小世界网络演化模型及其仿真外文翻译资料
2022-09-08 12:28:52
英语原文共 22 页,剩余内容已隐藏,支付完成后下载完整资料
27-49
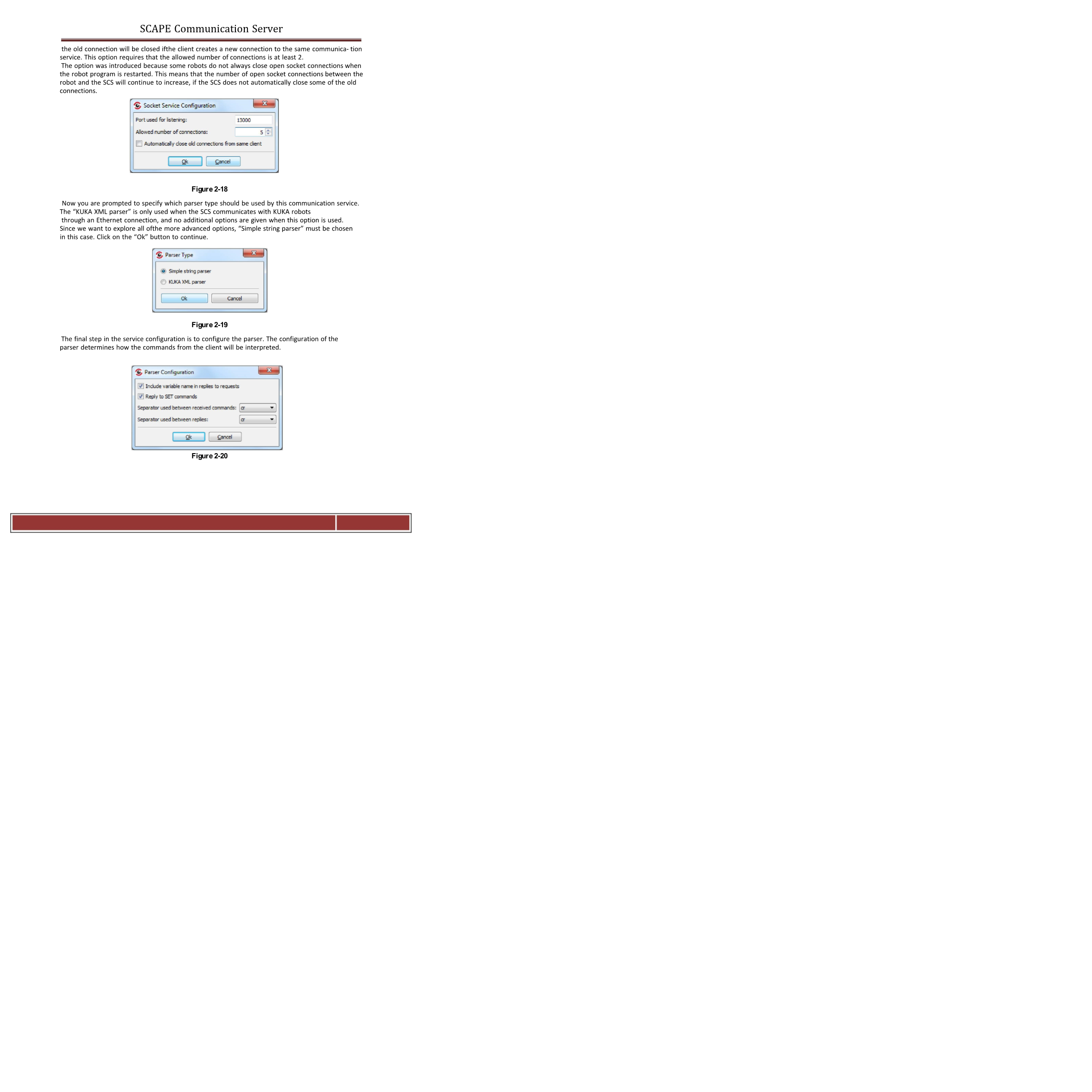
如果客户端在同一个连接服务器创建了新连接,那么旧连接将会被关闭。此选项要求允许的连接数至少为2。在这里介绍这个选项是因为当机器人程序重新启动时,一些机器人不一定关闭SOCKET连接。如果SCS不自动关闭一些旧连接,这意味着机器人和SCS之间的开放式SOCKET连接的数量将继续增加。
图 2-18
现在提示您指定该通信服务使用哪个分析器类型。 KUKA XML parser这个选项仅用于SCS与KUKA机器人通过以太网连接情况下,并且当使用此选项时,不会给出其他选项。因为我们希望探索所有更高级的选项,所以在这种情况下,必须选择“Simple string parser(简单的字符串分析器)”。点击“ok”按钮继续。
图2-19
服务配置的最后一步是配置解析器。解析器的配置决定了客户端的命令将如何被解释。
图 2-20
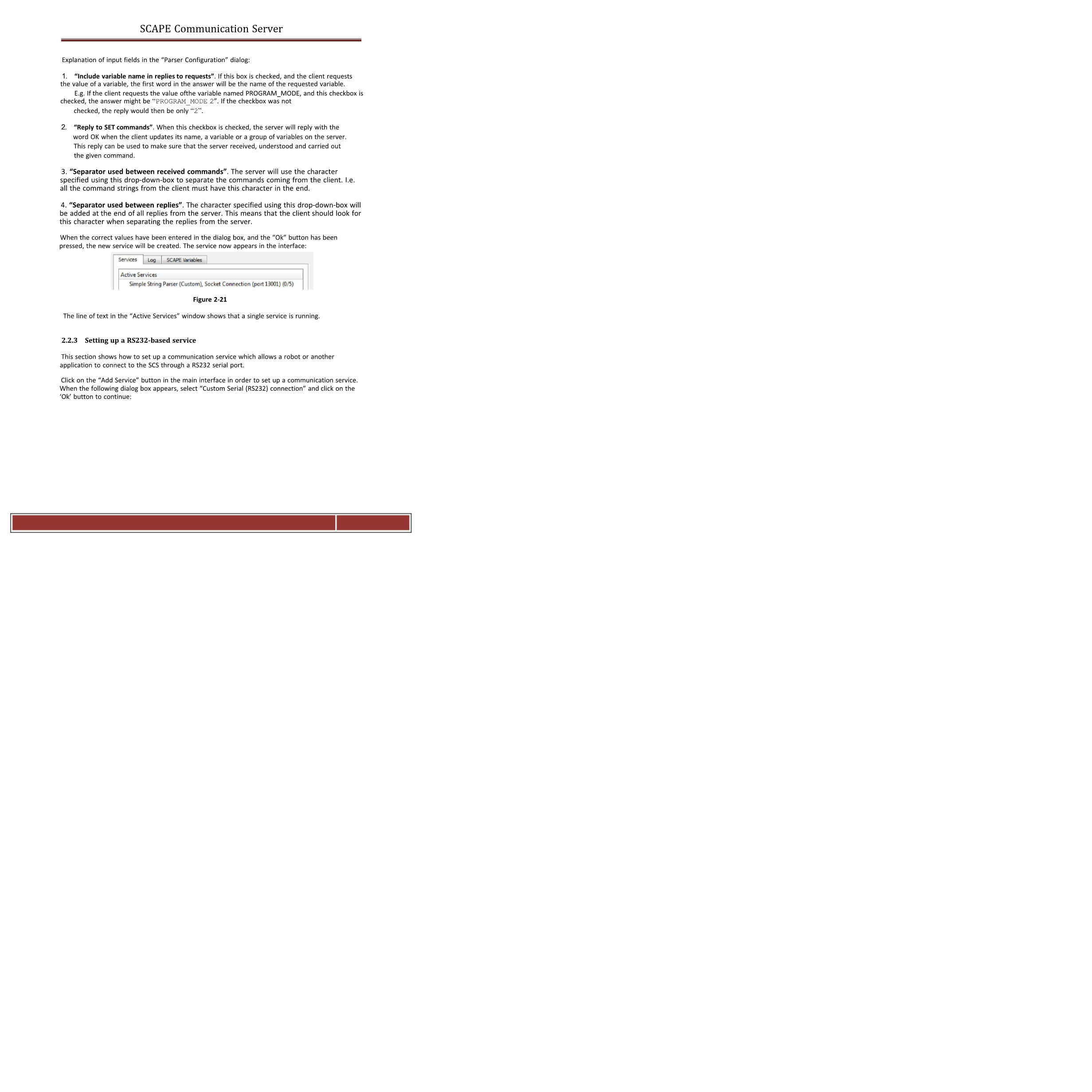
“解析配置”对话框中输入域的解释:
- “Include variable name in replies to requests”:如果这个框被选中,且客户端正在请求变量的值,那么在答复中的第一个单词将是被请求变量的名称。
例如:如果客户端请求的值的变量命名program_mode,此选项被选中时,答案可能是“program_mode 2”。如果选项没有被选中,答复将是“2”。
- “Reply to SET commands”:该选项被选中,在客户端更新服务器上的一个变量或一组变量名称时,服务器将会回复“ok”。这个回复可以用来确保服务器接收、解析和执行给定的命令。
- “Separator used between received commands”:服务器将使用该下拉框中指定的字符来分隔来自客户端的命令。即客户端的所有命令字符串必须在结束时有该字符。
- “Separator used between replies”:在服务器的所有答复结束时添加该下拉框指定的字符。这意味着客户端会在分离来自服务器的应答时寻找这个字符。
当对话框中输入正确的值时,“OK”按钮已被按下,将创建新的服务。服务现在出现在界面中:
图2-21
“Active Services”窗口中显示的是一个单独的服务正在运行。
2.23.建立一个基于RS232的服务
本节说明如何设置允许机器人或另一个应用程序通过RS232串口连接到SCS通信服务。
在主界面上点击“添加服务”按钮以建立一个通信服务。当出现以下对话框,选择“Custom Serial (RS232) connection”,然后点击“OK”继续:
图 2-22
注意,如果你想通过RS232接口连接KUKA机器人到SCS,那么你应该选择“Serial Connection To Kuka Robot(串行连接KUKA机器人)”,这时不需要对命令解析器的进一步配置。
串行端口的设置不应该像下面显示的那样,但是机器人/应用程序和该服务必须能够同时接受每秒位数,数据位,奇偶校验位,停止位和流量控制这些设置。
图2-23
当串行端口已配置时,解析器必须配置。解析器配置对话框中已经被解析的选项称谓“Setting up a TCP/IP Socket Communication Service”。如果我们想要连接的服务器和机器人,且使机器人中的通信代码尽可能简单,设置如图2-24所示。
为了使机器人易于解析服务器的回复,服务器只回复了值,而不是变量名(“Include variable name in replies to requests”未勾选)。“Reply to SET commands”也未被选中。这两个改变的目的是通过减少在SCS和机器人之间来回传输的数据量,提高通信的速度。因为在使用串行通信时遇到的低通信速度,这种改进通常是很重要的。在机器人程序中输入一个回车字符可能会出现问题,所以这里的#字符作为命令分隔符。
图 2-24
因为只有一个机器人(或电脑)可以连接在一个串行电缆两端,当创建服务时,该应用程序假定机器人和电脑之间的连接是瞬时连接。在SCS界面上可以看到新的服务和相应的连接,如下图所示:
图 2-25
目前已配置并准备使用的服务。以下描述了如何从SCAPE Calibration Manager连接SCS,来确保基于SOCKET的通信服务工作正常。
2.2.4通过使用SCAPE Calibration Manager应用来测试SCAPE系统和SCS之间的连接
当机器人已被配置为使用SCAPE(即SCAPE机器人程序的文件已被复制到机器人中,对机器人的设置进行了调整等),SCAPE系统与机器之间的连接可以使用SCAPE Calibration Manager来测试。在SCAPE Calibration Manager程序开始之前,SCS必须启动,对SCS通信服务的通信范围必须被配置为SCS与SCAPE应用程序之间的通信范围,以及SCS和机器人之间的通信范围。当SCAPE Calibration Manage启动后,它应该自动连接到SCS。如果未自动连接,则需要更改连接设定。参阅“配置SCAPE Calibration Manage与SCS之间连接”校准管理器用户手册,以获得有关如何改变通信设置。
如果连接尝试是成功的,下面的文字将显示在消息窗口SCAPE Calibration Manage中:成功连接到SCAPE通信服务器!
下一个步骤是选择和运行SCAPE_CALIBRATION机器人程序,对于KUKA机器人,这个程序可以在机器人上的“R1/Program/Scape”文件夹中找到。在机器人恢复到初始状态时,它将会连接到SCS,并且开始等待来自SCAPE系统的命令。当机器人已经连接到SCS,一个新的连接将在SCS看到,然后当机器人程序开始运行时,从机器人到SCS的总指令数将被增加,如图2-26所示。请注意,如果使用了不同品牌的机器人,该解析器类型以及连接的名称将不同。
图 2-26
下一步是在SCAPE Calibration Manager中右键单击工作单元树中的机器人,选择“检测机器人”菜单项(图2-27所示),弹出了“机器人测试”对话框(如图2-28所示)
图 2-27
图 2-28
为了测试SCAPE Calibration Manager与机器人之间的通信,我们将让SCAPE系统命令机器人移动到新的位置。为了做到这一点,就要为机器人创建一个新的任务。在“Robot Test”对话框中点击“Add Task”按钮。弹出“Task Type Selection”对话框,询问要创建哪种任务类型。选择“Motion Task”,点击OK按钮继续。
图 2-29
“Motion Task Properties”对话框将出现。看机器人的示教器,以确定机器人的当前坐标。注意输入到“Motion Task Properties”对话框中的坐标,必须为机器人当前的坐标。这可以确保通过对机器人的当前位置只增加一个小的偏移量。 即使机器人只移动了10厘米,我们就可以知道SCAPE应用与机器人工程之间进行了通信。
图 2-30
现在,在Motion Task Properties窗口中点击保存按钮。返回“Robot Test”对话框后,单击列表中的任务,然后单击“Perform Tasks”按钮。
图 2-31
现在尝试用SCAPE软件将任务转移给机器人,值得注意的是,机器人的程序必须运行在这个坐标上,否则,机器人将无法从SCAPE软件接收信息!
如果SCAPE软件和机器人之间的通信正常工作,机器人将移动到任务指定的坐标。如果出现问题,而且这个程序似乎一直等待来自机器人的响应,你可以按“取消”按钮中止。
附录一:如何创建和测试Kawasaki机器人或ABB机器人与SCS的连接
可以遵循下面的步骤来测试Kawasaki机器人或ABB机器人与SCAPE PC 之间的通信。首先,确保Kawasaki或ABB兼容的通信服务在SCS中被配置。如果这还没有完成,在SCS图形用户界面点击“Add Service”按钮。最后,在“Socket Service Configuration”对话框中选择“Socket Connection to ABB or Kawasaki Robot”,然后点击OK。现在与Kawasaki和ABB的SCAPE 机器人程序兼容的服务被创建。
图 3-1
图 3-2
为了测试连接,运行在机器人的SCAPE_COMM_TEST()程序。在ABB版本的机器人程序中,SCAPE_COMM_TEST()程序在应用模块中。
程序将连接到SCS,重命名连接,然后进入一个死循环,使它与SCS保持连接。当这个连接循环启动后,在SCS有可能可以观察到程序的动态。在连接描述中的命令计数器中的数将继续增加。
如果SCAPE_COMM_TEST()程序无法连接到南海,可能有几个原因。
bull;请检查机器人和电脑之间的网络连接是否完好,并已正确插入。
bull;确保在电脑上的防火墙不会阻止机器人的尝试连接。
bull;确保在机器人程序中设置的IP地址与PC的IP地址相匹配。Kawasaki机器人的IP地址可以在OPEN_CONNECTION()程序中找到。对于ABB机器人,它的地址被定义在“通信”模块的顶部。
bull;也要确保在SCS服务的SOCKET数量对应于机器人程序中指定的SOCKET数量。对于Kawasaki机器人,端口号是在OPEN_CONNECTION()程序中。对于ABB机器人,端口号被定义在“通信”模块的顶部。
4附录B:如何在KUKA机器人程序连接到SCS,使用RS232连接(只限于KSS v5.X的KUKA机器人)
下面的部分将描述当机器人使用RS232电缆连接到PC,如何在KUKA机器人程序连接到SCS。
第一步是确保机器人的串口已正确配置。在KUKA机器人上配置串口时,程序使用的是CREAD和CWRITE的命令文档。(“SOFTWARE / KR C / CREAD CWRITE / RE- LEASE 4.1”)。通过修改“C:KRCRoboterINITHW_INF.INI”激活串口,串口可以通过修改“C:KRCRoboterINITSERIAL.INI file”配置。这个文件可以像如下所示:
[ COM1 ]
BAUD=1 15 2 00
CHAR_LEN=8 ; 7,8
STOP_BIT=1 ; 1,2 at time not changeable
PARITY=0 ; EVEN=2, ODD=1, NONE=0
PROC=4 ; 3964R=1, SRVT=2, WTC=3, XONXOFF=4 [ COM2 ]
BAUD=1 15 2 00
CHAR_LEN=8 ; 7,8
STOP_BIT=1 ; 1,2 at time not changeable
PARITY=0 ; EVEN=2, ODD=1, NONE=0
PROC=4 ; 3964R=1, SRVT=2, WTC=3, XONXOFF=4 [ COM3 ]
BAUD=1 92 0 0
CHAR_LEN=8 ; 7,8
STOP_BIT=1 ; 1,2 at time not changeable
PARITY=O ; EVEN=2, ODD=1, NONE=0
PROC=4 ; 3964R=1, SRVT=2, WTC=3, XONXOFF=4
[3964R]
CHAR_TIMEOUT=500 ; msec
QUITT_TIMEOUT=500 ; msec
TRANS_TIMEOUT=2000 ; msec
MAX_TX_BUFFER=2 ; 1. .5
MAX_RX_BUFFER=10 ; 1 . .20
SIZE_RX_BUFFER=100 ; 1. .2048
PROTOCOL_PRIOR=1 ; HIGH=1, LOW=0
[ SRVT ]
CHAR_TIMEOUT=200 ; msec
MAX_TX_BUFFER=2 ; 1. .5
MAX_RX_BUFFER=2 ; 1 . .20
SIZE_RX_BUFFER=100 ; 1. .2048
[WTC]
CHAR_TIMEOUT=200 ; msec
MAX_TX_BUFFER=2
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146409],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。