
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
圆形合成孔径声纳成像和声学目标强度测量的轨道系统:
设计/操作/初步结果
J.L.Kennedy, a) T.M.Mars-ton, K.Lee,J.L.Lopes,and R.Lim
Naval Surface Warfare Center, Panama City Division, 110 Vernon Ave., Panama City, Florida 32407, USA
(2013年8月21日收到;2013年12月21日接受;2014年1月15日在线公布)
设计了一个配备移动式声纳塔台车的22米直径圆形轨道,利用水下声学传感器测量,在大型淡水池底部的1.5m厚的沙子上组装,进行声纳设计和目标散射响应研究。移动声纳塔通过由定制的Lab VIEW软件控制的驱动电机沿着轨道转换。轨道系统是模块化的,由单独部署八个圆弧段组成,测量标称中心半径为11m,每个圆弧长8.64m,并由潜水员在水下环境中连接在一起。该系统能够在不中断目标设置的情况下,实现对具有0.1◦角分辨率的感兴趣目标的全面测量, 在标准现场测量中提供对目标环境条件和噪声源无法实现的控制水平。在最近的使用中,移动小车携带一个装有仪器的声纳塔被翻译为在720。相等的位置增量和每个位置获取声学反向散射数据。此外,该系统可以兼顾宽带单站和双站散射测量的目标,允许在不同配置下捕获目标特征现象,以解决目前在地雷对抗和未爆弹药应用方面遇到的科学和技术问题。在这里讨论的工作中,循环轨道电路用于声学反向散射测试,但是该系统还具有促进从感兴趣目标获取磁性和光学传感器数据的能力。将简要说明系统设计和运行情况,以及对在巴拿马市部门试验水池设施进行声学测量所得数据的初步处理结果。[美国海军研究办公室和战略环境研究与发展计划支持的工作。]
[http://dx.doi.org/10.1063/1.4861353]
一.导论
声纳探测目标是世界各地对地雷对抗(MCM)和未爆弹药(UXO)补救任务的高度期望。现代检测方法包括从合成孔径声纳(SAS)数据中处理图像,这些数据是在条带搜索模式中采集的,声纳在名义上直线传播,并通过目标区域扫描重叠的区域。当感兴趣的目标从线性路径使声穿透时,记录从目标的有限离散范围的目标的反向散射信号的一组数据。结合现代运动补偿算法,以纠正路径偏差所造成的误差, SAS数据可以处理成高分辨率和信噪比(SNR)1–6或声学颜色图(目标强度标绘于频率和目标方位角)的图像,显示重要的光谱特征,但仅限于可用的角度范围。
圆形合成孔径声纳(CSAS),也称为闭环合成孔径声纳,是另一种数据收集方式,声纳平台通过在周围的近似圆形轨迹从局部区域收集数据。7CSAS最近获得了兴趣,因为: (1)所获得的数据允许在整个360。范围内生成声学颜色目标模板, (2)通过将目标信号从一个完整的方面包括,辅导处理的图像显示了比SAS更好的形状分辨率,8-11(3)最近在海军水面作战中心开发的运动补偿算法,巴拿马城市部门(NSWC PCD)对接近圆形的传感器路径进行了处理,即使从自治水下机器人(AUV)采集到的数据也具有实际应用价值。12CSAS产生的图像表示了目标的三维声学反射率在二维成像平面上的投影,与传统的SAS方法相比,最大方面相关信息。最近的文献表明,分类器性能如何取决于每个检测可用的方面角度的范围。13虽然必须容忍区域范围内的贸易,但CSAS可以通过在360。范围内捕获目标数据,为基于图像和声学颜色的分类和识别目标产生更好的结果。
在这里提出的轨道系统旨在实现几个目的:建立目标数据库,用于训练和测试自动目标识别(ATR)算法,为声纳仿真模型(例如有限元素(FE)解、FE与基于射线的传播模型)进行验证,研究复杂目标的物理起源,演化,掩埋和海底条件对复杂目标散射现象的稳健性,并生成数据以研究改善CSAS图像处理的方法(例如,三维扩展)。为了证明这些目的可以得到满足,将介绍和讨论从与铁路系统收集的数据处理的一些CSAS图像和声学颜色结果。在第二节我们简要介绍了用于进行水下声学测量的设施。提供了测量装置的概要,详细介绍了铁路系统、声纳塔、传感器和电子设备。讨论了在数据收集之前为优化未固结沉积物底部的钢轨稳定性而采取的步骤,并讨论了残余运动。第三节介绍了所进行的测量的初步结果。在第四节,提供了突出显示所示设备的摘要。
二.轨道描述和操作
A. 圆形轨道的设计与施工
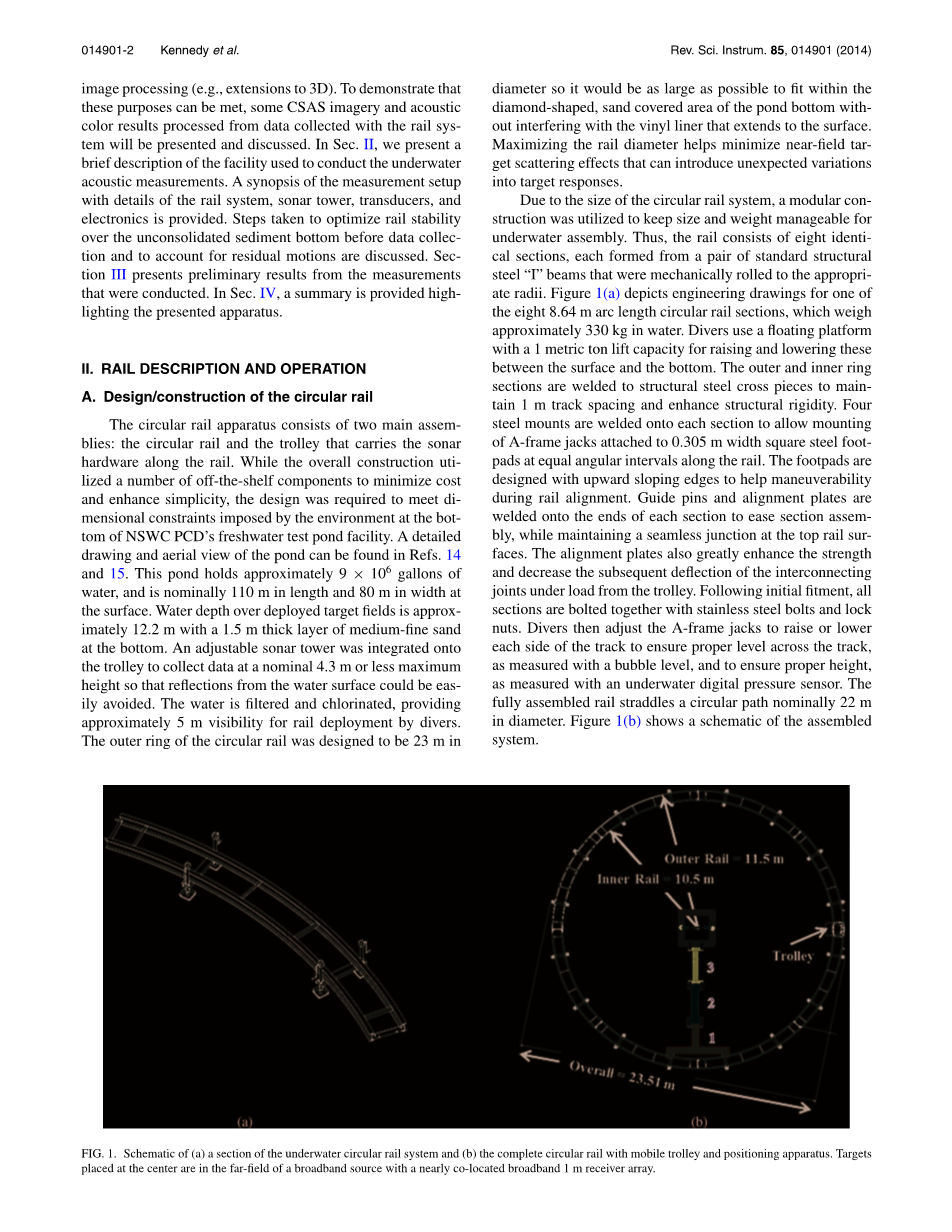
该圆轨装置由两个主要组件组成:圆形轨道和载着铁路沿线声纳硬件的滑车。虽然整体施工使用了一些现成的部件,以尽量减少成本和提高简单性,但设计需要满足在NSWCPCD的淡水试验水池底部环境所施加的尺寸限制。在参考文献14和15可以找到一个详细的绘画和鸟瞰池。这个大约长度为110米,表面宽80米的池塘容纳约9times;106加仑的水,。已部署的目标油田水深约为12.2米,底部为1.5m厚的中等细砂。一个可调的声纳塔被集成在滑车上,以在标称4.3米或更小的高度收集数据,以便能够容易地避免水面的反射。水被过滤和氯化,为潜水员提供大约5米的钢轨部署能见度。圆形轨道的外环被设计为直径为23米,因此它尽可能地适合于池塘底部的菱形覆盖区域,而不干扰延伸到表面的乙烯基衬里。最大化轨道直径有助于最小化近场目标散射效应,可以将意想不到的变化引入目标反应。
由于圆形导轨系统的尺寸,采用模块化结构来保持水下装配的尺寸和重量。因此,钢轨由8个相同的截面组成,每个截面由机械轧制到适当半径的一对标准结构钢“I”梁形成。图1(a)描绘了一个8米长的圆弧长度圆形钢轨剖面的工程图纸,其中约有330公斤在水中。潜水员使用漂浮平台,具有1吨提升能力,提高和降低表面和底部之间。外、内环部分焊接结构钢横梁,以保持1m的轨道间距,提高结构刚度。每个截面上焊接了四个钢支座,以允许安装一个连接到宽度为0.305m方形钢脚架的框架千斤顶沿轨道相等的角度间隔。脚架设计采用向上倾斜的边缘,以帮助在轨道调整中的机动性。导向销和定位板焊接在每个部分的端部,以方便部件装配,同时在顶部的导轨表面保持一个无缝连接。定位板还大大提高了连接节点的强度,减少了连接节点的后续挠度。
图1. (a)水下环行轨道系统的剖面图和( b)配有移动滑车和定位装置的完整的圆形轨道。中心放置的目标位于一个宽带源的远场,具有近有限公司宽带1m接收器阵列。
在初始装修后,所有部分都与不锈钢螺栓和锁紧螺母一起固定。然后,潜水员调整a-框架千斤顶,以提高或降低轨道的每一侧,以确保在轨道上适当的水平,测量气泡水平,并确保适当的高度,如用水下数字压力传感器测量。完全组装的轨道横跨一个直径为22米的圆形路径。图1(b)显示组装系统的示意图。
每个钢铁路组件都热浸镀锌,采用强硬的镀锌涂层,以大大提高钢在水下和储存在沿海环境中的生存能力。这种镀锌钢组合,也用于下文描述的电车组件的部分,是一种环保、经济的设计,可替代高价金属和涂料。
制造了一种低成本聚氯乙烯(PVC)装置,潜水员用于在声学反向散射测量期间准确定位轨道系统中心的目标。这在图1(b)中示出作为连接轨道与1.8mtimes;1.8m蓝色中心的三个彩色线形部分。这三个线性区段的设计与闩在每一端,以便他们可以连接到轨道和彼此足够的刚度保持径向对齐。穿过广场PVC部分的线路帮助潜水员精确定位。潜水员仔细地刮掉这一地区的沉积物,以尽量减少在定位目标之前的混响噪音。一旦目标正确定位,将移除定位装置以进行数据收集。
台车的主要用途是支持和运输环绕环形轨道系统的试验装置。包括一个镀锌的0.762m宽times;0.0254m厚的钢板的台车乘坐四个聚氨酯包裹的铝制轮毂车轮安装在固定位置使用阿克曼的几何形状。此配置允许两个车轮跟随内导轨半径和两个车轮跟踪外部导轨半径,最大限度地减少车轮的颤振、磨损和滑动,并减少滑轨与导轨之间的摩擦。为了进一步确保轨道上的滑车的准确定位,稳定支撑设计并安装在滑车两侧,沿着轨道的外侧。每个支腿由四个水平的车轮组成,以接触支撑台车的“I”梁的凹进外侧。这些车轮可以调整,以保持电车沿着轨道运行,并防止车轮中心不必要的旋转。作为附加的安全措施,如果塔安装在其上部和下部“I”梁法兰之间的位置,这些稳定支撑将使台车不会倾倒。
控制滑车的运动和声纳平台组件所需的两个压力容器被集成在滑车上。两个外部车轮都直接连接到一个不锈钢正时皮带滑轮通过一个简短的键控不锈钢轴。反过来,两个滑轮由一个肋的正时皮带连接,该带由与包围在压力容器中的一个电动步进电机连接的第三个正时皮带滑轮驱动。用于驱动小车的步进电机选择允许精确控制平移距离,尽管它与标准直流电机相比具有电绝缘性。另一压力容器包含用于控制电机和测试装置硬件所必需的电气硬件。所有压力容器均为不锈钢结构,并通过电缆与水下接头连接件进行通信。除了这两个压力容器外,焊接的模块化塔架被螺栓到滑车基座中心以支撑声纳平台组件。模块化塔身,包括焊接在0.9m、1.2m和2.1m长的不锈钢管道上的架子不锈钢管道法兰,可以用螺栓将声纳平台组件的高度从底部的1.5m调整到最大高度4.3m。图2(a)显示了圆形轨道上的移动小车,带有压力容器和塔式建筑。
声纳平台组件螺栓到滑车塔架顶部,并允许将所附声纳发射器和接收器准确定位朝向目标场区。该平台由不锈钢耐腐蚀构造,一个包含单个电动步进电机的压力容器安装在其上,允许垂直平面上平台倾斜。因此,附着声纳对底部使声穿透的放牧角可以从顶部控制站远程遥控。图2 (b)显示了附着在声纳塔上的声纳平台组件,安装的声源和接收器。原则上,轨道可以很容易地容纳另一个电车来分离双站数据收集的源和接收器,但本文论证的条件是单站。
设计了一种低成本的电缆管理系统,用以指引从测试水池底部的声纳台车向岸上的测试仪表大楼的电缆。两个环浮筒,一个用于电力和输电线路,另一个用于电机控制和接收线路,被放置在池塘中央,用蓝绳锚定到岸上,并固定到混凝土团块。虽然所有电缆都被屏蔽,但将它们分为电源/传输和电机控制/接收组,则需要进一步减少这些线路之间的交叉串扰。在整个电缆上每隔几英尺用拉链和潜水胶带将电线捆绑到电缆。绳索/缆绳束被锚定在岸上,到测试水池周围的混凝土块或锚定点。在图3中展示部署后的管理系统的顶部视图照片。圆形系泊浮筒系在绳索/缆绳束上,与不锈钢钩环大约每3m在海岸与戒指浮筒之间,以支撑在空气-水界面下的电缆。小泡沫漂浮物,在图4中突出显示,连接在戒指和滑车之间的绳索/电缆束,以防止电缆进入声纳传感器和目标场之间的声学测试区域。最后,电缆束被锚定在绳索的末端,并通过被机加工的固定装置安装在声纳台车上,作为对电缆的应力释放。在操作过程中,通过沿导轨顺时针或逆时针旋转一圈,使拉线的扭转最小化。小车位置的位置反馈由小车电机编码器提供,同时还有两个磁开关连接到台车平台上。战略上位于铁路上的高强度磁体,可以在移动过去的位置时精确确定滑车位置(例如,0。、90。、180。和270◦,其中0。是起始位置)。
图2.(a)圆形轨道上的移动小车和(b)声纳塔上装有安装 (#2和#3)和接收器(#1和#4)阵列的水下照片
图3.NSWC试验池表面电缆管理系统照片。
B.铁路系统水准过程/噪声评估
由于池塘沉积物的低剪切强度,使承载的滑车重量的轨道区段的沉降可导致在声学反向散射测量期间,导致声纳至垂直方向的垂直方向的径向平面的微小弯曲。为了解决这一问题,在数据收集之前实施了一个水准测量过程。首先,使用精密深度测量仪对轨道系统进行初始调平。其次,将满载的小车绕在整个轨道上多次转动,以压缩与脚架接触的砂。在最后运行期间,记录了滑车的角度和平移运动,以确定轨道没有适当调平的位置和/或未对千斤顶进行适当调整。潜水员随后对千斤顶进行相应调整,以适当地加载千斤顶并减小挠曲至69.12m上方的声纳塔顶部的最大径向位移在0.105m以内。这导致将台车上的声纳塔的总体在随后的数据收集运行中倾斜限制在0sim;1。内。
图4.NSWC PCD试验站电缆管理系统的侧视示意图。
为了减轻剩余的运动的影响,在所有测量期间在目标区部署了一个小型全向散射,以便利用它所反映的信号的时间来监测和纠正每个轨道位置沉积物支架不足造成的声纳角度偏差相关的任何相位误差。所收集数据的相位校正是通过确定呈现该散射的声学图像的相位偏移来完成的,该相位偏移最局限在空间(即点像)。然后,还可以校正来自附近目标的信号的时间,并将它们的信号适当地隔离,以便使用之前在参考文献11中进行的用于CSAS图像处理的空间遮蔽和滤波技术进行进一步分析,同样适用于线性扫描中目标信号的隔离,详见参考文献16和17。这些空间遮蔽和滤波技术通过与部署于纠正相位误差的全向散射相关联的信号有效地防止目标信号的声污染。
圆形轨道测量通常配置为提供最大可能的时间窗口,收集分散的信号,而不污染池塘边界的回声。通过仔细分析未部署任何目标收集的脉冲压缩数据,确认了这一点。建立了较大的清洁时间窗,以低水平的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139053],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

