斜拉索布置(CCP)的第一种振动模式的准确近似为:
表2显示了表1中考虑的这两种斜拉索布置和跨度的近似自然周期。
从这些数据可以看出,自然周期振动明显小于其相应的激励,因此如果定义频率比,并且,可以使用近似值。正如Chopra [9]所研究的,见图 3.2.6和3.5.1。对于谐波激发,可以得出结论,传输率TR→1并且当→0时变形响应因子趋近于1。因此结构反应可以近似相似。
总之,交通荷载不会产生显着的振荡,因此可以用准静态方法来近似考虑。然而,重要的是要注意,这个事实并不意味着这一点没有依赖时间的变量[18],因为会存在必须由系统处理的数据的记录。相反,准静态结构分析保证了这一次依赖性可以与结构响应分离。
还要注意,卡马拉所表达的是为了垂直振动模式。 通常,横向模式对较大跨度有更长的时间,对较小的跨径有更短的时间[6]。然而,这些模式通常不会在斜拉桥。事实上,在斜拉桥上采用结构主动控制的新方式来自于先例。实际上,可以采用适当的主动控制系统来减少交通负载引起的的桥梁应力和位移。
表1 用于交通负载的励磁周期T和速度v及跨度L的组合
|
|
150m |
300m |
400m |
500m |
|
50km/h |
10.8s |
21.6s |
28.8s |
36s |
|
75 km/h |
7.2s |
14.4s |
19.2s |
24s |
|
100 km/h |
5.4s |
10.8s |
14.4s |
18s |
表2 LCP和CCP两种斜拉索布置自然振动周期,跨度L
|
|
150m |
300m |
400m |
500m |
|
|
1.7s |
2.6s |
3.1s |
3.5s |
|
|
1.5s |
2.2s |
2.6s |
3.0s |
3.准静态分析中主动控制系统的建议
首先,必须清楚地确定系统的控制目标。 在提出的情况下,主动控制系统的主要目标是监测桥梁的变形并自适应反应。 因此,应力和位移将自适应地降低,因此疲劳将会降低。
因此,系统将需要从结构中获取数据,逻辑地处理数据,并启动机械系统以减少一些目标应力。引起斜拉桥应力变化的最自然的方式是借助于斜拉索[7,11,27,29,30]。Bossens和Preumont的动力学分析对该程序进行实验性的验证[5]。在本研究中,Bossens和Preumont使用了大型模拟桥模型配备液压执行器,以显示由于桥面板振动引起的参数振动的控制。为此,本文着重于传递函数的根位置,构成了本分析的实验框架。
理想化系统由闭环主动控制系统组成,如图1所示,i点是斜拉桥固定位置桥面板上的一点,表示系统在点i处实现的参考弯矩, 是点i位置测得的弯矩,是锚点在点i处的电缆的轴力,是结构中参考弯矩与实际弯矩之间的误差。重要的是应该注意,此设置方式仅允许测量点位斜拉索锚定到甲板上的位置。这个假设将提供增益计算中的简化,这将在下面的部分中说明。
3.1测量和所获得的弯矩值
尽管直接从结构中测量弯矩是特别困难的,但是存在一组众所周知的装置可以测量位移。由于这个事实,它被选择用于测量m点处的位移。由于测量设备的最新发展,将使用光纤设备。光纤设备在结构监测方面有重大的意义。特别地,所选择的装置是SOFO光纤传感器,根据法国首字母缩写词“Surveillance dOuvrages par Fibers Optiques”,由Vurpillot等人深入分析。[37]和Inaudi等人[21]。在这些论文中,作者建立了测量的数学基础,并对嵌入式和表面安装方式进行比较。对于拟议的情况,表面安装的SOFO设备由于实际原因是首选的。嵌入式布置将非常困难,即无法通过非破坏性方法,在发生故障或校准时进行访问。
图2示出了在所提出的主动控制系统中使用的典型SOFO装置。这些光纤传感器由有效区域,即测量区域组成,取决于使用情况,该区域可以从20cm到15m;将设备固定在结构上的两个固定点,以及传输信号的被动区域。测量区域由PVC包层保护,并且包含两根纤维,一根紧密接合到包层上的纤维,因此与该结构相结合,另一条是自由的。第一根纤维用于测量传感器的变形,而第二根纤维用于温度调节。因此,建立零 位移状态的最简单方法是在构建结构部件后安装设备,因为预期在斜拉桥设计中的零载荷为零位移[17]。 因此,系统将被允许进行负载测量而不受干扰。 如果需要,还可以对所提出的传感器进行动态调整。
当然,系统的重点在于桥梁所受的弯矩。从欧拉·伯努利梁理论,众所周知,梁的弯矩和位移可以通过弹性方程进行相关计算。如果是弯矩,是梁的垂直位移,弹性方程应用于点:
(3)
重要的是确保方程式(3)在准静态情况下是正确的。实际上,桥梁设计确保桥梁必须在弹性范围内工作,以适应最可能的荷载组合,其中包括交通荷载。方程式(3)绝对不会在诸如地震荷载这样的极端荷载情况下存在,因为一些塑性变形一定会出现。此外,有趣的是注意到,梁的弹性刚度是x的函数,因此允许桥的一般横截面发展,如可变惯性桥梁设计中的情况。从数据的角度来看,通过考虑三个连续的测量点,,间距h [26],如下:
(4)
因此,如果需要n个力矩值,则取决于位移y的限值,测量点的数量可以是。例如,如果节点i的位移有一个限制,则,那么前一个方程将仅是两个位移的函数,即和。一般来说,如果有
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141291],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

