
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
第6届IEEE RAS / EMBS国际生物医学机器人与生物电子学大会(BioRob)
2016年6月26 - 29日,新加坡UTown
FlexSEA执行:高级运动控制器的可穿戴机器人应用
Jean-Franccedil;oisDuval,Hugh M. Herr,IEEE成员
Center for Extreme Bionics,MIT Media Lab,Cambridge,MA
摘要: 穿戴式机器人,如动力假肢和活动外骨骼,经常依靠电动机进行致动。仿真生物关节角度和扭矩曲线需要特殊传感器,高峰值功率和高级实时控制。 安全是最重要的,需要故障安全电路以检测和纠正有问题的情况。 更小,更轻电路可以导致更高效和负担得起的机器人。 很少商用电机驱动器适应所有这些要求。在本文中,我们提出了FlexSEA-Execute(图1),FlexSEA的高级运动控制器部分灵活,可扩展的电子架构设计可穿戴机器人应用程序。在36cmsup3;和34.8g,这种基于PSoC的设计集成了8A / 25A(连续/脉冲)有刷/无刷电机驱动器,安全协处理器,多点RS-485,应变计放大器,6轴姿态感知单元(IMU),USB和可编程扩展连接器。
关键词: 嵌入式系统,控制,电力电子,无刷电机,可穿戴机器人
1 引言
可穿戴式机器人可用于替代受试者的患病肢体[1],或者它们可用于增强受试者的身体健康[4]。 大多数假体的基本目标是再现他们替换的生物肢体的功能; 它们的质量,体积和“行为”必须与他们的生物对应物相似[3]。 用于康复,辅助或增大的外骨骼倾向于以仿生方式施加功率[5]。 精确的运动控制是实现这些目标的基础。
可穿戴式机器人可以是被动的(不包括电池,弹性和耗散元件),准被动(不使用电源的净功,可使用离合器等主动元件)或主动元件(可通过执行器施加正功率)。 被动或准被动外骨骼可以比有源装置更轻。 他们可以降低特定行为的代谢成本,如步行[7]或跳跃[8]。 然而,在没有驱动力量的情况下去抵消增加质量带来的负面作用,这是具有挑战性的[5]; 许多设备包括电源和促动机。这项工作侧重于主动设备,更具体地说,是对于电机驱动控制的研究设计。
质量和体积是可穿戴机器人的重要约束。超过马达驱动器本身的质量,其物理尺寸对总系统质量有显著影响; 大电路将需要更大的外壳。在末端增加的远端质量比近端质量需要更多的代谢能量[9],并且根据穿透因子方程,可穿戴式机器人的功率与重量之比对于增强项目特别重要[5]。研究人员用于避免功率与质量比率问题的一种策略是使用板外(off-board)的方法来减少开发过程并且需要更复杂的设备(即外部,台式)电机和电子设备[6] [11]。这通常将实验限制在固定的实验室设置。
自主的,主动的可穿戴机器人主要使用电池用于能量存储,并且电动机是机械功率的主要来源。 他们可以刷[2] [10] [12]或无刷直流(BLDC)[1] [3] [5]。后者的较高的功率重量比是有益的,但是其代价是更复杂的功率电子器件。具有高扭矩常数的电动机可以用于减小获得期望的关节扭矩和速度所需的传动比。一种通常用于研究的无刷电机是Maxon EC-30(30501x,Maxon Motor,Sachseln,CH)[1] [3] [5]。其低电感,对于24V版本(型号305013)为16.3mu;H,可以成为电机驱动器的主要电感器,某些型号需要外部电感器。它们增加了系统的质量,体积和低效率。
所使用的控制算法倾向于模拟自然关节运动,他们必须适应变化的环境条件。机器人状态和环境参数由传感器测量。 可扩展电子架构(SEA)[13],通常用于可穿戴式机器人[1] [5],可能需要比电动机单独更多的传感器。 力和扭矩可以用力敏感电阻器[3],连接到弹簧[2] [4] [9]和应变计[3] [4] [6] [10]的电位器或编码器测量。 接头角度由光学编码器[6]和电位计[10]测量。加速度计和陀螺仪(有时集成在IMU中)也用于估计角度或步态周期[3] [5] [14]。 可穿戴式机器人中使用的控制算法不同于工业应用中使用的控制算法。 因此,电机驱动器[3] [12]上的控制回路并不总是闭合。 在运动控制器上集成更多外设,计算能力和传感器可以减少应用所需的电路板数量。 它通过消除电路间通信的延迟,以及通过减少连接器的数量可靠地提高性能[15]。
对于连接到人类的可穿戴式机器人,安全性和可靠性是主要的功能要求[12]。 这对于医疗装置尤其如此。 需要检测故障并采取纠正措施将系统置于安全操作模式。
通过仔细分析传感器,致动器和计算模式之间的可穿戴机器人需求,将证明可以实现适用于过多的可穿戴式机器人研究程序的运动控制器设计,并且其可以减少设计时间并改进设备功能。
图1 FlexSEA-Execute 0.1安装在其可选的散热器上
2 要求
基于可穿戴式机器人电机控制的特殊性和目前可用的电动机,我们编译了要求:
(1)电机类型:有刷和无刷直流
(2)四象限(4Q)操作,支持再生电流
(3)电压(最小):24V DC
(4)功率(最小):平均100W,峰值300W
(5)电流(最小):5A平均值,20-30A峰值
(6)快速(2Mbps最小)多点串行接口
(7)高脉冲宽度调制(PWM)频率,支持低电感电机,无需额外组件
(8)精确,高带宽电流控制,最小。10kHz采样频率。
(9)集成应变片/称重传感器接口
(10)集成6轴IMU
(11)扩展端口支持附加输入和输出:模拟输入(最小12bits),数字输入和输出,串行通信(UART / SPI /Isup2;C)
(12)内置安全检测和校正电路(断电,断开电池,软件故障,过/欠电压,过温等)
(13)体积小于50cmsup3;,最长尺寸不到60mm,重量在50g以下
(14)无需外部电路或组件
(15)仅被动冷却,无需风扇
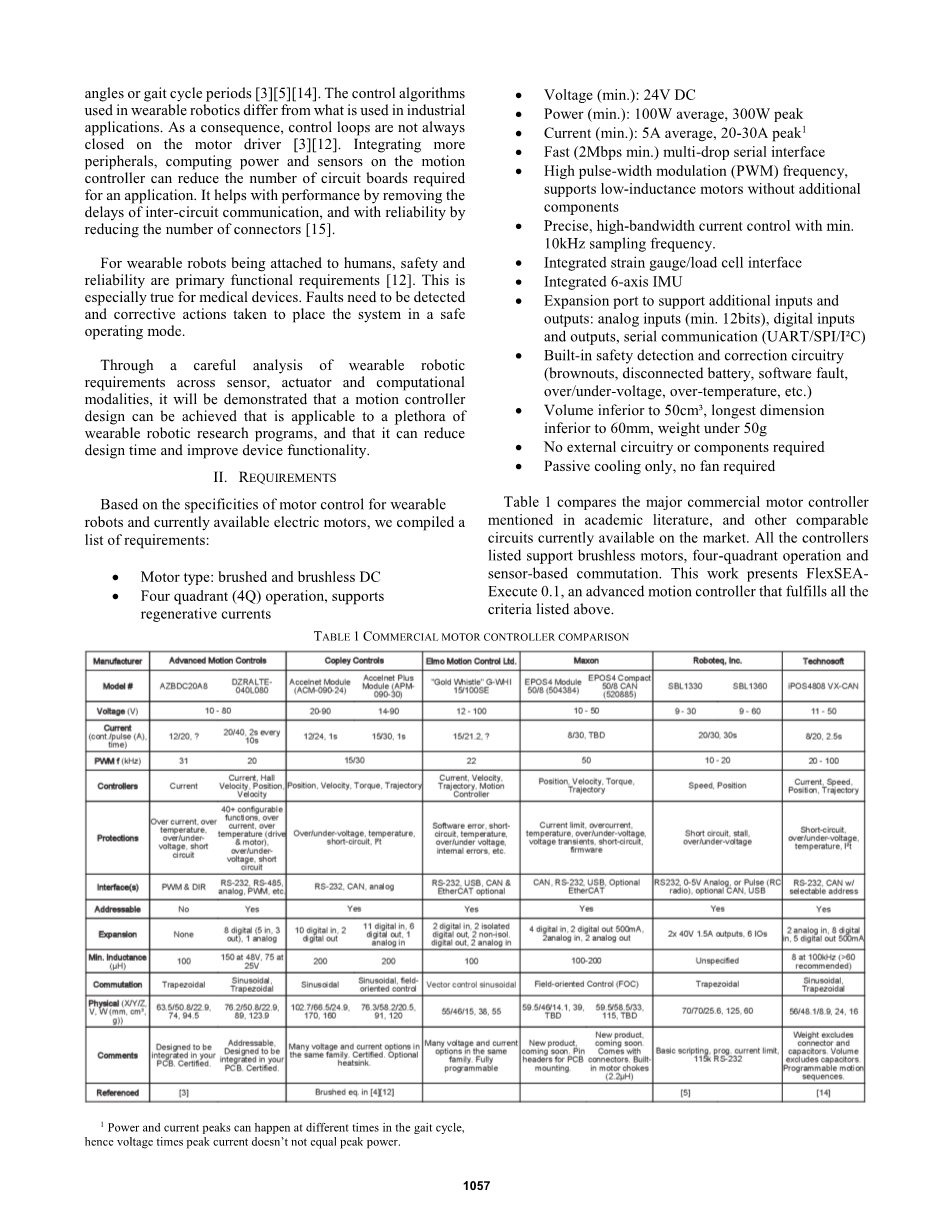
表1比较了学术文献中提到的主要商用电机控制器和市场上目前可用的其他可比较电路。 所有列出的控制器支持无刷电机,四象限运行和基于传感器的换向。 这项工作提供FlexSEA-Execute 0.1,一个高级运动控制器,满足上面列出的所有标准。
表 1商业电机控制器比较
(功率和电流峰值可以在步态周期中的不同时间发生,因此电压乘以峰值电流并不等于峰值功率。)
3 硬件设计
在其核心,FlexSEA-Execute板是专为机器人和假肢应用的BLDC电机驱动器。 高级硬件设计目标是最大化系统集成(小物理尺寸,大量集成外设和接口,支持外部输入和输出设备),通过使用快速多点通信接口实现快速通信和可连接性 ,并具有内置的安全功能。 图2显示了FlexSEA-Execute 0.1板的逻辑组织。 橙色是原理图,灰色是某些纸张上存在的子电路。 图3突出显示了安全功能。 这些电路,子电路和附加特征在下面的A-H部分中讨论。
A.微控制器和安全协处理器
选择赛普拉斯半导体可编程片上系统(CY8C5888AXI-LP096,Cypress Semiconductor,San Jose,CA)作为主控制器。 与大多数用于此应用的IC不同,它不是针对电机控制或DSP进行优化的微控制器[19],而是一个混合解决方案,包括80MHz ARM Cortex-M3微控制器,以及集成在一个芯片中的模拟和数字可重配置模块 。 它允许更加紧密地集成模拟外设,高性能控制回路,最小的CPU干预,以及在扩展IO方面比传统微控制器具有更多的灵活性。
为了防止用户错误创建危险情况或从故障中恢复,第二控制器(CY8C4245LQI-483,Cypress Semiconductor,San Jose,CA)用作安全协处理器。 图3显示了通过第二个处理器的PWM线。 它可以完全控制电源桥,并且可以将系统置于故障安全模式。 看门狗时钟(WDCLK)线用于向协处理器通知主微控制器的问题。 Isup2;C用于交换信息和传感器值。
B.功率桥和电流检测
电路上有三个半桥,每个具有两个MOSFET和一个栅极驱动器。选择BSC014N06NS MOSFE(Infineon Technologies,Neubiberg,DE)用于其小型工业标准封装(QFN 5x6),可用性,价格,低漏源电阻(RDS(ON))和低栅电容。作为安全边际,选择额定至少两倍总线电压(28V Max)的MOSFET。在60V时,BSC014N06NS在大电感尖峰情况下得到保护。选择IRS21867(International Rectifier,Leominster,MA)栅极驱动器是因为它们的鲁棒性,特别是对于负瞬态电压的容限。栅极电阻值通过仿真和在线测量在实验上选择。 6.8Omega;和3.3Omega;(分别为高端和低端)在快速跃迁和最小振铃之间提供了良好的折衷。编程的13个周期的死区时间为我们在互补MOSFET的跃迁之间提供了有效100ns(从栅极阈值电压计算)以及低于2V的负下冲。放置和布线已经仔细优化,以最小化寄生电感并改善散热。
每个半桥具有5mOmega;低端电流检测电阻。 PSoC 5内的可编程模拟模块用于创建只有3个外部的plusmn;20A电流传感器组件(放大器反馈电阻和低通滤波电容器)。
图 2 系统图
C.沟通
控制器局域网(CAN)[18]和以太网控制自动化技术(EtherCAT)通常用于机器人。CAN是廉价,健壮和安全的,但它的1Mbps带宽对于采用多个电机驱动器和快速刷新率的应用而言可能是一个重要的限制。EtherCAT提供100Mbps,但它需要一个主控制器,特殊电缆,连接器和特定应用集成电路(ASIC)。它们增加了成本,体积和系统的复杂性。 RS-485通常与旧技术有关[17],但其简单,成本低,鲁棒性和速度(理论上可达100Mbps; 在我们的应用程序中可达到4Mbps)使其成为FlexSEA的一个有趣的选项,特别是在多点配置。 三个收发器用于接受不同的通信策略。从1到3个双绞线可以用于实现异步半双工(默认),同步半双工,异步全双工或同步全双工数据交换。
D.连接器
两个电源输入信号(电池电压和地)并且三个电动机相使用通孔焊盘电路板。 它们可以容纳高达AWG16的电线。可以使用串联连接器,如安德森Powerpole。 这种设计选择以及它保持电路尺寸小给了机器人设计师在机械集成方面的最大灵活性。
一个40位Molex PicoClasp(501571-4007,Molex,Lisle,IL)连接器用于所有其他信号:RS-485差分对,应变计输入,霍尔效应传感器,编码器和12个扩展信号。 其中8个可以是模拟输入(模数转换器(ADC):12位SAR,8-20位Sigma Delta)。 串行通信接口,如UART,Isup2;C和SPI可以软件链接到连接器,允许连接外部电路。
E.传感器
许多控制策略依赖于力/扭矩传感[14]。 在电动机中,转矩与电流成比例,但是当变速器被放大时它是间接测量。 转矩常数也可随温度变化。 应变压力计和称重传感器可用于精确、直接的力测量。 它们的输出信号通常在毫伏数量级。 需要高放大,并且来自电动机和功率电子器件的电磁噪声可能成为问题。 FlexSEA-Execute具有abuilt-in两级差分放大器。 偏移和增益可编程(半电源plusmn;20%,500 lt;增益lt;10000)。 在20kHz滤波器具有44dB衰减的低通共模滤波器滤波器换向噪声,允许传感器在电机附近使用。 弹簧偏转力传感器(或任何其他模拟传感器)可以通过扩展连接器上的样品输入端提供。
加速度计和陀螺仪可用于测量机器人在闸门循环中的位置,脚跟撞击或关节角度。 一个6轴IMU(MPU-6500,InvenSense,Boston,MA)(plusmn;2至plusmn;16g,plusmn;250〜plusmn;2000°/ s)。 总线电压,相电压,微控制器温度和功率桥温度以检测异常情况。
F.保护电路
如果出现主要问题,例如断开电池,假体必须置于故障安全模式以保护其佩戴者。 掉电保护电路(通过二极管隔离的电容)保持微控制器在总线掉电后几毫秒供电,允许他们将系统置于安全状态。短路电动机的引线提供阻尼是一个比自由移动关节更安全的情况。消耗模式MOSFET用于在缺少电源或控制信号的情况下将电机引线短路在一起。 安全协处理器必须主动产生负电压以禁用该保护,使得系统本质上是安全的。
在静电放电(ESD)的情况下,所有通过扩展连接器到外部世界的信号都有钳位二极管和串联电阻来保护。 一个单向瞬态电压抑制器(TVS)用于在过压或反向的情况下保护 VB总线极性。
G.印刷电路板(PCB)和散热
将所有必需的电路集成在小体积中需要仔细组件放置和布局。 无铅表面贴装封装,具有细间距和连接密度要求小的迹线宽度和间距为5密耳。这个防止使用2Oz(或更多)铜作为电源电子。设计了具有盲孔的6层PCB,每个电源路径使用最多3层。双面组装。混合大功率电子和灵敏模拟同一电路上的放大需要特别注意信号完整性。 使用多个通孔从中提取热量PCB走线和平面,并将其带到底层。 一个平的未填充表面用于获得与散热器连接的低热阻。在PCB和散热器之间使用转印材料(Laird Technologies A15372-02,0.02℃/ W,127mu;m)隔离相变热。
H.杂项
该设计的其他特性包括一个8位20kHz输出的离合器驱动器和一个指示板状态的RGB LED。两个开关模式电源(SMPS)用于为栅极驱动器提
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137123],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

