
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
增强现实和虚拟现实对物体触觉感知影响的研究
Yoren Gaffary1, Ferran Argelaguet1, Anatole Leacute;cuyer1,Benoit Le Gouis2, Bruno Arnaldi2, Maud Marchal2
- Inria/IRISA
- INSA Rennes/IRISA
摘要:
针对在AR场景和VR场景中触摸物体给人的感觉是否相同的问题,本文研究并比较AR场景和VR场景对触觉感知的影响。研究员设计了一个基于微软全息透镜和触觉力反馈设备的实验环境,参与者在该实验环境下通过按压虚拟活塞,依次感受其在两种环境下的刚度差异。结果显示,在这两种环境下的触觉感知存在惊人的差异。相较于AR环境,在VR环境中按压虚拟活塞需要更大的力。例如,当AR环境和VR环境中的活塞具有相同刚度时,60%的参与者认为VR中的活塞更硬,需要更大的力按压。总的来说,我们的实验为研究AR和VR中的触觉感知打开了新的视角,并为未来针对潜在感知偏差的研究铺平了道路。
关键词:增强现实;虚拟现实;触觉;感知;刚度;心理物理学研究
- 引言
虚拟现实和增强现实受到越来越多的普通群众和研究者的关注。AR和VR依赖相似的技术,但它们提供不同类型的视觉反馈。二者之间的主要区别在于用户眼前是否存在真实物体。但是现在我们还不清楚这种区别是否会影响用户的感知。换句话说,AR中的感知和VR中的感知有多少不同?
AR中的许多视觉因素,如环境、光照、显示设备,甚至用户[12]都已经被广泛研究。一些实验发现AR和VR中都存在视觉偏差,如距离远近。但两种环境下的偏差值并不相同,相较来说,AR中的偏差值较小一些。许多早期研究只关注于视觉差异,很少有触觉方面的研究。AR和VR中的触觉感知相同吗?真实物体的存在会影响我们对虚拟对象的感知吗?当你在AR和VR中触摸物体时,我们的感觉一样么?
在这篇文章中,我们研究了AR和VR的显示方式如何影响人类对虚拟物体的触觉感知。我们基于微软全息透镜设计了一项实验,在这项实验中,参与者可以通过力触觉反馈设备按压AR和VR环境中的虚拟活塞并感知其刚度。结果显示,参与者认为在虚拟环境下感知到的虚拟活塞比在增强环境中的更“硬”。
本文的剩余部分如下:在第2节介绍VR和AR的研究现状;在第3节描述研究内容和研究设备;在第4节给出实验结果;在第5节中讨论;在第6节给出总结。
- 研究现状
多年以来,人们已经意识到VR/AR与现实世界的感知存在差异,对其的研究一直是热门领域[18][3][12]。我们发现真实与虚拟环境下存在距离远近的差异[18]——VR中的虚拟物体看起来比实际更近。尽管AR与VR的视觉反馈有很大不同,但是AR中也发现了同样在VR中存在的关于深度和距离的视觉偏差[8]。Knorlein等人[11]发现AR中的延时力反馈能造成虚拟物体摸起来更软的错觉,同时,在VR环境下也发现相似的现象[16]。
我们知道,VR和AR的视觉反馈能够影响人类的力触觉感知[13]。当我们估计虚拟物体刚度的时候,能明显感受到“视觉优势”现象。在早期的一项研究中,Srinivasan等人[19]提出在操纵力触觉反馈设备的时候,弹簧拉伸的扭曲视觉能极大地误导人类对刚度的感知。后来,Lecuyer等人提出基于“视觉优势”现象的“伪触觉反馈”[13][15][14]。他们展示了当使用一个弹性装置时[15],怎样操作视觉反馈设备能够产生强烈的坚硬感。实验员们注意到真正弹簧与伪触觉弹簧之间存在感知差异。与真正的弹簧相比,伪触觉弹簧提供的坚硬感较低。通过心理物理学的方法,他们发现感知偏差值(或平均主观点)大约等于9%。有趣的是,在力触觉感知方面也发现了其他的感知偏差,例如深度或透视现象[21],这种现象意味着人们认为放在更远处的虚拟物体更硬[21]。
这些早期研究关注于如何通过在真实物体上叠加视觉信息来改变对物体的触觉感知。Hirano等人[6]通过在同一个真实物体上叠加不同的纹理信息,成功的影响人们对该物体的刚度感知。有人提出用相似的方法去影响“柔软度”[17]和物体的重量[5]。在一个纯AR环境中,Jeon和Choi[7]展示了如何通过调节力反馈来影响用户的对物体的刚度感知。
VR环境中的刚度触觉感知已经被广泛研究。一些实验通过心理物理学方法中的两种感知变量去研究触觉感知,这两种感知变量是差别感觉阈值 (JND)和 主观相同点(PSE)。JND是两种感觉被认为相同时的值,即差值低于JND的两种感觉被认为相同。PSE是两种不同性质的感觉完全一致时的值。因此,被认为相同的感觉处于以PSE值为中心,2倍JND值为值域的范围内。另外,许多人研究过身体各部位的JND值。例如,Jones等人[9]研究了当与手臂互动时的刚度感知和刚度系数,其JND值高达6.26 N.mm-1;Cholewiak等人[1]研究了手腕的刚度感知系数,JND值高达3 N.mm-1;Gugari等人[4]研究手了指的刚度感知系数,JND值高达0.34 N.mm-1。一般来说,JND值的范围在15%至22%之间[10]。还有一些研究关注于如何增加刚度触觉感知方式。例如,有研究发现振动能够增加柔软感[20]。
据我所知,在此之前没有针对AR和VR环境中的触觉感知差异研究。
- 实验内容及实验设备
本实验旨在研究视觉显示模式的潜在影响,即在VR和AR环境下,人们对虚拟物体(虚拟活塞)触觉感知的差异。更具体地说,我们研究活塞在不同视觉环境下(真实或虚拟)用户对其刚度感知的差异。参与者依次感知并比较全息透镜上两个活塞的刚度(在AR中显示一个活塞,在VR中以显示相同的活塞)。
我们鼓励读者去看随附的详细描述实验内容和实验设备的视频。
-
- 参与者
12位参与者(11位男士,1位女士)参与这项实验,他们年龄在20岁至29岁之间(平均年龄23.7岁,标准偏差3.2)。他们都是习惯用右手的人。
-
- 实验设备
使用微软全息透镜视觉显示器1(一种透视HMD,可以在视野上叠加部分图像,具有内置跟踪功能)显示AR和VR环境中的虚拟元素。
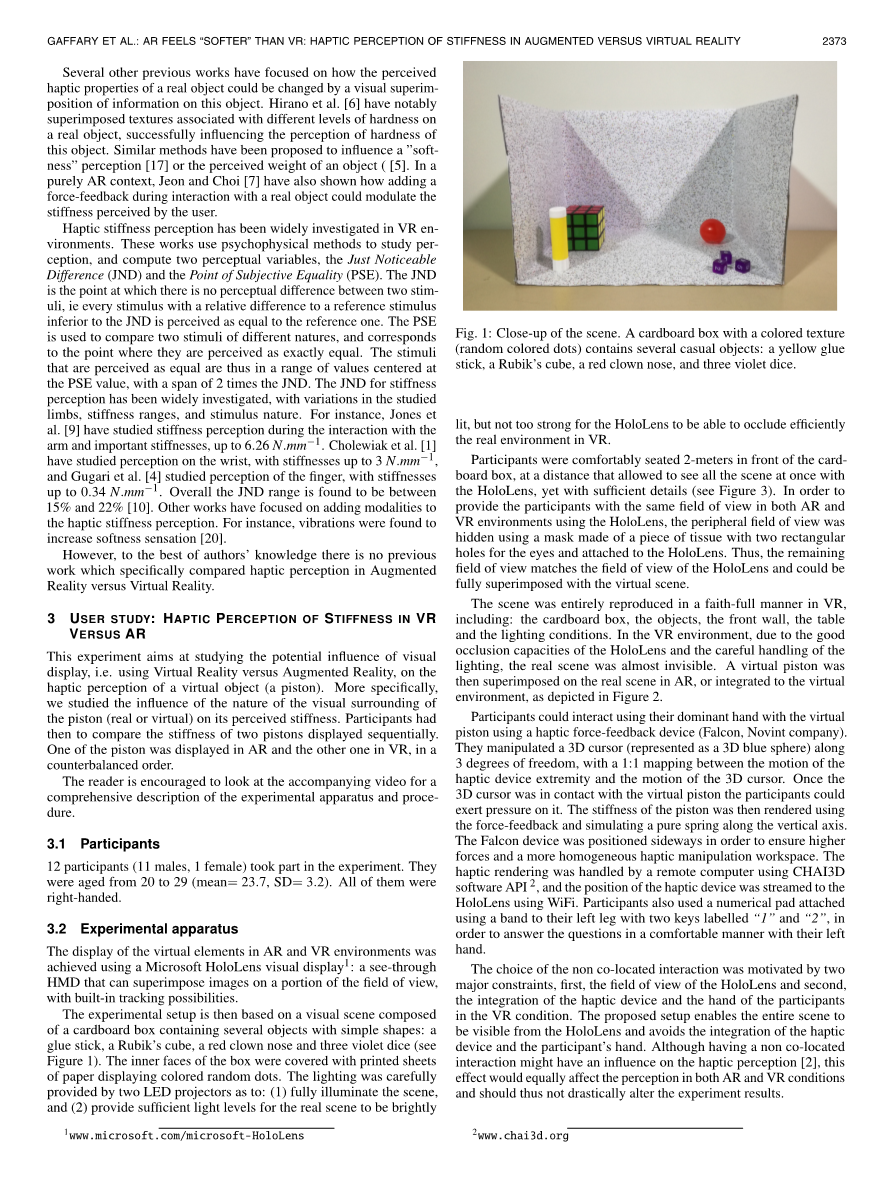
实验基于一个视觉场景,该场景由一个纸板盒子组成,盒子里有几个形状简单的物体:一根胶水棒、一个魔方、一个红色小丑鼻子和三个紫色骰子(见图1)。盒子的内表面被印有彩色随机点的纸覆盖。照明由两个LED投影仪提供,一个完全照亮场景,另一个为真实场景提供足够但不强的亮度,确保全息透镜能有效地遮挡VR中的真实场景。
图1:场景特写。一根黄色胶棒、一个魔方、一个红色小丑鼻子和三个紫色骰子,放在一个带有彩色纹理(随机彩色点)的纸板盒内
参与者坐在离纸盒子两米处的位置,这个距离可以使参与者使用全息透镜看到所有的场景和细节(见图3)。为了使参与者通过全息透镜AR和VR环境的下得到相同的视野,把一个用薄布制成的、有两个矩形眼睛孔的面具贴到全息透镜上遮住边缘视野。此时,视野中剩下的部分与全息透镜重合,并与虚拟场景完全重叠。
AR中的场景信息被完整的复制而来,其中包含纸盒子、物品、墙、桌子和照明环境。在VR环境中,由于全息透镜极强的遮光能力和对光线的细致处理,VR场景完全遮挡真实场景。然后,一个虚拟活塞被注册到AR场景中。(见图2)。
图2:实验条件。(a)在AR环境下,一个虚拟活塞放在真实纸板盒里面。(b)在VR环境下,相同的虚拟活塞放进虚拟场景
图3:实验设备。参与者坐在椅子上,戴着全息透镜装置,使用数字键盘回答两个虚拟活塞哪个更硬的问题(最上面的图)。参与者使用位于他们旁边的Novint Falcon触觉设备与虚拟活塞交互(左下方的图)。用薄布制成的有着两个眼睛孔的面具被固定在全息透镜上,遮住全息透镜不能显示的边缘视野(右下方的图)
参与者可以通过右手操作力触觉反馈设备(Falcon,Novint公司生产)实现与虚拟活塞的交互。参与者通过触觉设备操纵一个虚拟的3D光标(3D蓝色球体),触觉设备的运动和3D光标的运动之间有1 : 1的映射关系。一旦3D光标与虚拟活塞接触,参与者就可以对其施加压力。然后使用力反馈设备得到活塞的刚度系数。Falcon设备被侧向放置,以确保参与者可以发挥更大的力和拥有更大的操作空间。远程计算机使用CHAI3D软件处理触觉再现;触觉设备的位置通过WIFI传输到全息透镜。参与者还可以使用绑在它们左腿上,有“1”和“2”两个键的数字键盘,以便他们舒适的使用左手回答问题。
选择非共存交互主要是受两个条件的限制,第一是全息透镜的视野;第二是VR条件下,触觉设备需要和参与者的手配准。我们设计的实验装置使整个场景可以从全息镜头中看到,并且避免了触觉设备和参与者手的集成。虽然非共存交互可能会影响AR条件下的触觉感知[2],但是它同样会影响VR条件下的感知,因此不会明显改变实验结果。
-
- 实验环境和内容
有两种视觉环境条件。AR条件对应增强现实模式,而VR条件对应虚拟现实模式。此外,还考虑了另外两个条件:
C1:参考活塞的视觉条件。AR参考表示参考活塞在AR中显示,VR参考表示参考活塞在VR中显示。初步测试后,参考活塞的刚度系数在两种情况下均设定为0.11 N.mm-1。
C2:比较活塞的刚度。初步测试之后,选择了五个值,与参考刚度系数相比,分别相差:-16%、-8%、0%、 8%和 16%。
两个活塞的显示顺序是相同的,以避免顺序因素的影响[22]。每对活塞以相同的顺序出现,即先AR中的刚度感知,再VR中的刚度感知。
参与者进行了100次试验,试验按照不同的顺序分为5组,每组20次试验。每组都使用一对相同的活塞,并且每组20次实验项目:2组视觉条件(C1)、5个刚度值(C2)和2个展示顺序(先AR然后VR,或先VR然后AR)组成。
-
- 试验步骤
参与者们首先填写一份简短的表格。在口头解释后,他们进行了5次训练试验,在此期间他们可以适应实验流程。随后,参与者进行五组共100次试验,每次试验的步骤如下(见图4)。
出现一个真实场景(AR条件)或虚拟场景(VR条件)(见图2),两种场景都包括虚拟活塞和3D光标(蓝色球体)。位于活塞上方的红色圆柱代表起始位置(图4a)。参与者在与活塞互动之前,必须到达起始位置并保持1秒钟。之后,圆柱变成绿色(图4b),参与者可以与活塞互动3秒钟(图4c)。实验结束时,一个带有停止信息的面板出现在场景前面,红色圆柱体再次出现(图4d)。当参与者第二次操纵光标到达红色圆柱时,环境条件(AR或VR)以及活塞的刚度都发生了变化。参与者仍需要在红色圆柱(起始位置)内停留1秒钟后才能再次与活塞互动。与活塞互动3秒钟后,停止面板再次出现。在第三次到达起始位置后,回答面板出现,参与者选出自己认为更硬的活塞(图4e)。参与者可以使用绑在他们左腿上的数字键盘输入答案(见图3)。一旦参与者的回答被记录下来,下一次试验就开始了。在一组20次试验之后,参与者可以休息一会儿。
图4:实验过程(在AR条件下显示)。(a)一个红色圆柱体显示操纵光标(蓝色球体)需要到达的起始位置。(b)圆柱变为绿色,这表示参与者可以开始第一次实验。(c)参与者可以
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18132],资料为PDF文档或Word文档,PDF文档可免费转换为Word

