
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
适用于三相感应电机速度控制的可变结构自适应放置控制
摘要:由于其灵活选择控制器设计方法和自适应法(最小二乘法,梯度等),自适应极点放置控制(APPC)是最常见的自适应控制类型。它是以间接方法开发的,作为一个优点,它可以应用于非最小相位设备,因为不涉及植物零点的取消。 可变结构系统理论的使用允许将快速瞬态和鲁棒性聚合到参数不确定性和干扰。在本文中,将可变结构自适应极点放置控制(VSAPPC)应用于感应电动机的速度控制。显示了仿真和实验结果。
关键词:三相异步电机,自适应控制,极点放置控制,变结构系统。
1.介绍
近年来,异步电动机在高性能电动机驱动中已经越来越多地发生直流电动机(Leonhard,1996)。在具有鼠笼式转子的电机的情况下,其主要优点是消除所有滑动电触头,导致非常简单和坚固的结构。感应电机采用各种设计制作成,额定功率为几瓦至几兆瓦。 感应电动机可以在不利的环境中使用,因为它们没有换向器,因此不可能发生火花。随着电力电子技术的发展和低成本的趋势,高速微处理器的出现,感应电动机驱动器已经达到了与直流电机相比的竞争地位。对于直流电机,速度控制可以以简单的方式进行,因为扭矩和通量可以去耦。基于转子磁场方向应用于感应电机的矢量控制(Blashcke,1972)技术(Leonhard,1996; Bose,2000; Cunha,2001),当电机由理想电流源供电时,提供了 扭矩和通量以类似的方式与直流电机。这种技术被称为场定向控制(FOC)。作为d轴参考的转子磁通选择有助于电机转矩和磁通之间的去耦(Leonhard,1996)。在这种控制策略中,不确定性的一个重要因素是随着温度和运行条件而变化的转子时间常数的值,改变了系统的行为。然后,需要采用自适应和/或鲁棒控制的方法,可以将其应用于呈现参数不确定性的系统。
在已知参数情况下流行的一类控制方案是改变极点的控制方案版权所有copy;2007 IFAC并且不涉及植物零取消。这些方案被称为极点放置方案,并且适用于最小和非最小相位线性时间不变(LTI)工厂。极点布置控制定律与参数估计器或自适应法的组合导致适应极点布置控制(APPC)方案,其可用于控制具有未知参数的大类LTI植物。这种技术是基于间接自适应控制方案开发的,其中控制信号是工厂参数估计的函数。
在另一方面,可变结构控制(VSC)方法的根源在于继电器控制,它包括使用开关控制定律作为系统状态变量的函数,并且在其通用配置中,为了限制系统动态 到被称为滑动表面的表面。可变结构体系具有对参数不确定性和干扰的快速瞬态和鲁棒性(在项目计算的范围内,如第4节所示),尽管所有状态变量的测量是必要的,可能是不可取的或可能的 在某些情况下甚至是不可能的(Utkin,1978)。开发了继承VSC质量的控制技术,但只有输出测量值被称为VS-MRAC(可变结构模型参考自适应控制)(Hsu和Costa,1989),其中MRAC积分适应法(Narendra和Valavani,1978 )被切换法律所取代。该算法基于MRAC的直接方法,因此仅限于最小相位植物。为提高电池供电三相电机的控制效果,采用电压矢量控制技术分别控制三相电机励磁电流和转矩电流。 同时,根据转子磁通定向的原理,得到三相电机定子电流矢量测量与控制的目的。 详细介绍了实现电压空间矢量脉宽调制算法的研究。为了简化控制器设计,提出了一种新的控制器,称为间接VS-MRAC(Oliveira和Arauacute;jo,2004),它利用工厂标称参数进行继电器振幅计算,因为它们与物理参数有关 作为电阻,电容,惯性矩等VS-MRAC控制器采用直接和间接方法,已成功应用于直流电机的控制以及感应电机的控制(Oliveira和Arauacute;jo,2004; Cunha等,2002)。
在最近的一项工作中,提出了汇总两种技术特征(即APPC和VSC)的控制器(Silva Jr.和Arauacute;jo,2004)。因此,预期适用于非最小相位设备,对参数不确定性和干扰的快速瞬态和鲁棒性。该控制器被命名为VS-APPC,其中VS-MRAC同样由积分自适应法则替换为切换法。 这种技术的泛化在(Silva Jr.和Arauacute;jo,2005)中提出。Huang and Way(2001)提出的论文显示了在等效极点放置控制中确定开关面的系统方法。在本文中,为了证实其可行性,给出了三相异步电动机的应用。
电感电机的型号
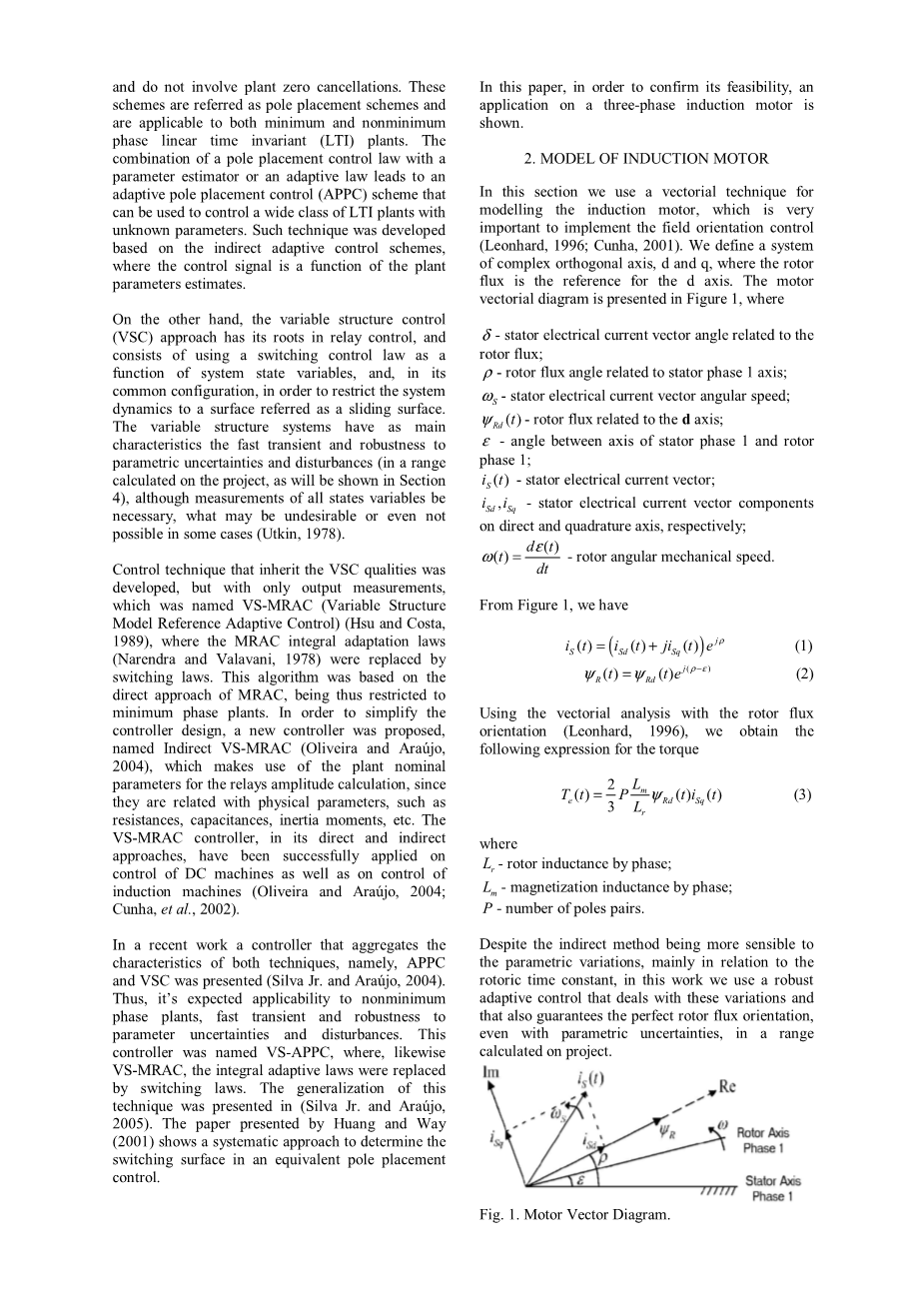
在本节当中,我们使用的矢量技术来建模感应电机,这对于实现磁场定向控制非常重要(Leonhard,1996; Cunha,2001)。我们定义了一个复数正交轴,d和q的系统,其中转子磁通是d轴的参考。 电机矢量图如图1所示,其中:
delta;- 与转子磁通相关的定子电流矢量角;
rho; - 与定子相1轴相关的转子磁通角;
omega;S- 定子电流矢量角速度;
psi;Rd(t) - 与d轴相关的转子磁通量;
ε - 定子相1轴与转子相1之间的角度;
iS(t) - 定子电流矢量;
Sd,iSq - 定子电流矢量分量分别在直接和正交轴上;
|
omega; (t) |
dε (t) |
|
dt |
- 转子的角机械转速。
从图1中可以看出:
|
iS ( t ) i Sd (t ) jiSq (t ) e jrho; |
(1) |
|
|
psi; R ( t ) psi; Rd (t )e j( rho; minus;ε ) |
(2) |
使用矢量分析与转子磁通方向(Leonhard,1996),我们得到以下扭矩表达式:
|
T ( t ) |
2 |
P |
Lm |
psi; |
Rd |
( t ) i ( t ) |
(3) |
|
e |
3 |
Lr |
Sq |
||||
这里:Lr - 转子电感相位;
Lm - 相位的磁化电感;
P - 极数对。
尽管间接方法对于参数变化更为敏感,主要是与转子时间常数相关,但在这项工作当中,我们使用更强大的自适应控制来处理这些变化,并且同时也保证了完美的转子磁通方向,即使是参数不确定性, 也是在项目计算的范围之内的。
图1 电机矢量图
等式(3)中以类似于DC电机的方式描述了感应电动机转矩。电机转矩与直流电机类似。 直流轴上转子磁通矢量的分量等于直流电机中的磁场通量,正交轴上定子电流矢量的分量等于直流电机中的电枢电流。 另外,如果转子磁通的分量保持恒定,那么扭矩只能通过正交轴上的定子电流矢量的分量来控制。
为了保证完美的转子磁通方向,我们需要准确的了解系统的详细的参数。 尽管存在不确定性和脱钩损失,但由于所提出的技术的优越性,我们可以保证得到良好的性能。
POLE PLACEMENT 控制
本节的目的是开发多项式的方法,以便在工厂参数已知的情况下精确地满足极点放置控制目标。
考虑到单输入/单输出(SISO)LTI工厂
作为工厂参数,存在2n个元素,它们是G(s)的分子和分母的系数。
S1, R(s)是度数n是已知的monic多项式。
S2, Z(s)和R(s)是互质和度(Z)lt;n。
假设(S1)和(S2)允许Z和R与需要Z为Hurwitz的MRC(模型参考控制)情况相反,为非Hurwitz。
我们还可以通过使用内部模型原则(Ioannou and Sun,1996)来扩展PPC的目标,包括跟踪,其中需要遵循某类参考信号r。 假设均匀有界的参考信号满
其中Qm(s)是r的内部模型,是具有在jomega;轴上具有非重复根的度q的已知monic多项式,并且满足:S3, Qm(s)和Z(s)是互质的。
我们考虑控制法
其中P(s),M(s)和L(s)分别是q n-1,q n-1 en-1的多项式(L(s)monic)和Qm s)满足(5)和假设(S3)。
将(6)应用于植物(4),得到闭环植物方程
其特征方程 :
得2n q -1 。 现在的目的是选择P和L
对于给定的单位Hurwitz多项式*(),满足2n q-1 。 由于假设S2和S3保证Qm,R和Z是互质的,所以有一个解决方案,使得L和P满足(9),并且该解是唯一的(Ioannou和Sun,1996)。
使用(6),闭环描述:
同样,从(4)的工厂和(6)和(9)的控制规则中我们得到:
因为r是均匀有界的ZM /A 和RM /A适用于稳定的极点,对于任意n q-1的多项式M(s),y和u每当→infin;t保持有界(Ioannou和Sun,1996)。因此,极点放置目标是通过控制规律(6)实现的,而不必对M(s)和Qm(s)施加任何附加限制。 当r = 0时,(10),(11)表示y和u指数收敛到零。
当rne;0时,跟踪误差e = r-y由下式给出:
为了获得零跟踪误差,(12)建议选择M(s)= P(s)来取消(12)中的第二项。 (12)中的第一项被Qmr = 0取消。因此,极点放置和跟踪目标是通过使用控制律来实现的。
如图2所示,使用n q-1个积分器实现
图2 极点放置控制框图
可变结构自适应放置控制
在本节中,显示了(Silva Jr.和Arauacute;jo,2004)中提出的可变结构自适应极点放置控制器的发展。 本文将介绍一期工厂案例。
让我们考虑一下设备
其中参数a,b是常数,并且具有不确定性。 控制目标是选择u,使得闭环装置的极点位于 A* ( s ) s 2 alpha;1* s alpha; 0*的根部,y渐近地跟随。
让amgt; 0.然后,我们可以写(15)为
工厂的模型可以写成
其中a和b分别是a和b的估计(Ioannou和Sun,1996)。 我们将估计误差e0定义为:
因此
与
因为a,b是常数,通过假设,我们有:
现在,我们考虑a和b的以下转换定律
4.1.稳定性证明
让我们选择Lyapunov函数 因此,
这保证e0 = 0是一个全局渐近稳定的平衡点。Lime(t)=0 因为,我们有,
|
t f 剩余内容已隐藏,支付完成后下载完整资料 资料编号:[137262],资料为PDF文档或Word文档,PDF文档可免费转换为Word |
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

