
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
IEEE SIGNAL PROCESSING MAGAZINE PP128-132.
由一个简单且直观的推导来理解Kalman滤波的基本原理
Ramsey Faragher
本文提供了一个简单而又直观的Kalman滤波的推导,目的是将该实用性工具教给没有较强数学背景的学生。其中最复杂的部分是理解将两个高斯方程结合在一起的推导过程,并将结果简化成最佳形式。
卡尔曼滤波拥有超过50年的历史,至今仍作为最重要且常用的数据融合算法之一。它是以Rudolf. E. Kalman的名字命名的,卡尔曼滤波的成功源于其较小的计算需求和简洁的递归特性,并且它是对有着高斯误差的一维线性系统的最优估计。卡尔曼滤波的典型用法是使噪声数据变得更平滑,并提供最优的参数估计。其实际应用包括全球定位系统、接收器、无线电设备的锁相回路、笔记本电脑触控板的输出等等。
从理论观点上来讲,卡尔曼滤波是一个在线性系统中有最优估计的一种算法。它是一个贝叶斯模型,与隐马尔科夫模型相似,其潜在变量的状态空间是连续的。所有潜在和可观测的变量都服从高斯分布(通常是多元高斯分布)。本文的目的即是通过一个简单且直观的推导让那些对该描述感到困惑或害怕的人能够理解卡尔曼滤波的基本原理。
相关背景
卡尔曼滤波(及其变形,比如扩展卡尔曼滤波和无迹卡尔曼滤波),它们在信息处理领域中是最受欢迎的数据融合算法之一。早期最著名的应用是在阿波罗导航计算机中,它将阿姆斯特朗送至月球并将其带回来。如今卡尔曼滤波应用于每一个卫星导航装置、智能电话和许多电脑游戏中。
卡尔曼滤波作为最小二乘估计用于向量代数的推导,是一个适合于喜欢数学却没有强大数学知识背景的学生的方法。此文章使用一个物理例子来对卡尔曼滤波进行推导,并且这个物理例子的重要特性是服从高斯分布——特别地,两个高斯分布的乘积仍是一个高斯分布。
预备知识
本文的目的不是面向那些对卡尔曼滤波毫不了解的学生进行教授,而是旨在对那些没有强大数学背景的学生提供一个简单的理论推导。读者需要了解卡尔曼滤波的一些向量记法和专业术语,比如状态向量和协方差矩阵。本文旨在教给那些对卡尔曼滤波有初步认识、但却又不是完全了解的学生。本文将分好几个章节来讲述,而不是用一两段话来解释完全。
问题陈述
系统模型
在卡尔曼滤波模型中,假设时刻的真实状态是从时刻的状态上演化而来的,并符合下式:
(1)
其中,是时刻的系统状态;是时刻对系统的控制量;是作用在时刻上的状态
变换模型;是作用在控制向量上的输入控制模型;是过程噪声,并假定其符合均值为零、协方差矩阵为的多元正态分布,即:
测量模型
在时刻,对系统状态的测量值满足下式:
(2)
其中是时刻的测量值;是观测模型,它把真实状态的空间映射到观测空间;是观测噪声,其均值为零,协方差矩阵为,且服从正态分布。
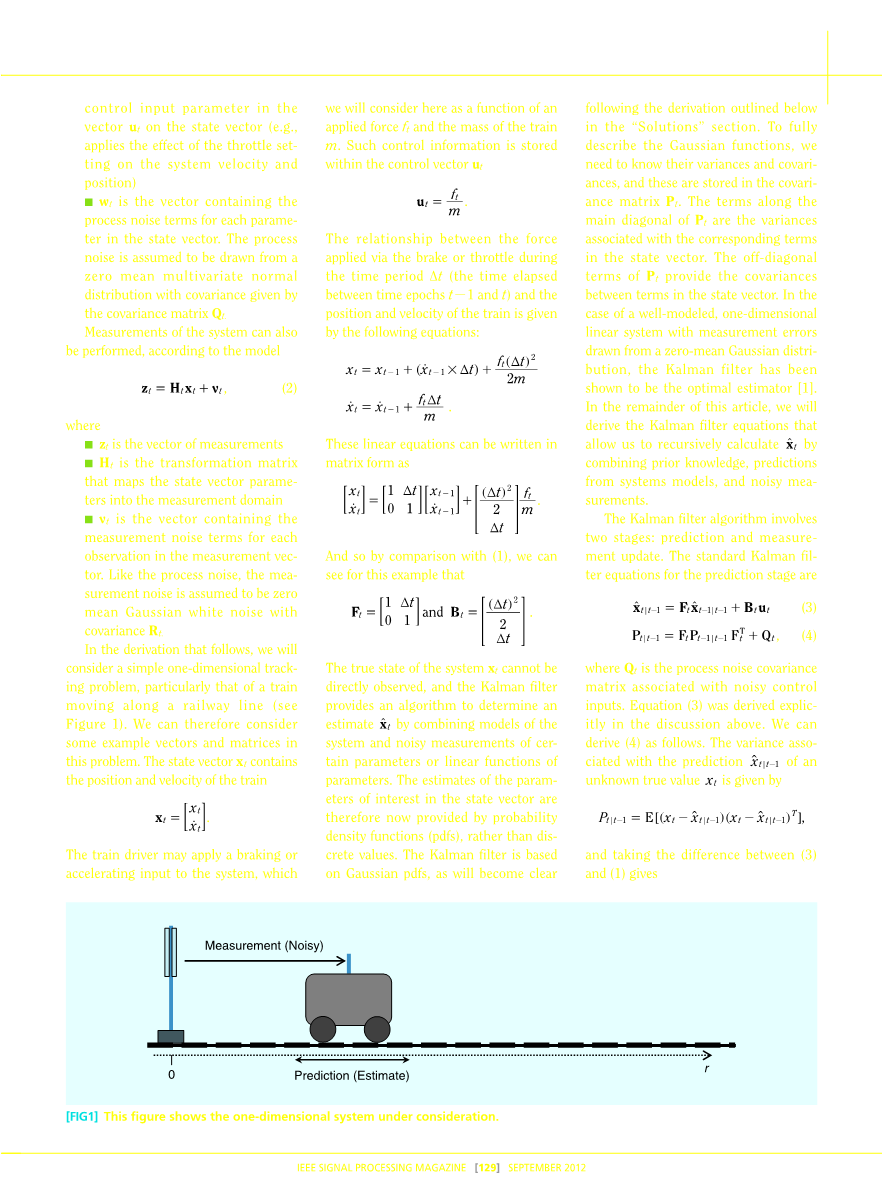
在以下的推导过程中,我们将要考虑一个简单一维轨迹问题,尤其是一个火车沿轨道向前移动,见图1。因此我们可以考虑一些在该例子中的向量和矩阵。其中状态向量包含火车的位置和速度:
图 1 火车所在的一维线性系统
货车司机可能用刹车或油门来推进该系统,此处我们要考虑到一个作用力函数和火车的质量。这些控制信息存储在控制向量中:
在时间周期内刹车或加速的作用力和火车的位置以及速度之间的关系用如下方程给出:
这些线性方程可以写成矩阵形式:
系统的真实状态无法被直接观测,Kalman滤波通过结合系统模型和具体参数的噪声或参数的线性方程,提供了一个算法来确定一个估计。在状态向量中的参数估计,由概率密度函数提供,而不是一个个离散的值。Kalman滤波是基于高斯分布的概率密度函数。为了完整的描述高斯函数,我们需要了解它们的方差和协方差,这些储存在协方差矩阵中。的主对角线是与状态向量有关的方差,非对角元素提供了状态向量的协方差。在一个有着服从零均值高斯分布的测量误差的线性系统中,Kalman滤波可视为最优估计。在这篇文章的余下部分,我们将具体推导Kalman滤波方程,这样可以通过结合先验信息、对系统模型的预报以及噪声的测量来递归地计算。
卡尔曼滤波算法包含两个阶段:预报和测量校正。预报阶段的标准卡尔曼滤波是:
(3)
(4)
其中是递归过程中与噪声控制输入有关的噪声协方差矩阵,方程(3)在以上的格式中用显式的格式推导。以下我们可以对公式(4)进行推导,一个与未知真实解有关的预报值的方差用下面公式表示:
(1)式和(3)式之间的差别导致以下结果:
注意到状态估计误差和过程中的噪声是不相关的:
测量更新方程由以下给出:
(5)
(6)
其中
(7)
这篇文章剩下的部分我们将推导公式(5)-(7)。
图 2 时系统的初始状态
解决方案
此处通过一个简单的一维轨迹问题,特别是一个火车沿着铁轨移动的问题来推导Kalman滤波。对每一个测量单元,我们都想知道火车位置的最优估计,或火车顶部无线电天线的位置。可用的信息有两个来源:一个是基于上一时刻已知的火车的位置和速度来做的预报值;另一个是根据轨迹无线电系统得到的测量值。预报值和测量值的信息结合起来,就得到了火车位置的最优估计。图(1)生动地展示了该系统。
假设系统的初始状态(时刻)是完全已知的,就像图(2)中展示的那样。火车的位置由高斯概率密度函数给出。在下一时刻(),我们可以基于已知的初始时刻的速度与位置、它们的加速度等,预测火车的新位置。在实践中,我们可能存在一些在减速或加速方面的输入控制量信息。在任何情况下,都可以得到火车新位置的预报值,并由一个有新均值和方差的高斯概率密度函数在图(3)中体现出来。在数学上,这个步骤由公式(1)表示,变量由公式(2)给出。在时刻的各种情况的噪声,降低了我们对火车位置预测的准确度。这个噪声是由时刻加速或减速的不确定性造成的。
图 3 时刻火车位置的预报和不确定性
图 4 时刻火车位置的测量值和噪声测量中的不确定性
图 5 时刻与测量值和预报值有关的概率密度函数相乘得到的新概率密度函数(绿:最优估计值)
时刻,我们通过无线电定位系统对火车位置产生一个测量值。在图(4)中,用蓝色部分表示出来。火车位置的最优估计值是结合预报值和观测值得到的。它是将两个相关的密度函数相乘得出的,其最优估计值在图(5)中用绿色部分表示。
高斯函数的一个主要特性,即两个高斯分布的乘积是另一个高斯分布。但是生成的函数并不增加它的复杂度和项数。在每一时刻后,新的概率密度函数可以由高斯分布表示出来。
这是Kalman滤波简便递归过程中的一个关键。以上图中的各个阶段可以形成递归循环来推导卡尔曼测量更新方程。
预报值的概率密度函数在图(3)中用红色的高斯函数表示,由一下方程给出:
(8)
观测值的概率密度函数在图(4)中用蓝色的高斯函数表示,由以下方程给出:
(9)
这两个概率密度函数给出的信息用乘法进行结合,比如同时考虑到预报值和观测值,见图(5)。而新的概率密度函数表示预报值和测量值的融合。系统最优线性估计值由以下两个高斯方程给出:
(10)
在这个新方程中的二次项可以被展开,整个式子可以重新被改写成高斯项:
(11)
其中
(12)
(13)
最后的这两个方程表示更新的卡尔曼滤波算法中测量值更新的步骤,在下面方程将有明确地表达。然而要提出一个更通用的例子,我们就需要对该例子进行扩展。
在以上的例子中,我们假设预报值和观测值都是在相同的坐标系中给出的。这就导致了在方程中我们需要用一个独特的部分来表示预报值和观测值更新的状态。但值得注意的是,在实际生活中,一个方程需要在相同的域中刻画预报值和观测值。然后我们对这个例子进行一个更实际的扩展,火车的位置将被直接预报为一个沿着铁轨线的新距离,计量单位是米,然而时间上的测量值单位是秒。要将预报值和观测值的概率密度函数相乘的话,就要把其中一个值的概率密度函数通过转移矩阵转移到另一个值所在的域中。
我们现在再看公式(8)和(9),原先和的单位是米,现在我们想把两者的单位转换成与发射无线电预报值一致的单位秒。空间上的预报概率密度函数要通过光速来转化到测量域中,变成如下两个式子:
(14)
(15)
其中所有的分布现在都由测量值的域来定义,无线电信号沿着时间轴进行传输,时间的测量单位是秒。
由之前的推导,现在可以得到以下方程:
(16)
将和代入得:
(17)
同理,融合后的方差估计变为:
(18)
我们现在可以将由标量导数得到的准确项和我们用Kalman滤波算法得出的标准向量和矩阵进行比较:
由数据融合得到的状态向量
在数据融合前得到的向量,比如预报值
数据融合后的协方差矩阵
数据融合前的协方差矩阵
观测向量
与观测中的噪声有关的不确定矩阵
将状态向量参数映射到测量域中的转移矩阵
卡尔曼增益
现在,我们能很容易地看出标准卡尔曼滤波方程及上文推导的两个公式(17)和(18):
结论
卡尔曼滤波可以通过一个简单直观的推导过程来教授,该推导过程包括标量数字、基础代数操作、和一个简单的实验。该方法允许学生即使没有强大的数学理论知识,也可以理解基于直观状态下的卡尔曼滤波的核心,并理解滤波中由两个高斯函数的乘积进行融合形成的递归过程。
作者简介
Ramsey Faragher(ramsey@cantab.net),是一位在英国BAE系统先进技术中心的首席科学家。
参考文献
[1] B. D. O. Anderson and J. B. Moore, Optimal Filtering. New York: Dover, 2005.
[2] R. E. Kalman, “A new approach to linear filtering and prediction problems,” J. Basic Eng., vol. 82, no. 1, pp. 35–45, Mar. 1960.
[3] P. D. Groves, Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Norwood, MA: Artech House, 2008.
[4] S. J. Julier and J. K. Uhlmann, “Unscented filter-ing and nonlinear estimation,” Proc. IEEE, vol. 92, no. 3, pp. 401–422, 2004.
[5] J. Bibby and H. Toutenburg, Prediction and Improved Estimation in Linear Models. New York: Wiley, 1977.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31451],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

