
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于最大相似度区域合并的交互式图像分割
Jifeng Ninga,b,c, Lei Zhanga, , David Zhanga, Chengke Wub
a香港理工大学计算学系生物特徵研究中心,香港九龙
b西安电子科技大学综合服务网络国家重点实验室,北京
c西北农林科技大学信息工程学院,杨凌
文章信息
文章历史:
2008年6月1日收到
于2009年1月3日收到已接受2009年3月2日之修订表格
关键词:
图像分割
区域合并
最大相似度
均值漂移
摘要
有效的图像分割是计算机视觉和目标识别中的一项重要任务。由于对自然图像进行全自动分割通常是非常困难的,因此一些简单的用户输入的交互方案是很好的解决方案。提出了一种基于区域合并的交互式图像分割方法。用户只需要使用笔画粗略地表示对象和背景的位置和区域,这些笔画称为标记。提出了一种新的基于最大相似度的区域合并机制,利用标记来指导区域合并过程。如果Q在所有Q的邻域中与Q相似度最高,则将区域R与其邻域Q合并。该方法将初始分割的区域通过均值平移分割自动合并,将所有非标记区域标记为背景区域或目标区域,有效提取目标轮廓。区域融合过程对图像内容具有自适应性,不需要预先设置相似阈值。实验结果表明,该方法能够可靠地从复杂背景中提取目标轮廓。
爱思唯尔有限公司
1. 介绍
图像分割是将目标从背景中分离出来。一般来说,自然图像的颜色和纹理特征非常复杂,从背景中对目标进行全自动分割是非常困难的。因此,结合用户交互的半自动分割方法被提出[2,4,10,13,17,20,21,24],并越来越受欢迎。例如,在主动轮廓模型(ACM)中,即snake算法[2]中,用户对初始曲线的正确选择可以很好地收敛到真实的物体轮廓。同样,在graph cut算法[10-12]中,用户获得的先验信息对分割性能至关重要。
低水平的图像分割方法,如均值漂移[5,6]、分水岭[3]、水平集[15]和超像素[28],通常将图像分割成许多小区域。虽然可能存在严重的过度分割,但是这些低层次的分割方法为后续的高层次操作(如区域合并)提供了良好的基础。例如,在[17,18]中,Li等人将graph cut与
该工作由中国国家科学基金理事会(National Science Foundation Council of China) 60532060和60775020基金资助。
相应的作者。
电邮地址:jf_ning@sina.com (J. Ning), cslzhang@comp.polyu.edu.hk
(L. Zhang), csdzhang@comp.polyu.edu.hk (D. Zhang), ckwu@xidian.edu.cn (C. Wu)。
0031-3203/$ -见front mattercopy;2009爱思唯尔有限公司保留所有权利。
为了获得更好的分割输出,分水岭预分割将分水岭分割后的区域作为图割节点,而不是原始图像中的像素点。均值漂移[6]作为一种常用的彩色图像分割方案,在保持目标边缘信息良好的同时,比分水岭具有更少的过分割(图1a为例)。由于较少的过度分割,所提出的区域合并方法所利用的每个区域的统计特征可以得到更强的鲁棒性计算,并可用于指导区域合并过程。
提出了一种基于均值漂移初始分割的交互式区域合并方法。在提出的方案中,交互信息作为标记引入,由用户输入,粗略地表示对象和背景的位置和主要特征。标记可以是简单的笔画(例如图1b中的绿线和蓝线)。然后,提出的方法将计算不同区域的相似度,并根据所提出的最大相似规则,利用这些标记进行合并。合并过程结束后,从背景中提取目标(图1c为分割结果示例)。
虽然在Meyer的分水岭方案[4]和图割方案[10-12]中使用了将标记引入交互式seg-沉着的思想,但本文首先利用该思想指导区域合并,进行目标轮廓提取。该方法的关键贡献在于提出了一种新的基于最大相似度的区域合并(MSRM)机制
446 J. Ning等/模式识别43(2010)445—456
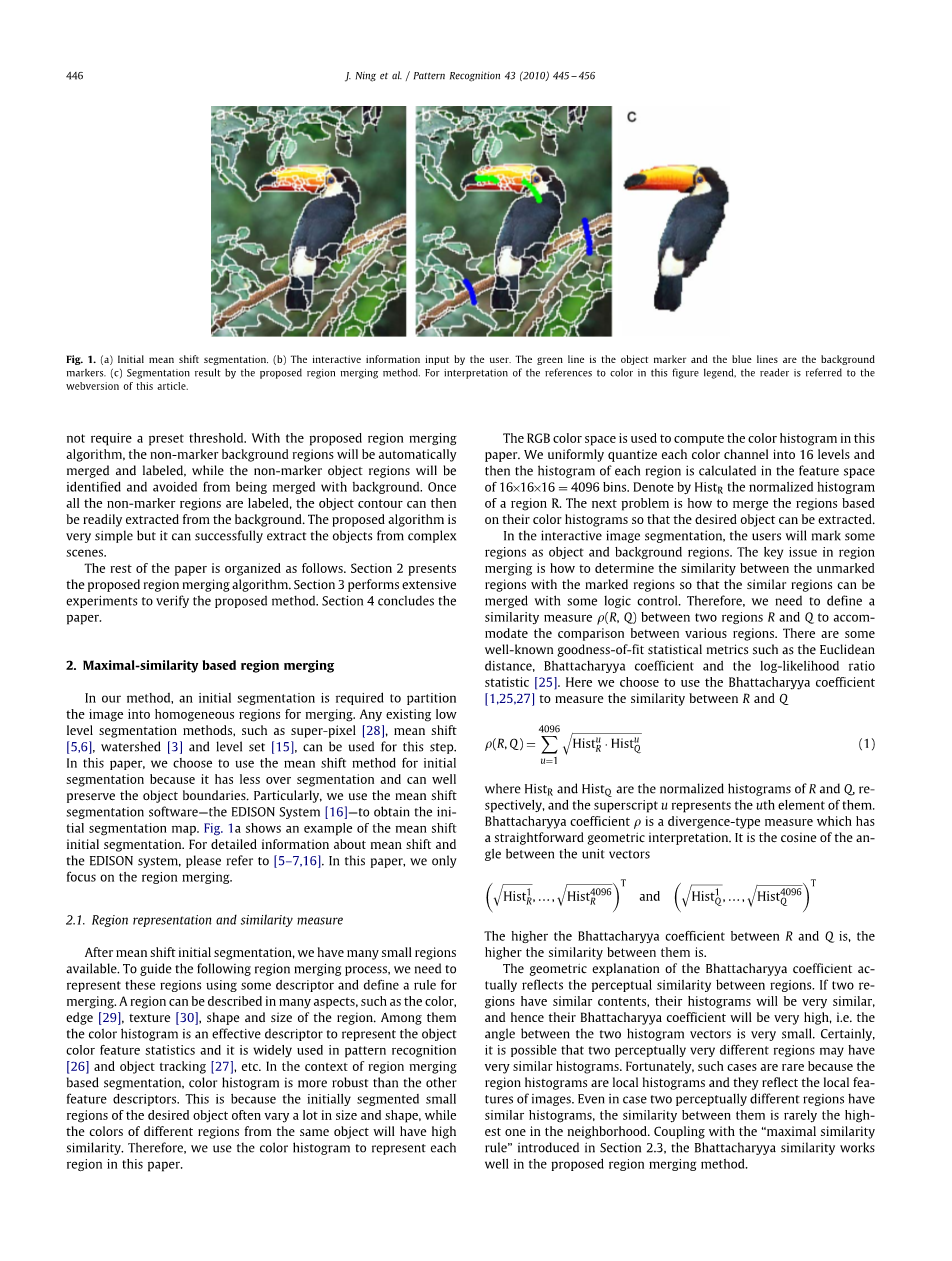
图1所示 (a)初始均值移位分割。(b)用户输入的互动信息。绿线是对象标记,蓝线是背景标记。(c)区域合并方法分割结果。要解释图中对颜色的引用,请参考本文的web版本。
不需要预设阈值。提出的区域合并算法将自动合并标记非标记背景区域,识别非标记目标区域,避免与背景合并。一旦所有的非标记区域都标记好了,就可以很容易地从背景中提取出目标轮廓。该算法简单,但能成功地从复杂场景中提取目标。
本文的其余部分组织如下。第2节给出了区域合并算法。第3节进行了大量的实验来验证所提出的方法。第四部分是本文的结论。
2. 基于最大相似度的区域合并
在我们的方法中,需要一个初始分割来将图像分割成均匀区域进行合并。任何现有的低水平分割方法,如超像素[28],均值漂移[5,6],分水岭[3]和水平集[15],都可以用于这一步。在本文中,我们选择均值漂移法进行初始分割,因为它具有较少的过度分割,并且能够很好地保持目标边界。特别地,我们使用了均值漂移分割软件——EDISON System[16]来获得局部分割图。图1a给出了均值漂移初始分割的例子。关于mean shift和EDISON system的详细信息请参考[5 - 7,16]。在本文中,我们只关注区域合并。
2.1 区域表示和相似性度量
本文采用RGB颜色空间计算颜色直方图。我们将每个颜色通道统一量化为16个层次,然后在16times;16times;16 = 4096个bin的特征空间中计算每个区域的直方图。表示被嘘R 区域r的归一化直方图。下一个问题是如何根据区域的颜色直方图将区域合并,从而提取出想要的对象。
在交互式图像分割中,用户将一些区域标记为目标区域和背景区域。区域合并的关键问题是如何确定未标记区域与标记区域之间的相似性,使相似区域可以通过某种逻辑控制进行合并。因此,我们需要定义两个区域之间的相似性度量(R, Q)来适应不同区域之间的比较。有一些著名的拟合优度统计指标,如欧氏距离、巴塔查里亚系数和对数似然比统计[25]。这里我们选择使用Bhattacharyya系数[1,25,27]来度量R和Q之间的相似性
(1)
在HistR 和HistQ 分别为R和Q的归一化直方图,上标u表示它们的uth元素。巴塔查里亚系数是一种发散型测度,具有直观的几何解释。它是单位向量之间的角的余弦
在均值平移初始分割后,我们得到了许多可用的小区域。为了指导下面的区域合并过程,我们需要使用一些描述符来表示这些区域,并定义用于合并的规则。一个区域可以从很多方面来描述,比如颜色,边缘[29],纹理[30],区域的形状和大小。其中,颜色直方图是表示对象颜色特征统计量的有效描述符,在模式识别中得到了广泛的应用
- 以及对象跟踪[27]等。在基于区域合并分割的背景下,颜色直方图比其他特征描述符具有更强的鲁棒性。这是因为最初分割的目标小区域在大小和形状上往往相差很大,而同一目标不同区域的颜色会有很高的相似性。
R和Q之间的Bhattacharyya系数越高,它们之间的相似性越高。
巴塔查里亚系数的几何解释真实地反映了区域间的感知相似性。如果两个区域的内容相似,它们的直方图就会非常相似,因此它们的Bhattacharyya系数就会非常高,即两个直方图向量之间的夹角非常小。当然,两个感知上非常不同的区域可能有非常相似的直方图。幸运的是,这种情况很少见,因为区域直方图是局部直方图,它们反映了图像的局部特征。即使两个感知不同的区域具有相似的直方图,它们之间的相似性也很少是相邻区域中最高的。结合2.3节介绍的“最大相似规则”,Bhattacharyya相似度在该区域合并方法中工作良好。
|
J. Ning等/模式识别43(2010)445—456 |
RGB/Bhattacharyya描述符是一种非常简单但有效的表示区域和度量它们相似性的方法。在目前流行的基于内核的对象跟踪方法[27]中,该方法已成功地用于测量目标模型和候选模型之间的相似性。但是,需要强调的是,在区域合并方案中也可以采用其他颜色空间,如HSI颜色空间,以及直方图向量之间的欧式距离等距离度量。在第3.3节中,我们分别使用HSI颜色空间和欧几里德度给出了例子。结果与使用RGB/ Bhattacharyya描述符的结果相似。
2.2 对象和背景标记
在交互式图像分割中,用户需要在概念上明确目标和背景。与[10,13,17]类似,用户可以通过绘制标记输入交互信息,标记可以是图像上的直线、曲线和笔画。因此,在对象标记内具有像素的区域称为对象标记区域,而在背景标记内具有像素的区域称为背景标记区域。图1b通过简单的线条展示了对象和背景标记的示例。我们使用绿色标记来标记对象,而使用蓝色标记来表示背景。请注意,通常只有一小部分的对象区域和背景区域将由用户标记。实际上,用户需要的输入越少,交互算法就越方便和健壮。
在对象标记后,每个区域将被标记为三类区域之一:标记对象区域、标记背景区域和非标记区域。为了完全提取出目标轮廓,我们需要自动为每个非标记区域分配一个正确的标签,要么是目标区域,要么是背景区域。为了方便后面的推导,我们用M表示o 和MB 分别表示标记对象区域集和标记背景区域集,用N表示非标记区域集。
2.3 基于最大相似度的合并规则
在对象/背景标记后,由于用户只显示了对象/背景特征的一小部分,如何从背景中准确提取对象轮廓仍然是一个具有挑战性的问题。传统的区域合并方法是将两个相似度超过预设阈值的相邻区域合并[14,6.3章]。这些方法在自适应阈值选择方面存在困难。一个大的阈值会导致属于对象的区域合并不完整,而一个小的阈值很容易导致过度合并,即一些对象区域被合并到背景中。此外,很难判断该地区的并购进程何时应该停止。
对象和背景标记分别提供了对象和背景的一些关键特征。与基于图割和标记的分水岭[4]相似,其中标记是算法的种子和起点,本文提出的区域合并方法也从初始标记区域开始,所有非标记区域将逐步标记为目标区域或背景区域。[17]中提出的图割与基于分水岭的初始分割相结合的延迟捕捉分割方法实际上是一种区域合并方法。它由一个最大流量算法[11]控制。提出了一种基于自适应最大相似度的融合机制,在目标和背景标记的指导下识别所有非标记区域。
设Q是R的邻域,用S表示macr;Q ={SiQ }i=1,2,...,q Q的邻域集合。Q与所有its之间的相似性
相邻地区,即。 (Q,SiQ ), i = 1,2,hellip;问,计算。很明显,
R属于Smacr;Q 。如果R和Q之间的相似性是所有相似性中最大的(Q, S)iQ ),我们将合并R和q。定义合并规则如下:
(2)
合并规则(2)非常简单,但它为拟议的区域合并过程奠定了基础。的一个重要优势
- 它避免了合并控制中相似阈值的预先设置。虽然“max”是一个对异常值敏感的算子,但我们通过实验发现,它在我们的算法中工作得很好。这主要是因为直方图是局部区域的全局描述符,对噪声和小的变化具有鲁棒性。同时,Bhattacharyya系数是两个直方图矢量的内积,对噪声和变化具有较强的鲁棒性。
标记区域只覆盖对象和背景的一小部分。那些没有被用户标记的对象区域,即非标记对象区域,应该被标识出来,不能与背景合并。由于它们来自同一对象,非标记对象区域与标记对象区域的相似性通常要高于背景区域。因此,在自动区域合并过程中,非标记目标区域被识别为目标的概率较高。
2.4 合并过程
整个MSRM过程可以分为两个阶段,重复执行,直到没有新的合并发生。我们的策略是合并尽可能多的背景区域,同时避免合并对象区域。一旦我们合并了所有的背景区域,就相当于提取了想要的对象。文献[22,23]采用了两步策略构建图像金字塔。与[22,23]不同的是,该策略以图像分割为目标,以用户输入的标记为指导。
在第一步中,我们尝试将标记背景区域与其相邻区域合并。对于每个区域Bisin;MB,我们形成它的邻域S的集合macr;B = {i}i=1,2,...,r<!-- 剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20566],资料为PDF文档或Word文档,PDF文档可免费转换为Word

