
英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
图像边缘检测方法: 综述
引言
边缘可能是光线、颜色、阴影和纹理变化的结果,这些变化可用于解决数字图像的深度、大小方向和表面特性。图像的数字分析有助于过滤不必要的信息来选择边缘点。细微变化的检测可能会被噪声混淆,这取决于定义边缘的变化的像素阈值。这些边缘的检测是非常困难和耗时的,特别是当图像被噪声污染的时候。边缘检测是图像处理的主要领域,如特征检测和特征提取的基础和重要工具[1]。
Shashank Mathur 和 Anil Ahlawat [2]提出了一种使用窗口技术的边缘检测算法。这是基于扫描图像的 3 * 3 像素掩模中的模糊相对像素值。他们的技术基于一组模糊条件,通过将像素值与邻近像素进行比较来检查窗口中的像素幅度梯度。
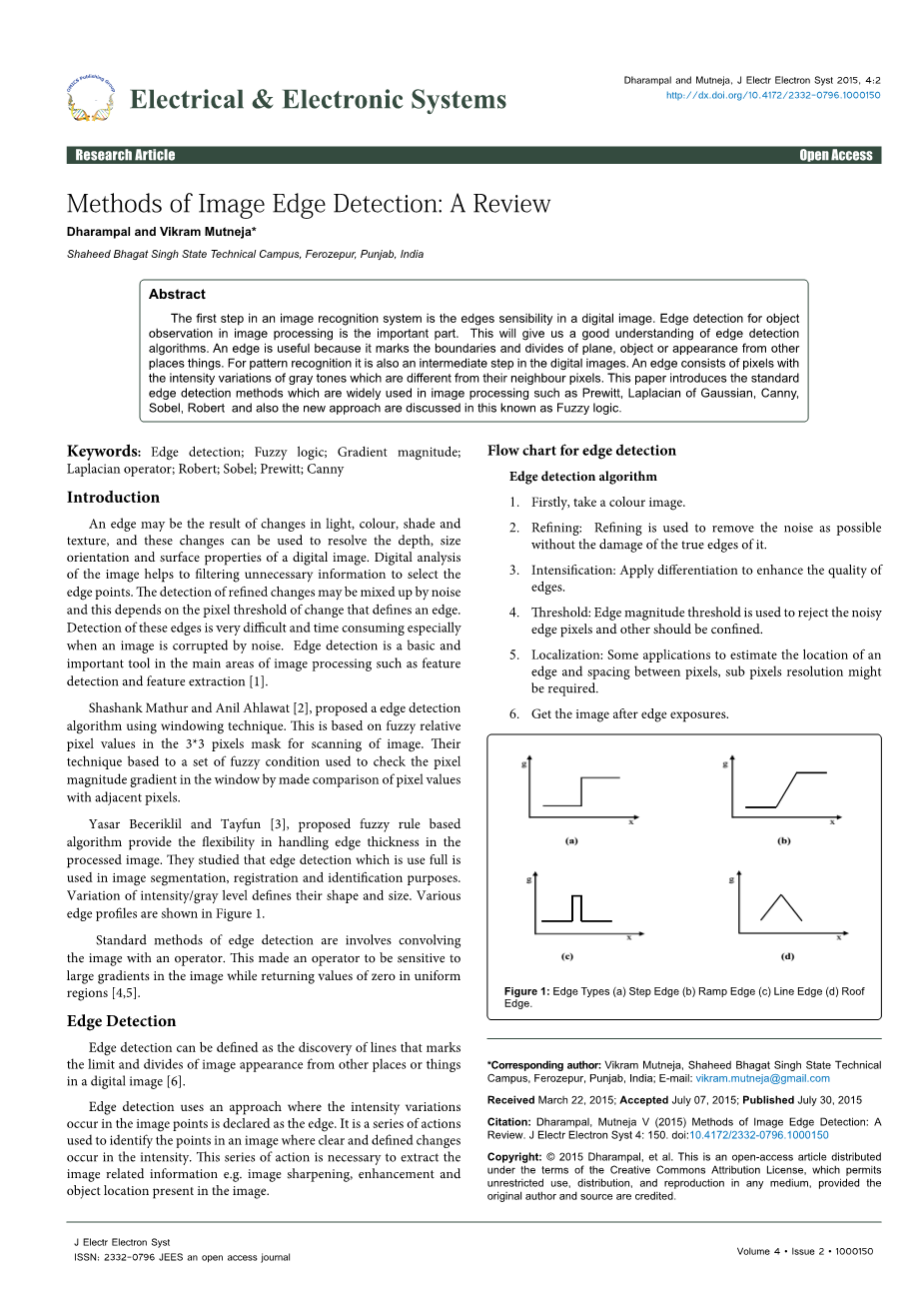
Yasar Beceriklil 和 Tayfun [3]提出的基于模糊规则的图像处理算法在处理图像边缘厚度方面提供了灵活性。他们研究了利用图像分割、配准和识别的边缘检测。强度/灰度的变化决定了它们的形状和大小。各种边缘轮廓如图1所示。
边缘检测的标准方法是用运算器对图像进行卷积。这使得算子对图像中的大梯度很敏感,同时在均匀区域[4,5]中返回的值为零。
边缘检测
边缘检测可以被定义为发现标记图像外观与数字图像中其他地方或事物的界限和分界线[6]。
边缘检测使用一种方法,其中发生在图像点的强度变化声明为边缘。它是一系列用于识别图像中强度发生明确和定义的变化的点的动作。这一系列的动作对于提取图像相关信息是必要的,例如图像锐化、增强和图像中存在的对象的位置。
边缘检测流程图
边缘检测算法
1.首先,获取一张彩色图像。
2. 精炼: 精炼用于尽可能地消除噪音,而不损害噪声的真实边缘。
3. 强化: 应用差异化来提高边缘的质量。
4. 阈值: 边缘幅值阈值用于剔除噪声边缘像素,其他的应该受到限制。
5. 定位: 一些应用程序来估计一个边缘的位置和像素之间的间距,可能需要子像素的分辨率。
6. 边缘曝光后得到图像。
边缘检测方法
边缘检测方法分为两类: 第一类是基于梯度的,第二类是基于拉普拉斯的。
在基于梯度的方法中,通过获取图像的一阶导数来检测边缘。梯度幅度用于计算边缘强度的度量。梯度幅度具有局部方向极大值的特性,有助于计算出在梯度方向[7,8]上的局部边缘方向。
在基于拉普拉斯的方法中,使用图像来计算具有零交叉的二阶导数表达式。一般来说,边缘是通过搜索一个非线性微分表达式的过 零点来找到的。通常对于边缘检测,应用预处理步骤高斯平滑,这通常是一个细化阶段[7,8]。
基于梯度的边缘检测
在数字图像中,基于梯度的方法也称为掩模。用数字掩模计算图像水平或垂直方向的微分近似[6]。
图像的边缘部分,表示灰度值快速变化的位置。图像的一阶导数用于在基于梯度的运算符[4,7]中找出最大值和最小值。在图像处理中,使用梯度一阶导数的大小实现[8]。对于函数 f (x,y) ,作为空间列向量,在坐标(x,y)处的“ f”的微分如下所示[9] :
其中nabla;f是向量的梯度。(x,y)坐标具有最大的变化速率,通常为梯度方向[10]。这可以通过矢量评估来观察到。这里的角度用梯度角度表示(图2)
向量nabla;f的大小,记为M(x、y):
使用平方根运算来逼近这个数量。
图 2: 图像边缘检测的流程图。
开始
完成
通过应用不同的边缘检测算子来检测边缘
将图片转换为灰色图像
输入彩色图像
或者使用,
梯度方向如下:
这里的角度是引用 x 轴来测量的。边缘的方向垂直于该点的梯度。二维图像的梯度[11]如下所示:
还有,
在基于梯度的方法中,采用高梯度像素作为边缘。在梯度向量的角度给出的边缘像素处考虑的某个方向上的强度导数。设图 3,其表示 3 * 3 区域中图像点的强度。
在这个过程中,我们将学习基于梯度的算子,如 Sobel,prewitt 和 Laplacian 的高斯算子
(1) Robert 操作符: 这个操作符由 2 * 2 个简单邻接掩码组成。
这两个掩模可以分别应用于图像。该分析可以得到Gx和Gy方向的结果。分别确定垂直方向和平行方向[11]:
偶数大小的掩模很难实现,因为它们没有一个均匀的中心 [11]。上述方程可以写成如下:
梯度的大小给定为:
近似值给出如下:
在这里使用图 4 所示的掩模计算 Gx 和 Gy。导致特殊梯度的方向角的边缘如下所示:
Sobel 算子: 在边缘检测方法中 Sobel 算子得到了广泛的应用[12]。
这个算子可以通过用内核或左掩码过滤图像来实现。为了执行像素值的平方,图像再次使用其他掩码进行过滤。现在,两个结果相加,计算出它们的根。Sobel 的 3 * 3 卷积掩码如图 5 所示。
用图 5 的左掩模或核函数实现了 3 * 3 图像区域的第 3 行和第 1 行之间的差值,可以计算 x 方向上的偏导数的近似值。Y 方向的另一个掩模是通过取第 3 列和第 1 列之间的差来近似导数来实现的[11]。
在这里,偏导数给出如下:
当保持常数 c = 2 时,进一步说,这个方程可以是
还有,
梯度大小给定为:
边缘有一个方向的角度,提高了空间梯度,给出如下:
Prewitt 算子: 由于 Sobel 算子使用相同的方程,它使用常数 c = 1。所以 Prewitt 算子的掩码如图 6 所示。它类似于 Sobel算子[13]。在 Sobel 算子中,更接近掩码中心的像素不会对其进行任何强调[14]。传统的边缘检测方法主要是因为它们很简单, 边缘和方向的检测很容易实现。这些算子[15,16]对噪声敏感,并且不精确[17-23]。
Canny算子: 该算法的另一个名称是最优边缘检测器[15]。使用该算法,通过应用适当性而不带感情色彩的边缘特征来找到图像的边缘,因此 Canny 是一种非常重要的边缘检测技术[24]。
Canny 边缘算子的算法如下:
1.我们通过将图像k(s,t)与高斯函数卷积,可以得到平滑的图像k^(s,t)。
2.为了计算边缘强度,首先利用差分梯度算子,然后获得边缘大小和方向。
3.应用梯度大小与非最大值和抑制。
4.然后对输出抑制图像应用非最大值的阈值[24]。
基于拉普拉斯的边缘检测方法
基于拉普拉斯的边缘检测器通过计算图像的二阶导数表达式 来发现图像的边缘。二阶表达式在找到图像边缘的地方具有零交叉[10]。
然而,高斯的拉普拉斯是非常有用的,因为二阶导数对噪声是非常敏感的,这有助于滤除图像中的噪声[14]。
高斯(Log)的拉普拉斯函数
高斯边缘检测器的拉普拉斯系数也称为 LoG。它也称为 Marr-Hildreth 边缘检测器[25]。
这种方法定义图像是用高斯滤波器来降低卷积后的噪声,再
用平滑的方法来滤除孤立的噪声点和相关的小结构(图 7)。那些具有局部最大梯度的像素被检查为边缘,在其中找到零分叉点[14,26,27]。二阶导数表达式的零点交叉避免了那些与一阶导数相关的不重要边缘,这些像素选择的图像边缘的值高于某个阈值。边缘方向可以获得零交叉发生的地方[28]。获得零交叉发生的地方[28]。二维LOG因数[29,30]是以零交叉和sigma;标准高斯偏差为基础的,其形式如下:
在这里,我们用三维图表[31]显示 LoG 函数。它的视图看起来像墨西哥帽子,如图 8 所示。
Laplacian 边缘检测器只使用一个掩码来计算二阶导数掩码,这与 Sobel算子不同。用于它的掩码如图 9 所示。
在运行时上面三个图像只使用了一个掩码,因为L0G运算器中的掩码可以事先计算出来[25]。我们可以通过检测那些具有固定属性的像素周围的区域来找到所有方向上的边缘的正确位置[17-23]。边缘的方向和它们的检测在LoG运算器中是可能的。灰度级像素强度的变化是正确的边缘位置的指示,但有时在角落和曲线处会有损坏。它对一些现有的边缘没有反应,因为它也是一种噪音的感觉[31-33]。
基于模糊逻辑的边缘检测
采用基于模糊逻辑的方法对决策过程进行充分补充。因为模糊逻辑的概念是由 Zadesh 在 1965 年提出的。在图像处理领域,许多分析已经进行,其中包括图像边缘检测,分割和质量评估。在过去,研究人员提出了许多使用模糊逻辑的边缘检测技术[34]。
Davesh Nawgaje [34]提出了一种模糊推理系统(FIS)方法来检测彩色显微图像的边缘,
这是很稳健的,而且有稳定度。他们提出了基于逻辑的技术,这是一个由三个像素组成的集合,还使用了2*2窗口图像的最小掩码,由一组模糊规则组成,突出了所有与图像相关的边缘(图10)。
基于模糊逻辑的图像处理: 基于模糊逻辑的图像处理在特征 提取、分割、增强和边缘检测等图像处理领域具有广泛的应用前景。这分为以下三个阶段:
1.图像的模糊化
2.会员价值的改变
3.形象的去模糊化
对于图像的模糊化和去模糊化不需要硬件,因为图像数据的编码和解码在图像处理过程中是可以实现的。
在图像处理中,模糊逻辑在各个领域有着广泛的应用。它支 持以编码的形式基于人类知识的 if-then 规则,并且克服专家知识使用的困难是可能的。它由模糊集理论组成,这是一个强大的工具。
有不同的方法用于边缘检测,其中一些是:
Yasar Beceriklil 和 Tayfun Karan [3]提出,我们可以将启发式规则应用到系统中,并对不同的图像进行检验。此外,系统由规则变化所采用的动态结构组成。Dharampal 等[35]提出了一种改进的 1 型模糊逻辑边缘检测方法。将 Sobel 算子与 1 型模糊推理系统(T1FIS)相结合,得出了 T1FIS 优于标准边缘检测方法的结论。
在经典的边缘检测技术中,特定的使用阈值和 sigma; 等参数并具有固定的边缘厚度。但是模糊规则库具有增加新规则或改变参数可以改变边缘厚度的优点,因此它是一种灵活的结构,可以随时实现边缘检测过程。基于模糊的边缘检测方法具有结构灵活、复杂度低的特点。将来可以利用模糊规则库进行边缘检测。
一种描述性的 Sobel 图像边缘检测算法
图像边缘检测是一个定位图像边缘的过程,它对于确定输入灰度图像每一点 i 的近似绝对梯度幅度非常重要。为边缘获得合适的绝对梯度幅度的问题在于所使用的方法。Sobel 操作符对图像进行二维空间梯度测量。将二维像素阵列转移到统计上不相关的数据集中可以提高冗余数据的去除率,因此需要减少数据量来表示数字图像。Sobel 边缘检测器使用了一对 3 times; 3 的卷积掩模,其中一个在 x 方向估计梯度,另一个在 y 方向估计梯度。Sobel算子对图片中的噪声非常敏感,它能有效地将图片突出为边缘。因此,Sobel 操作符被推荐用于数据传输中的大规模数据通信。
关键词: 图像处理,边缘检测,Sobel 算子,数据通信和绝对梯度幅度。
引言
图像处理在现代数据存诸和数据传输中非常重要,特别是在图像的渐进式传输、视频编码(远程会议)、数字图书馆和图像数据库、遥威中。它与通过算法对图像进行操作以产生所需的图像有失(Milan等人,2003)。数字信号处理(DSP)以多种方式改善在极其不利的条件下拍摄的图像的质量:亮度和对比度调整、边缘检测、降噪、焦点调整、运动模糊减少等(Gonzalez,2002)。其优点是,图像处理允许更广泛的算法应用于输入数据,以避免在处理过程中出现噪音和信号失具等问题(Bakeramp;Nayar,.1996)。数字图像处理的许多技术是在20世纪60年代在喷气推进实验室、麻省理工学院开发的技术(MIT)、贝尔实验室和少数其他地方。但是,在那个时代的计算设备中,采购成本相当高。
随着2000年快速的计算机和信号处理器的出现,数字图像处理成为最常见的图像处理形式,并被普遍使用rsquo;因为它不仅是最通用的方法,而且也是最便宜的。这个过程允许使用更复杂的算法进行图像处理,因此可以在简单的任务中提供更复杂的性能,并且可以实现通过模拟手段不可能实现的方法(Micheal,2003)。因此,图像 存储在计算机上作为表示像素或点的比特集合形成图像元素(Vincent,2006)。首先,图像 是空间上参数的度量,而大多数信号是时间上参数的度量。其次,它们包含大量的信息 (Guthe amp; Strasser,2004) ; 图像处理是任何形式的信息处理,其输入是图像,如视频帧; 输出不一定是图像,但可以是图像的一组特征(Yuval,1996)。
大多数图像必理技术涉及将图像
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[587809],资料为PDF文档或Word文档,PDF文档可免费转换为Word

