大直径玻璃钢罐缠绕机系统外文翻译资料
2022-01-11 21:42:16

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
大直径玻璃钢罐缠绕机系统
摘要- 为了解决大直径玻璃钢罐的生产和运输问题,开发了数控缠绕机系统,实现了现场缠绕。该系统的机械部件可以方便地在现场拆卸和组装。基于电子齿轮控制方式,采用嵌入式运动控制器实现同步运动控制。介绍了电机的机械结构、工作原理和制造过程,分析了绕组控制模型、控制程序的功能和实现方法。该系统的应用实现了大直径玻璃钢罐的现场缠绕。
关键词- 玻璃钢储罐,缠绕机,励磁绕组,大直径玻璃钢罐。
一.引言
玻璃钢储罐具有重量轻、耐腐蚀、强度和刚度高、防渗保温性能好、安装方便、维修费用低等优点。广泛应用于石油、化工、电厂、水处理等领域[1-4]。在玻璃钢储罐生产中,通常采用定长往复纤维缠绕工艺。在主轴的旋转运动和小车的往复运动下,树脂浸透的山药纤维按照设计的缠绕方式,通过纤维鼠标有规律地铺在芯轴上,形成复合层。经多层缠绕后,形成纤维缠绕元件[5]。传统的罐体生产是在工厂内采用机械方法或数控绕线机进行的,生产罐体时将其运到现场安装。随着玻璃钢储罐的成功应用,对储罐的直径和容积提出了更高的要求。目前,玻璃钢罐的直径可达25米[6],最大的玻璃钢酸罐的直径可达20米[7]。如果这些大口径罐在工厂内缠绕,由于交通条件的限制,它们不容易,有时不可能被运到安装现场。因此,有必要在野外给这些储罐上弦。现场绕组工艺有效地解决了这一问题。所谓现场绕线,就是把绕线设备分成几个部分,然后运到现场。罐体的生产是在这些部件现场装配后进行的,克服了运输限制。目前,罐体缠绕设备主要分为水平缠绕和垂直缠绕。一般情况下,当储罐直径小于10米采用水平绕组,大于10米采用垂直绕组[8-10]。本文设计了能实现现场缠绕的玻璃钢储罐计算机控制缠绕机系统。该系统的机械部件可以方便地在现场拆卸和装配。根据往复缠绕丝的工艺特点,设计了基于工业计算机和嵌入式运动控制器的开卷机控制系统。在系统中采用矢量控制变换器实现主轴的转速控制。检测主轴角度和
速度由旋转编码器完成。采用交流伺服电机驱动小车,完成精确定位。基于嵌入式运动控制器采用电动齿轮实现绕线机的同步运动控制。本文详细介绍了其机械结构、工作原理和生产工艺。分析了绕组控制模型及控制程序的功能和实现方法。
二.生产工艺及机械结构
缠绕机
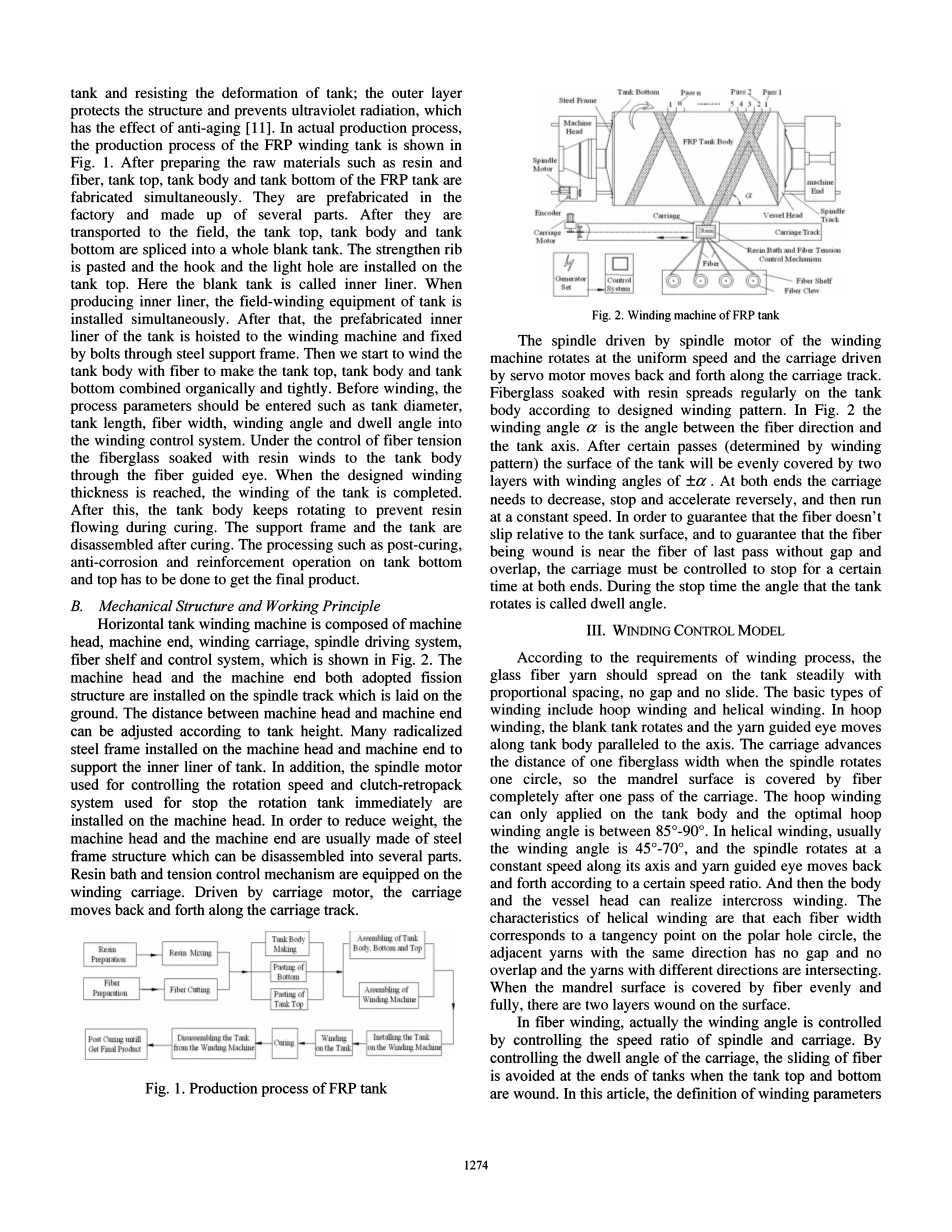
- 玻璃钢储罐的生产工艺尽量采用玻璃纤维增强复合材料,主要由玻璃纤维和树脂组成。玻璃钢储罐是玻璃钢储罐的主要承重构件。树脂用于固定纤维,承受应力并将应力传递到纤维上承受载荷。玻璃钢罐体由罐顶、罐体和罐底三部分组成,分别为预制件。它们装配到预制件(空罐)上后,缠绕上浸有树脂的纤维。由于罐体所产生的压力随高度的变化而变化,罐体的横截面设计为上薄下厚不等。水箱内径相同,外径不同。玻璃钢储罐一般由三部分组成:内衬由内表面和二次内层组成,与介质直接接触,具有防腐、防渗漏的作用;该结构层起着承重罐体和抵抗罐体变形的作用;外层保护结构,防止紫外线辐射,具有抗衰老[11]的作用。在实际生产过程中,FRP缠绕罐的生产过程如图1所示。在制备了树脂、纤维等原料后,同时制作了玻璃钢罐顶、罐体和罐底。它们是在工厂里预制的,由几个部件组成。将其运至现场后,将罐顶、罐体、罐底拼接成一个整体的空罐。将加强筋粘贴在罐顶上,并在罐顶上安装吊钩和灯孔。这里的空罐称为内胆。生产内胆时,同时安装了罐体现场绕线设备。然后将罐体预制内胆吊至绕线机上,通过钢支撑架用螺栓固定。然后开始用纤维缠绕罐体,使罐顶、罐体和罐底有机地紧密结合。绕线前,应将槽径、槽长、纤维宽度、绕线角、驻波角等工艺参数输入绕线控制系统。在纤维张力的控制下,玻璃纤维经树脂风浸透后,通过纤维导眼进入罐体。当达到设计的绕组厚度时,完成油箱的绕组。之后,罐体保持旋转,防止树脂在固化过程中流动。固化后拆下支撑架和罐体。为了得到最终产品,必须对罐底和罐顶进行后固化、防腐、加固等工艺处理。
- 卧式罐式绕线机的机械结构和工作原理由机头、机头端、绕线小车、主轴驱动系统、纤维架和控制系统组成,如图2所示。
机床机头和机头均采用裂变结构,安装在地面上的主轴轨道上。机头与机端之间的距离可根据油箱高度调整。在机头和机头端安装了许多径向钢框架,以支撑罐体内衬。此外,用于控制转速的主轴电机和用于停止旋转油箱的离合器加装系统立即安装在机头上。为了减轻重量,机头和机尾通常采用钢框架结构,可拆分成若干部分。缠绕小车上设有树脂浴和张力控制机构。由小车电机驱动,小车沿着小车轨道来回移动。绕线机主轴电机驱动主轴匀速旋转,伺服电机驱动小车沿小车轨道往复运动。玻璃纤维浸透树脂后,按设计的缠绕方式定期涂于罐体上。
在图2中,缠绕角a为纤维方向与槽轴之间的夹角。经过一定的通径(由缠绕方式决定)后,罐体表面均匀覆盖两层,缠绕角度plusmn;a。在两端的车厢需要减少,停止和反向加速,然后以恒定的速度运行。为了保证纤维相对于罐体表面不打滑,为了保证缠绕的纤维接近于最后一遍的纤维,不存在间隙和重叠,必须控制小车两端停一段时间。在停止时间内,储罐旋转的角度称为停留角。
三、绕组控制模型
根据缠绕工艺的要求,玻璃纤维纱应在罐上均匀分布,间距均匀,无空隙,无滑动。缠绕的基本形式有环向缠绕和螺旋缠绕。在环向缠绕中,毛坯槽旋转,导纱眼沿箱体平行于轴线移动。当主轴旋转一圈时,拖板向前移动一个玻璃纤维宽度的距离,因此拖板一次通过后,芯轴表面完全被纤维覆盖。环向缠绕仅适用于罐体,最佳环向缠绕角度在85°-90°之间。螺旋缠绕时,通常缠绕角度为45°-70°,主轴沿轴线匀速旋转,导纱眼按一定的速比前后移动。再由本体与容器头部实现交叉缠绕。螺旋缠绕的特点是:每根纤维宽度对应极孔圆上的一个切点,同一方向的相邻纱线无间隙、无重叠,不同方向的纱线相交,当芯轴表面被纤维均匀、完全覆盖时,其表面有两层缠绕。面对。在纤维缠绕过程中,卷绕角度实际上是通过控制主轴和机架的速比来控制的。通过控制小车的停留角,避免了罐顶和罐底缠绕时罐底纤维的滑动。本文中绕组参数的定义如图3所示。该W代表纱线的宽度。如果边缘重叠在不考虑纱线的情况下,刀架的周期数等于等分圆截面所需的周期数,用n表示,nw的关系定义如下:
n当然是整数,所以只能通过调节纱线的宽度来满足要求。a是缠绕角。由于纱线的宽度是一个固定的值,而筒体的直径是逐渐变化的,所以缠绕角a也随之变化。因此在控制过程中选择了平均直径。罐体直径小,保证了缠绕角与设定值足够接近。纤维缠绕螺旋展开图如图4所示。图中,D为缠绕罐直径;纤维排列规律(又称缠绕方式)因玻璃钢储罐的形状、尺寸和结构的不同而不同,因此导纱眼与主轴的相对运动也不同。卷绕方式是保证卷绕质量和确定不同方向强度比的关键。通过数学推导,绕线机采用的绕线方式设计模型如下:
其中L为车厢总行程(mm);4ank是水箱的长度;lland LR是两端加减速的长度。L,为超验长度,在绕组中,为光纤导眼与光纤与罐体表面[12]的切线点之间的轴向距离。R为储罐半径;h为光纤导盲眼与罐面之间的距离。Ld为轿厢在两端停留时间相对于主轴的等效移动距离;OR和0L为左右端蜗居角,为主轴在端面上的蜗居过程中旋转的角度;n为yam导向眼在整个蜗居周期内的周数;i为卷绕速比,表示锭子在一次小车进、出过程中的转速循环;M为绕组速比的整数部分;M为绕组速比i的整数;W为纤维yam的宽度(mm);da是水箱的平均直径;K in为绕组速比的小数部分;K是小于n的整数K和n之间没有公约数。在生产中,通过对缠绕角和纤维宽度的微调,使缠绕比i达到(6)。当yam导眼循环次数达到n时,纤维将覆盖整个罐面[13]。
四.绕组控制系统的设计与原理
在绕制过程中,当小车按照工艺要求前后移动时,小车电机会进行加速和减速。车架和主轴的载荷随着树脂用量的变化而变化,容易导致导纱眼和罐面相对位置的移动,导致缠绕方式错误,纤维研磨不良。由于绕组系统是非线性速度同步控制系统,具有时间依赖性的大惯量,因此采用基于电子传动的跟踪控制方式来实现绕组同步控制。电子齿轮模式实际上是一种多轴坐标模式,其运动效果类似于两个机械齿轮的啮合运动。当电流轴在电子齿轮模式下工作时,需要设置电子齿轮的传动比,电流轴根据这个传动比跟随驱动轴的运动。驱动轴的运动方式可以是任何一种运动。电流轴的运动位移增量等于被连接驱动轴的位移增量乘以电子齿轮的传动比。该绕组控制系统的硬件结构如图5所示。
上位机采用台湾Advantec IPC610工控机,通过RS-232串口与英国Trio运动技术公司的mc206运动控制器进行通讯,形成开放式运动控制系统。工业计算机具有人机界面管理、运动状态显示、远程监控、工艺文件保存等功能。运动控制器进行运动和逻辑控制。该结构支持软件升级和功能扩展,上下两级开度,绕线机主轴电机为18.5KW交流三相异步电机,由安川CIMR-G7逆变器驱动。主轴电机采用矢量控制方式,保持主轴转速稳定。运动控制器的模拟输出是给逆变器的速度控制信号。为了实现逆变器的速度控制,我们在运动控制器的开环状态下设置了模拟输出电压。采用欧姆龙E6B2-CWZlX旋转编码器检测主轴的角度和转速。小车采用安川SGMGH-75ACA61伺服电机,根据绕线过程,以一定的响应速度和精度完成主轴的位置跟踪。小车控制轴采用伺服方式工作,实现小车伺服电机的闭环控制。主轴编码器的反馈连接到MC206编码器接口,为小车的同步运动控制提供输入脉冲指令.
缠绕控制系统软件设计
A.绕组运动控制
所述卷绕小车的运动规划和控制的循环单元是从容器头部到容器端并返回到所述头部。经过n次循环(往复),可完成两层绕组。绕组的同步运动控制是通过一个名为MOVELINK的三元运动控制器的控制命令来实现的。动链是驱动轴和从动轴的位置同步控制指令,可以看作是具有变速比的电子齿轮。命令可以意识到驱动轴同步驱动轴的连接在一个预定的距离在坦克卷绕机的控制系统,我们可以完成绕组使用链接命令操作这个轴协调运动的主轴和马车。该功能可以精确角度启动小车,控制两端加减速段小车位移,使主轴与小车同步运动段速比恒定。这个命令的语法是MOVELINK (distance, link dist, link acc, link dec, link axis, link options, link start)[14]。往复运动中卷绕小车的运动规划与控制如图6所示。
主轴在零点时开始运动,通过磁头停留角edh后,驱动轴与从动轴之间的连接开始。在加减速段(假设为300),从动轴完成加速度运动后,与驱动轴开始同步运动。在同步运动过程中,当驱动轴的运动发生变化时,驱动轴的转速也随之发生变化。同步运动一段距离后(假设为300),从动轴开始减速,在预定的加减速距离内完成减速过程。当它通过端止点角edt #39;时,车厢开始反向连接运动,与正向运动过程相反。在此之后,车厢的运动循环就完成了。车厢的连接过程可分为加速、减速和同步三个部分,分别由三个MOVELINK命令实现,将这三个命令相加,得到包含三个运动部分的命令。
B.绕组控制系统软件设计
采用微软公司vc 6.0开发的基于Windows 2000平台的卷绕控制系统工业计算机软件。它具有工艺文件设置与管理、远程监控、运动状态显示等功能。IPC基于MODBUS协议,通过RS232串口与MC206通讯,实现工艺参数的下载和机床状态的上传显示。MODBUS中的通信基于请求/响应模式。在该系统中,IPC设置为主站,MC206设置为从站。只有当主服务器发出请求时,从服务器才能响应,而从服务器不能主动发送数据。在选定油箱类型并下载到控制器后,MC206将完成所有的绕组运动和逻辑控制。从机只响应主机的查询并传输绕组状态信息。即使IPC出现故障或由于某种原因停机,也不影响电流罐的绕组过程。从而提高了绕组控制系统的稳定性和实时性。MC206的运动控制程序是用多任务三角基本语言编写的。通过运行在PC机至MC206上的motion Perfect软件下载运动控制程序,可以独立运行。
1)下位机控制任务编程:
对于更复杂的应用程序,将执行优先级分配给程序是很有用的。默认的伺服周期是Irns,这段时间内部分为3个时间槽,每个时间槽1/3ms,内部分别用于处理伺服功能、通信和一般的“管家”任务。每个插槽中的剩余时间用于运行用户的应用程序。控制器MC206上可用的最大进程数为7,程序可用的进程数由从I到7的数字标识。编号最高的两个进程(7和6)分配一个固定的时间槽。这些被称为“快速”任务。它们应用于以下过程:保证每一个伺服周期的加工;大量的计算或处理;程序执行,在任务启动或停止时速度不变。任何其他进程(0到5)都称为“标准”任务,每个任务具有相同的优先级。因此,随着运行的程序数量的增加,执行速度将会降低。可以使用run命令强制程序在特定进程上运行。控制器的“命令行”界面可以通过打开一个运动完善的“终端”窗口来设置,用来从Pc上输入命令。命令行接口总是使用通道0[14]。控制程序的功能和时间分配如图7所示。任务7用于控制卷绕机的同步运动控制和逻辑控制。任务6用来管理机床的I/O信号,并控制芯轴的转速。使用Task 2完成串口通信功能。Task 1用于处理错误和故障。在这些任务中,6和7的优先级最高。每个伺服器分配时间。Task 1、Task 2和Command Line具有相同的优先级,在每个伺服周期中,依次为它们分配时间槽。
2)移动命令缓存机制:
TRIO对运动命令采用缓冲策略,命令传输过程如图8所示。
应用程序必须在进程中运行,并且可以指定进程的数量。每个进程都是唯一的,并且只能指定一个正在运行的过程。运行中的每个进程都为其“运动命令”分配了一个运动缓冲区。当进程实现一个移动命令时,它将首先查询当前的移动缓冲区是否为空,如果是空的,进程将放置移动命令。否则,进程将暂停,直到缓冲区为空。系统缓冲区采用轮询机制。它不断地检查每个进程的PBUF中是否有移动命令。如果是,轮询机制将判断命令指定的轴的最后一个缓冲区
全文共6781字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[1672]
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。