英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
下肢康复机器人通信系统的设计
郭青,江丹
1航空航天学院,2中国电子科技大学机电工程学院,61731成都
guoqinguestc@163.com,bjdan 2002@uestc.edu.cn
关键词:下肢康复机器人,通讯系统,CAN总线,机器人传感器
摘要:设计了一种基于CAN总线的下肢康复机器人通信系统方案,有效地解决了低信号处理问题。 研究了传统的RS232和RS485通信方式的计算能力和数据传输速率,研究了通信系统的特点和拓扑结构。 具体而言,结合CAN总线协议的设计和通信系统的软硬件实现方面,对某机器人传感器进行了设计。
介绍:下肢康复机器人主要利用人体下肢的运动信息,包括人体与外骨骼机器人腿和关节之间的接触力信号。 髋关节和膝关节的角度信号以及脚底的反力信号等,为人体关节的运动提供动力。在传统的康复机器人感知系统中, 运动信息的处理和移动通常由单片机完成[1],康复机器人控制系统的规划和决策通常由上位机完成。此外,有几种通信模式,如RS232和RS485,用于建立上位机与下模块之间的通信。
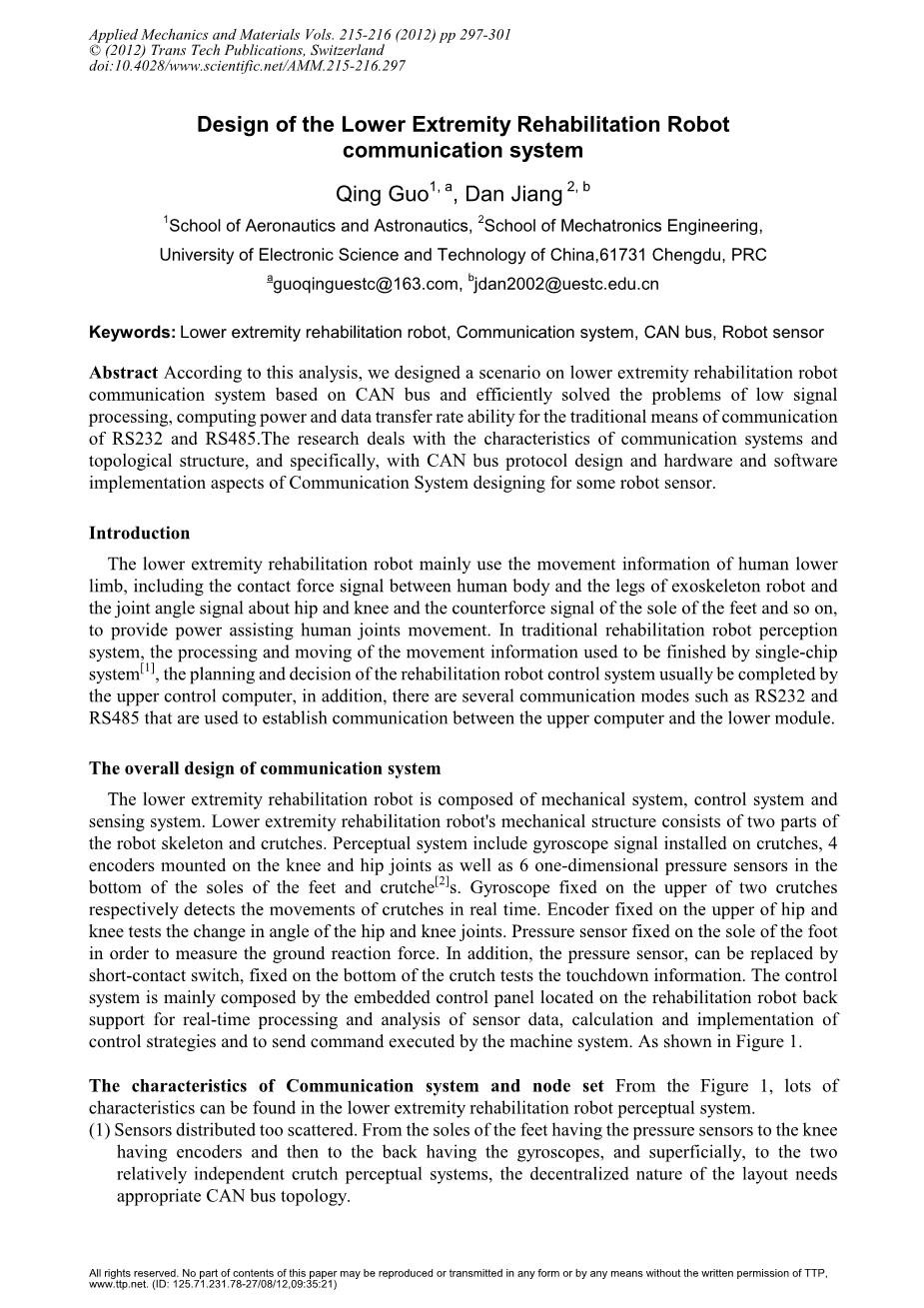
通信系统的总体设计:下肢康复机器人由机械系统、控制系统和传感系统组成。下肢康复机器人的机械结构由两个部分组成。 机器人骨架和拐杖。感知系统包括安装在拐杖上的陀螺仪信号、安装在膝关节和髋关节上的4个编码器以及底部6个一维压力传感器。 脚和拐杖的底[2]。固定在两根拐杖上部的陀螺仪分别实时检测拐杖的运动。固定在臀部和膝盖上部的编码器测试 髋关节和膝关节角度的变化。压力传感器固定在脚底上,以测量地面反作用力。另外,压力传感器,可以用短管代替。 触控开关,固定在拐杖底部测试触地信息。该控制系统主要由位于康复机器人背支架上的嵌入式控制面板组成。 对传感器数据进行实时处理和分析,计算并实现控制策略,并发送指令由机器系统执行,如图1所示。
通信系统和节点集的特点:从图1中可以看出在下肢康复机器人感知系统中可以发现很多特征。
(1)传感器分布太分散。脚底有压力传感器,膝盖有编码器,后面有陀螺仪,表面上还有两个相对独立的拐杖感知系统,布局的分散特性需要适当的CAN总线拓扑。
图1下肢康复机器人的机械结构及传感器分布
(2)传感器需要太多线路。即使采用双线信号传输传感器,每个传感器也需要两根引线,是传感器数量的两倍。这么多的线路将给我们建设和未来的发展以及维修带来更多的困难,但如果使用CAN四线总线传输,就可以解决这个问题。
(3)传感器的位置往往与控制器相距很远,这将导致模拟信号的传输时间较长,从而产生噪声。例如压力传感器分布在两只脚底上,用来输出模拟电压信号。像这样的情况下,需要设置CAN机传感器节点,以便传感器节点收集环境信息并转换成数字信号。,并实时传输到主机控制器。
通信系统的数据源是对节点系统采集的传感器数据的直接感知,通信系统的设计必须适应感知系统的特点。因此,将通信系统分为6个压力传感器节点,分别采集左右脚节点的压力传感器数据,拐杖1和2节点用来采集拐杖底部压力传感器和陀螺仪数据,左右腿膝关节节点采集臀部和膝关节编码器数据。
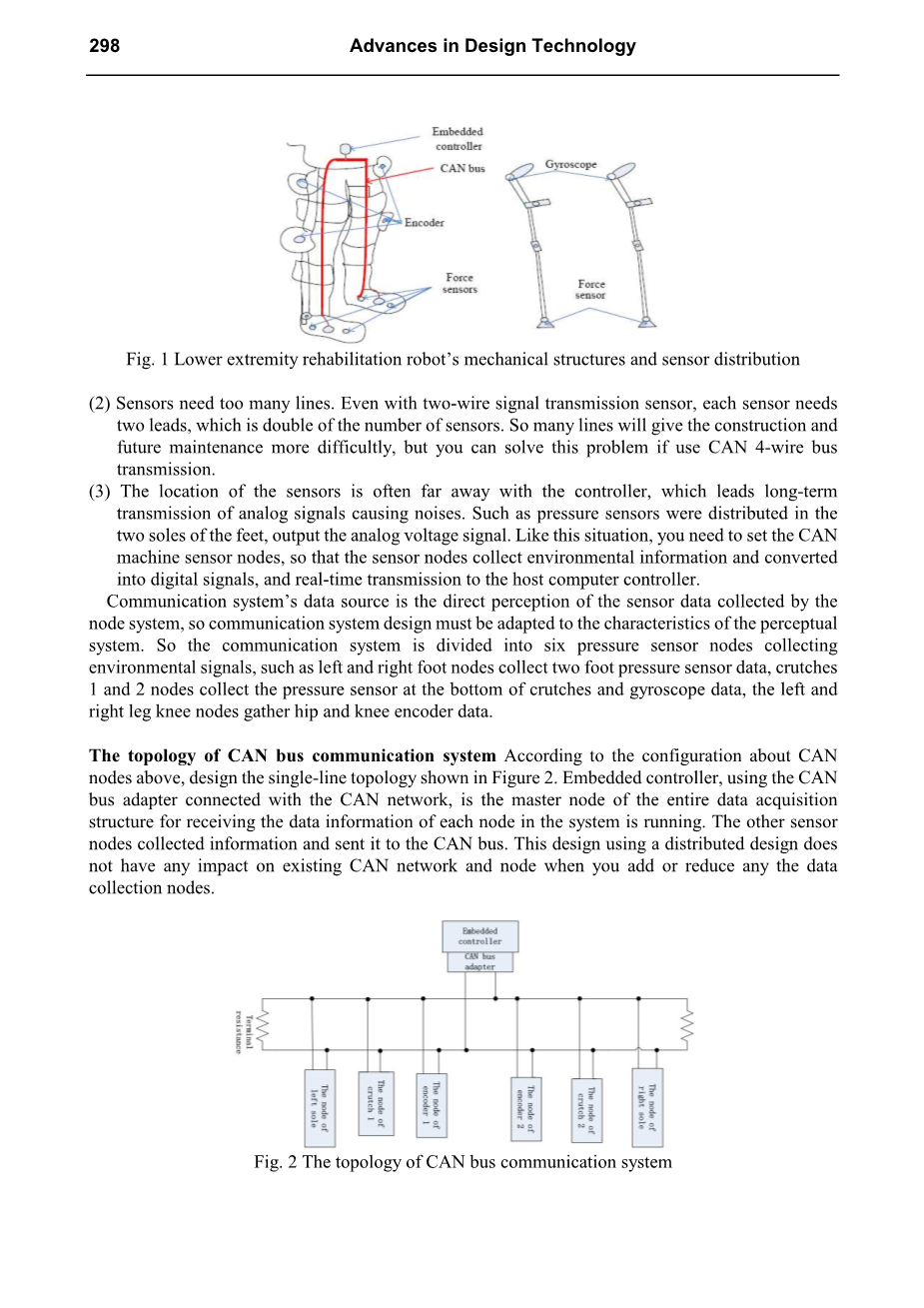
CAN总线通信系统的拓扑结构:根据以上CAN节点的配置,设计了单线拓扑结构,如图2所示。嵌入式控制器使用CAN总线适配器 与CAN网络相连,是整个数据采集结构的主节点,用于接收系统中各节点的数据信息正在运行。其他传感器节点收集信息。 然后把它送到CAN总线上。此设计使用分布式设计,在添加或减少任何数据收集节点时不会对现有CAN网络和节点产生任何影响。
图2 CAN总线通信系统的拓扑结构
通信系统设计:本系统采用主从模式设计.确保传感器发送到中央控制计算机的数据同时进行。
数据传输方式:当您需要收集传感器的数据时,主节点向每个节点发送数据请求广播帧(远程帧),从节点将收集到的环境数据发送到can总线网络。 一旦收到主节点的请求。数据基本上由所有从节点同时采集,从而保证了数据的同步。
标识符的分配:作为本系统不超过10个节点,并考虑到实时性的要求,使得CAN总线标准帧的底层协议中的11个标识符是完美的。 满足本系统的要求。本课题从标识符的分配、整体功能代码的分类、框架设计三个方面进行了设计。
如表1,ID3所示,将标识符分配给ID0是用于指定接收节点或发送节点的地址信息的节点地址。在发送过程中,地址码总是指示感应器的地址。根据上面的标识符分配,可以分配传感器节点地址,如表2所示。剩下的9个ID号可以用作剩余的可用节点,以便扩展使用。
表格1:标识符区域分布
表格2:传感器节点地址分配
|
节点 |
ID3 |
ID2 |
ID1 |
ID0 |
|
主节点 |
0 |
0 |
0 |
1 |
|
左拐杖节点 |
0 |
0 |
1 |
0 |
|
右拐杖节点 |
0 |
0 |
1 |
1 |
|
左足底节点 |
0 |
1 |
0 |
0 |
|
右足底节点 |
0 |
1 |
0 |
1 |
|
左腿节点 |
0 |
1 |
1 |
0 |
|
右腿节点 |
0 |
1 |
1 |
1 |
整体功能代码的分类: ID10对函数代码ID8进行了主节点和从节点的八种不同的功能分类。
主节点:在本系统中,主节点负责接收数据,只需广播发送数据请求帧。在主节点的发送数据包中,功能码的默认值为1000,而且其它临时的功能也应保留。
从节点:在从节点发送的数据包中,功能码表示发送数据帧的数据类型,来自该节点的每个特定定义如表3-5所示。
表格3(左或右)分支节点的功能代码分配
|
ID10 |
ID9 |
ID8 |
功能性说明 |
|
0 |
0 |
0 |
陀螺仪XY和XZ方向加速度 |
|
0 |
0 |
1 |
陀螺仪YZ方向加速度和底部分支的压力数据 |
表格4(左或右)足节点的功能代码分配
|
ID10 |
ID9 |
ID8 |
功能性说明 |
|
足底节点的压力传感器数据 |
表格5:(左或右)腿节点的功能代码分配
|
ID10 |
ID9 |
ID8 |
功能性说明 |
|
0 |
0 |
0 |
臀部和膝关节的编码器数据 |
在上述函数代码设计中,设置ID7帧标记位,它的功能如表6所示。
表格6:ID7功能代码设计
|
ID7 |
含义 |
|
0 |
此框架包含完整的数据 |
|
1 |
此帧为分段帧 |
CAN通信系统接口电路设计如图3所示,CAN总线通信系统的硬件接口电路主要包括电源和JTAG接口电路。主控制器是一种成本低廉、结构简单、易于编程的ATMEGA 16单片机,它用于初始化can控制器MCP 2510,并与can总线适配器进行数据交换。 对CAN控制器MCP 2510进行控制操作,并处理其他通信任务。
MCP 2510使用SPI接口与主机ATMEGA 16单片机通信,只需四条线即可。为了提高系统的实时性,我们采用中断的方式来传输数据, 因此MCP 2510 INT引脚与ATMEGA 16 INT引脚相连。中断服务可以通知ATMEGA 16接收第一次从CAN总线发送的数据。CAN总线电路使用PCA82C250收发器作为驱动,它是CAN控制器和物理传输线之间的接口,可以在两条差分电压总线上进行高达1mb/s的波特率传输。 PCA82C250的CANL和CANH分别通过一个电阻连接到CAN总线上,从而保护82C250不受流量的影响。CANH和CANL分别有一个小电容器。 与地线连接,可减少来自总线的高频干扰,具有防电磁辐射的能力。
图3:CAN总线系统电路
CAN通信系统软件实现:ATMEGA 16系统与嵌入式控制面板之间的主要通信权由主节点负责。根据需要,在康复机器人控制任务中,当机器人需要新的传感器数据时,节点立即向CAN总线网络广播一个远程请求帧,然后等待ATMEGA 16系统返回预先建立的数据。在该系统中,主节点每10 ms[3][4]向网络广播远程请求帧。因为CAN总线传输数据的错误率很低,并且 需要的数据量,而且传感器节点所需的数据量太大,这里使用校准来确定接收到的数据是否错误,如果错误,则使用默认的无效值替代,不需要重新发送。程序流程图如图4所示。
子程序入口
接收数据
Y
N
总结:
本文设计并实现了一个基于CAN总线的下肢康复机器人通信系统。基于CAN总线的分布式机器人本体拓扑结构具有可靠性,各传感器节点与嵌入式控制器之间实时、灵活的数据通信,使上位机板能够实时、灵活地获得康复机器人和环境的运行状态,网络信息和穿戴者的运动意图。要实现达到康复机器人的目的,需要对环境进行快速的测试,并及时规划下一步的工作。该通信系统已应用于下肢康复机器人的设计中。实验表明,该系统能够满足上位机嵌入式控制器的监控和程序设计要求。 实时处理环境信息,具有连接单一、可靠性高、安装维护方便等优点。到目前为止,下肢康复机器人还处于实验阶段,通信系统的设计还不完善,如协议中缺乏重传模式,以保证数据传输的正确性和完整性。 在硬件设计中还可以添加OPT耦合器系统,以适应环境的变化。
本工作由中央大学基础科研经费资助(ZYGX2010J116)。
参考文献:
- Du Fupeng, Bi Peng, Zhao ZhiLiang, the application of multi-thread technology in the system of automatic measurement, measurement and testing techniques, Vol. 35(12)(2008), p. 23-25.
- Ji Liming, Wang Taiyong, the remote monitoring system of equipment based on Win socket and component technology, Industrial Control Computer, vol 14(5)(2001), p. 21-23.
- Yao Wancheng, the application technology of VC Excel, Computer and Modernization(2007), p. 64-65.
-
Zhong Hong, Huang Xiaoch
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[23473],资料为PDF文档或Word文档,PDF文档可免费转换为Word

