
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
第十八届世界大会议事录
国际自动控制联合会
米兰(意大利)2011年8月28日 - 9月2日
细胞能量代谢:受限卡尔曼滤波器
Guillaume Goffaux,Michel Perrier,Mathieu Cloutier
蒙特利尔工业大学杰出贡献奖(Deacute;partementdeGeacute;nieChimique)
Montreal,QC,加拿大。
加利福尼亚理工大学
蒙特利尔,QC, 加拿大。
摘要
在这项研究中,约束卡尔曼滤波器是在动态环境下设计的模式再现细胞能量代谢。 该模型描述了ATP的生产,这可以根据能源需求而变化。 在这个模型中,变量的数量和参数以及与参数值知识相关的不确定性受到惩罚状态估计。 此外,由于非线性和非负性约束在状态变量上,考虑到不确定性,开发了一个受约束的卡尔曼滤波器并进行参数化来与扩展卡尔曼滤波器进行比较。
关键词:状态估计;卡尔曼滤波器;约束;参数不确定度;细胞能量代谢
1.绪论
需要能量的工艺在电池中具有核心代谢作用。 例如,需要化学能氨基酸,核苷酸和蛋白质的合成主要与核苷酸的产生有关,ATP(三磷酸腺苷)。
更一般地,能量参与细胞过程,如增长,维护和分割(Lehninger et al。,2004)。此外,许多疾病如心血管功能不全(Hardie,2008),癌症(Mayevsky,2009)或神经变性,例如 帕金森病(Winklhofer and Haass,2010)或阿尔茨海默病(Parihar and Brewer,2007)也与之相关能源调节过程的缺陷。 那是为什么,模型被开发以更好地了解细胞能量行为,特别是ATP与ATP之间的关系其他细胞成分(Cloutier and Wellstead,2010;Guml;obel等,2010)。
一般来说,相关模型是非线性的,复杂的有很多变量和参数。 还有一些变量,如浓度,仅限于和限制可以测量这些的一小部分。 这个限制在体内测量方面尤其如此。
在这种情况下,状态估计是一个合适的解决方案。设计算法重建a的状态变量系统从可用的测量和动态,即使它存在不确定性(Goffaux,2010)。一些例子是例如粒子滤波和移动平面估计(Rawlings和Bakshi,2006),无声和合奏卡尔曼滤波(Mesbah et al。,2010),高增益观察者(Boizot等,2010),间期估计(Goffaux et al。,2009)或基于被动的状态观察员(Moreno,2008)。 在先进的状态估计中,配合方法,选择合适的算法具有以下特征:计算的间隔与国家的管理约束,模型非线性和参数不确定性。
在这项研究中,一个卡尔曼滤波器(Prakash et al。2010; Evensen,2007)设计采取参数不确定性和非负性约束。 的算法是基于蒙特卡洛取样的估计状态和参数分布并考虑某些采样在受限状态下是不可行的空间。 该算法不估计参数,但是计算基于状态变量的置信区间根据以前的识别给出的不确定模型处理。
因此,本文的组织结构如下。 首先描述细胞能量代谢模型,进行可观察性分析。 然后,讨论受约束综合卡尔曼滤波器和参数不确定性。 最后,说明算法并与扩展卡尔曼滤波器进行比较。 未来的工作将结束讨论。
- 细胞能量代谢:模型
细胞能量代谢的通用模型来自Cloutier和Wellstead(2010),主要描述细胞如何消耗葡萄糖以产生ATP。此外,乳酸盐被认为是替代来源的ATP。 因此,两个主要的代谢途径是
考虑到:
糖酵解:它将每摩尔葡萄糖转化成2摩尔丙酮酸盐。 糖酵解由几种组成中间反应,但它们全球消耗2摩尔的ATP并产生4摩尔的ATP。 模型(图2)考虑2个中间成分:F6P和GAP。此外,F6P与另一组件F26P有关,通过可逆反应。 它可以被看作是一个缓冲区在高能量需求期间累积增加糖酵解通量。
氧化磷酸化:它发生在线粒体并由Krebs循环描述。 每摩尔丙酮酸被氧化并产生15摩尔的ATP。 在这个模型中,一个反应总结了一个动力学过程率nu;OP。
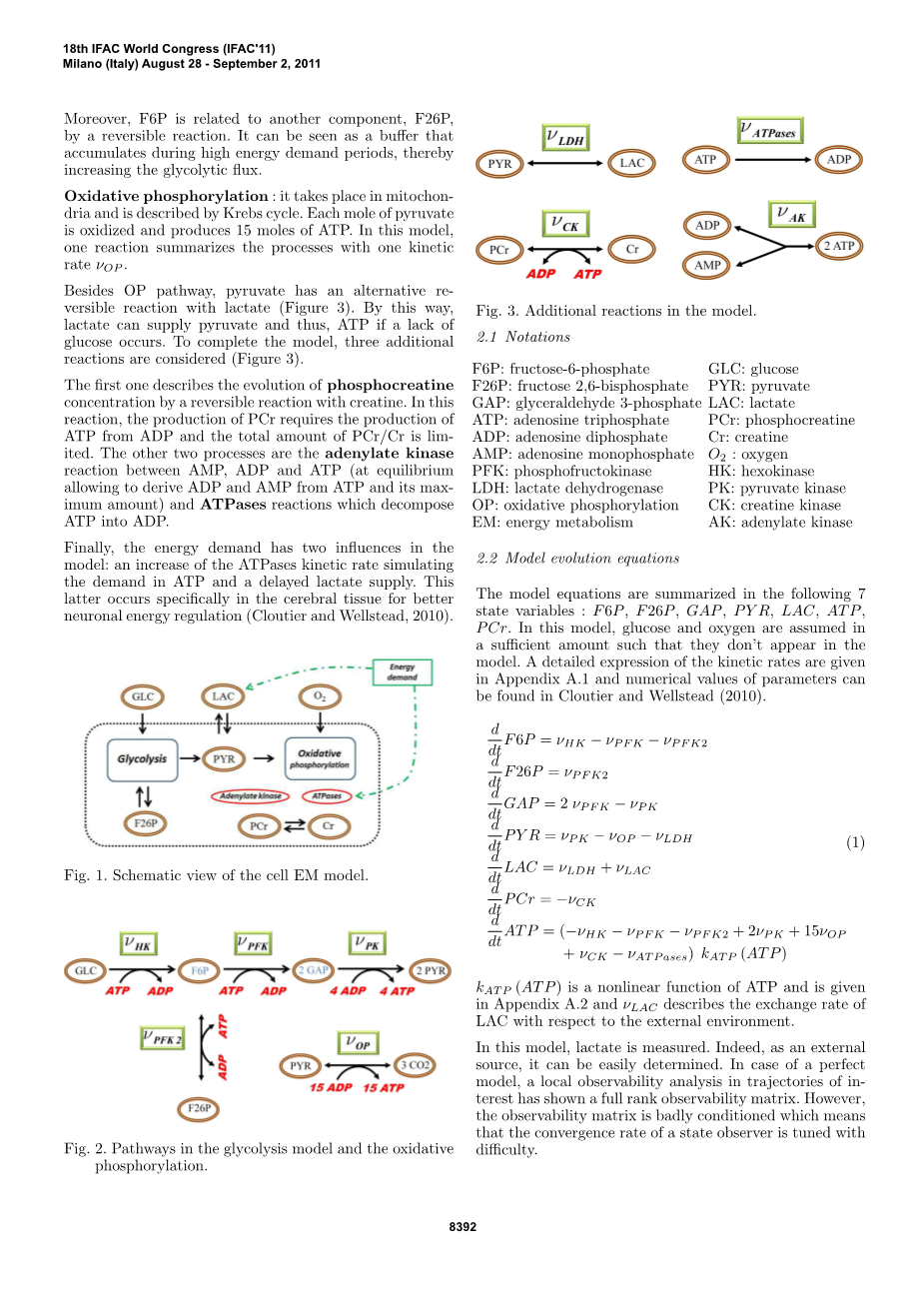
除OP途径外,丙酮酸还具有可逆性与乳酸反应(图3)。 这样,乳酸盐可以供应丙酮酸,因此,ATP如果缺乏葡萄糖发生。 完成模型,另外三个考虑反应(图3)。
第一个描述了磷酸肌酸的演变通过与肌酸的可逆反应浓缩。 在这个反应,PCr的生产要求生产来自ADP的ATP和PCr / Cr的总量是有限的。另外两个过程是腺苷酸激酶AMP,ADP和ATP之间的反应(平衡时)允许从ATP衍生ADP和AMP及其最大值量)和分解的ATP酶反应ATP进入ADP。
最后,能源需求有两个影响模型:ATPase动力学模拟的增加ATP的需求和延迟的乳酸盐供应。 这个后期发生在脑组织中更好神经元能量调节(Cloutier andWellstead,2010)。
图1.细胞EM模型的示意图
图2.糖酵解模型中的途径和氧化性磷酸化
图3.模型中的额外反应
2.1 符号
F6P:果糖-6-磷酸 GLC:葡萄糖
F26P:果糖2,6-二磷酸酯 PYR:丙酮酸
GAP:甘油醛-3-磷酸 LAC:乳酸盐
ATP:三磷酸腺苷 PCr:磷酸肌酸
ADP:二磷酸腺苷 Cr:肌酸
AMP:腺苷一磷酸 O2:氧
PFK:磷酸果糖激酶 HK:己糖激酶
LDH:乳酸脱氢酶 PK:丙酮酸激酶
OP:氧化磷酸化 CK:肌酸激酶
EM:能量代谢 AK:腺苷酸激酶
2.2 模型衍化方程
模型方程总结如下7状态变量:F6P,F26P,GAP,PY R,LAC,ATP,PCr。 在这个模型中,假设葡萄糖和氧气足够的数量,使它们不出现在模型。 给出动力学速率的详细表达在附录A.1和参数的数值可以可以在Cloutier和Wellstead(2010)找到。
(1)
kATP(ATP)是ATP的非线性函数,并给出在附录A.2中,nu;LAC描述了汇率LAC相对于外部环境。
在这个模型中,测量乳酸盐。 的确,作为一个外部的来源,可以很容易地确定。 在完美的情况下模型,感兴趣的轨迹中的当地可观察性分析已经显示了一个完整的秩可观测矩阵。 然而,观察性矩阵的条件差,这意味着调整状态观察者的收敛速度相当困难。
3.受约束的卡尔曼滤波器
以下述方程考虑系统:
(2)
x Rnx是状态向量,u Rnu是输入向量,y Rny,输出向量和theta;2 Rn的参数向量。 此外,eta;和ǫ是状态向量和测量噪声。 他们的分布是被认为是已知的。
在续集中,首先解释了卡尔曼综合滤波器,其次是引入约束,然后是参数不确定性。
3.1 组合卡尔曼滤波器
通用算法分为3个主要步骤:a初始化,预测和校正步骤。
在初始化步骤中,给出初始估计通过矢量均值坸0和协方差矩阵P0。 假设是真正的初始状态x0来自a高斯分布:x~ N(X0,P0)。 此外,N个样本从该分布生成为初始化下一个预测步骤:
预测步骤由计算定义来自模型演化方程的未来状态变量初步估计。 平均向量和协方差在给定时间t的矩阵通过考虑估计N个样本的传播。
(3)
其中eta;j(tk)根据已知的状态噪声被绘制分配。 从N个预测样本,估计计算平均向量和协方差矩阵:
(4)
备注1.尽管一般的非线性函数f情况下,估计的平均向量和协方差矩阵是假定遵循高斯分布和置信度可以计算间隔。
在校正步骤中,比较测量值yk 1给出了N个预测的测量输出yj(tk 1)旁观。
(5)
其中y(tk 1)是预测的测量状态和delta;jy(tk 1)样本与之间的相应偏差平均值。 ǫj(tk 1)是从已知的测量得出的噪声分布。
卡尔曼校正方程可以通过计算应用测量误差协方差矩阵Pyy(tk 1)和测量之间的交叉协方差矩阵Pxy(tk 1)和状态错误。
(6)
更新之后:
(7)
最后,更新的均值向量坸(t k 1)和协方差矩阵P(t k 1)是:
(8)
此外,由于高斯假设被考虑,新的样本可以从和另一个预测步骤可以开始。备注2.从多变量生成N个样本的方法高斯分布N(.x,P)是考虑N独立样本从标准正态分布这样:其中U和V由P:P = UV UT的特征分解给出。
3.2 扩展到状态约束
前一种方法的缺点是存在状态约束可能意味着不可行的状态轨迹在预测步骤中。 这就是修改的原因通过考虑较低的x和x 上升引入向量相对于状态向量x。 样本是根据以下条件概率绘制密度函数。
(9)
在预测步骤中,首先绘制N0个样本P(x),然后选择N0个样本满足约束[x-,x ]。
图4. 模拟细胞EM模型
3.3扩展到参数不确定性
在参数不确定的情况下,估计的大小置信区间增加。 为了进来考虑到参数向量由高斯给出分布:并且在预测步骤中,生成包含状态和参数的N个样本向量。
4.模拟和状态估计
能量代谢模型(1)首先被模拟(图4)通过考虑诱导a的刺激可用ATP分子的减少。 有一段时间延迟,乳酸盐增加额外的回报来源通过丙酮酸生成ATP。 可以看出乳酸梭子的表达,例如在这种情况下的神经细胞。 关于其他变量,F6P,F26P,GAP和PCr,它们的价值是从新的ATP推导出来的水平。
使用乳酸盐测量(采样时间:0.5s和标准偏差:0.05mM),扩展卡尔曼(Extended Kalman)过滤器设计考虑了一个完美的模型。 在图5中,计算出这种状态估计的一个例子99.99%置信区间。 状态协方差矩阵被选为。
图5. 细胞EM模型的状态估计。 蓝色:真实轨迹,红色:模型预测与假初始条件绿色:EKF,黑色黑色:EKF 99.99%置信区间。
此外,在图5中,EKF估计轨迹也与模型轨迹进行比较具有相同的初始条件。 这个比较显示状态估计器的改进和效果严重的可观察性矩阵。 作为证据,瞬态部分的改进显示更快收敛速度,但差距不大。 最后,置信区间是保守的正确包围真实状态。
在第二步中,使用a进行测试综合卡尔曼滤波器考虑到约束。
4.1 约束Enkf
细胞EM模型的状态演化受到限制数学和生物考虑。 浓度是非负变量,ATP和PCr上限是细胞可以的最大数量包含:
(10)
其中ANP可以被认为是细胞总能量和PCrtot作为磷酸肌酸的最大量。这些保守法通常比较有效在这项工作中探索的时间尺度很短。
在3.2节中解释的约束的EnKF被应用到以前的配置在图6中。主调谐参数是采样次数N0约束考虑:N0 = 1000.可以观察一个较小尺寸的置信区间具有更长的计算时间(ge;100times;更长)。
在表1中可以看到另一个比较40个配置的均方误差不同初始条件和测量。 在表1中,macr;ǫi是相对于EKFǫEKF的相对均方误差我为状态变量i:
图6.EM模型的状态估计。 蓝色:真正的轨迹,绿色:EnKF,虚线黑色:EnKF 99.99%置信区间。
表1. 相对均方误差计算通过考虑40种不同的情景:EKF和EnKF(N0 = 1000)
4.2约束EnKF参数具有不稳定性
为了考虑参数不确定度,最大为12假定运动速率不确定(相对误差为5%)使得所考虑的参数遵循高斯分配样品,然后由以下公式给出:
相关参数都有。
相关结果如图7所示可以观察估计轨迹的分歧由于错误的稳态值。 而且,间隔尺寸随着相对误差的增加而无参数进行估计。 但是,置信区间仍然满足和支持的适用性提出的方法。
图7. 用参数估计细胞EM模型不确定性 蓝色:真正的轨迹,绿色:EnKF,虚线黑色:EnKF 99.99%置信区间。
5.总结
在这项工作中,状态估计方法是按顺序开发的,在模型描述中重建关键单元格组件,研究所致的细胞能量代谢,更好地了解能源缺乏的疾病。
主要困难来自于少数可用的测量变量及其尺寸一个系统。 此外,间隔被估计为一种措施从给定模型的可用准确性,不确定参数和测量。
在这种情况下,卡尔曼算法被选为第一选择由于他们的共同使用和方便基于高斯的置信区间的计算假设 这项工作已经显示了一个扩展卡尔曼滤波器可以应用,特别是如果可观察性满意 但是,置信区间的大小可以由于非
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26966],资料为PDF文档或Word文档,PDF文档可免费转换为Word

