英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
混合电力驱动船基于多能量存储系统的电源系统
摘要:本研究提出了使用被动混合拓扑的船舶的多种能量存储元件的可用性。所考虑的混合基于通过双向DC / DC转换器将NiMH电池和超级电容器连接到DC电力分配的被动并联拓扑。整体推进结构是混合动力系统,其中发动机 - 发电机组是主要能量源,并且多能量存储系统(ESS)应答车载负载所需的间歇功率。首先,使用电压,存储元件的特性和典型的功率需求曲线来确定多个ESS的大小。此后,通过级联的电流和电压线性控制器推导出该混合的控制方案。基于DC配电电压的稳定性和固有存储元件的特性的能量管理策略被完全解决,以减少车载重量和空间,燃料消耗,污染和优化全局效率。实验结果表明,发动机发电机实现了恒定的功率,同时多个ESS稳定了具有未知功率需求曲线的DC链路电压。验证了基于DC链路电压稳定性作为能量管理策略的具有减小的控制层复杂度的所提出的被动混合拓扑的有效性.
1简介
全球环境关注正在推动更合理和有效的能源使用,产生混合能源系统,其中通常在存在固定和运输应用的能量存储元件的情况下涉及多于一个的能量源。关于海洋部门,由于对电力基本上支持电力推进和电气辅助系统的需求增加,电动船舶的研究和开发努力已显著增加[1]。船舶推进的主要挑战是排放和燃料消耗的减少[2]。目前,电力船的概念已经是军事和民用船舶能源系统设计的经典方法[2-6]。在这种方法中,用于推进,照明,传感器,通信,武器(用于军用船)和全局船舶网络的配电系统是完全电动的。一些研究已经证明,这个概念允许更好的能量管理和灵活性,并且较常规柴油或燃气涡轮推进主要降低燃料消耗比[7-11]。电力推进的主要好处可以归纳为船舶结构优化;安装功率降低;船舶振动减少和机动灵活性增加[12,13]。
最后的优点源于电力推进在即使在非常低的速度下,也能产生相当大的扭矩,并且当使用吊舱时,由于电动机和/或螺旋桨可旋转高达360°,可以提高船舶安全性和灵活性。虽然,这些特性取决于存储在船上的能量的可用性,并带来选型和能量管理系统(ESS)的特定主题。 ESS的设计必须基于船舶的要求[13]。
在这方面,为了实现全面的潜在效率和环境效益,船舶必须被视为在建议的运行模式中运行的工程系统。 这涉及船舶的设计,操作和维护方面,必须作为统一系统进行研究。 更具体地说,综合设计必须在单独的系统内涵盖传统的海洋结构,海洋和电气工程以及控制技术。
在全球范围内,从减少挥发性有机物和微粒排放的观点,基于电池的船舶推进是有利的。然而,目前,必要的电池组的尺寸将妨碍它们作为唯一的推进装置,但是在短途海上航行或与其它能源(燃料电池,柴油发动机,光伏电池板等)结合的最小船舶。以这种方式,电池与其它推进模式相结合可以为推进中小型船舶提供潜在的混合解决方案。混合动力车辆通常与汽车道路系统相关,其中通过气体发动机和电力推进系统以及适当的ESS的组合,每个系统的最合适的特性可以被充分利用[14]。
因此,可以考虑船舶推进采用混合馈送系统(电源和存储元件),因为通过同步发电机以串联混合模式产生电能,或者直接使用发动机作为并联混合模式中的推进的主要机械能量源[ 5,14]。
目前,很少船舶使用基于混合动力概念的架构,即便采用了,他们当中的差异很小。更经典的使用燃料或气体发动机发电机组产生电能,其他人使用氢船载燃料电池系统,而不是常规发电机,都被归类为串联混合结构[10,15]。并行混合结构下,当需要峰值推进功率时,有的方案使用电动机做辅助增强推进运行模式 [5,15]。最后,在全电气结构中,其他方案使用光伏面板(通常放置在船顶)或氢燃料电池产生能量[16]。
混合动力概念已经被提出用于几种道路电动车辆[17,18],但是仍然正在研究其他应用,如船。在这个应用中的具体负载需求曲线打开了对能量问题的新方法的大门,以便把商业能量存储元件最大化,并实现低能量消耗和低排放。已经针对道路应用研究了几种拓扑[18]。被动拓扑是成本最低的,但是对于道路应用而言呈现出一些降低的性能。主动拓扑可以最好地利用每个能源,但尺寸更大,成本更高和结构更复杂。这些最后提出了在线算法定义中的一些巨大的挑战,以正确分配几个能源之间的功率和能量[19-21]。尽管这些复杂算法显示出优异的结果,但该行业仍然倾向于需要较少组件的解决方案和使用较小计算资源的管理系统。
本文的目的是提出一种基于被动混合拓扑耦合电池和超级电容器(SCs)的混合系列船舶应用的替代ESS。该建议还涉及每个元件的尺寸和DC链路电压控制实现,允许间接能量管理,用于混合系列船舶应用。正如Barrade和Rufer [22]所推荐的,基于SCs的能量能力的高效率可用性是针对电压大于一半的范围,其中SC可以提供其存储能量的75%。接近这种效率概念,所提出的多ESS设计允许在较高电压变化范围内使用50%的SCs存储的能量。该方法的新颖性在于基于更简单的控制层的管理架构的组织,其使用基于DC / DC转换时的功率平衡概念的级联的线性控制器,以稳定DC链路电压并同时将在能量存储元件间划分功率需求,没有复杂的实现算法。因此,对于具有特定负载曲线的所提出的案例研究,设计以及控制回路和相关的间接能量管理导致SCs在高于70%的充电状态(SoC)下的操作,保证了高效率使用多个ESS。
所提出的控制方案可以容易地在低成本微处理器中实现,利用由固有存储元件特性支持的自然功率流管理的优点。所提出的系统可以导致安装的柴油发动机功率的有效减小,同时保持操作在其最高效率点。
本文组织如下。在介绍工作环境及其贡献后,第2节介绍了一个具体旅行船案例研究的船载能源设计。第3节介绍了使用MATLAB / Simulinktrade;模型和DC链路功率分配的控制方法。在第4节中,给出了一些模拟结果来验证尺寸设计和控制层实现。第5节介绍了包括同步交流发电机和ESS被动拓扑的串联混合结构的小比例装置,并进行实验验证,证明可实现全船电力系统改善和减排。最后,在第6节中,提供了主要结论。
2船载能源设计
2.1船舶案例研究
游览船船上能源的设计应考虑相当多的因素,包括标准旅行,导航环境等。为此,在这项工作中,它被认为是一个值得感兴趣的例子,该案例由阿尔斯特船旅行公司给出,该船工作于阿尔斯特湖,位于德国汉堡,德国的一个重要的旅游景点。对该例子的兴趣来自许多因素。第一个是环境污染,因为作业地区是一个生态敏感的地区,位于汉堡的中心地带。第二个是减少的消耗,噪声和振动(当导航主要发生在生态敏感地区时,噪声是一个很大的问题)。此外,另一个考虑是与电力推进的固有优点:更大的机动性和推进系统的质量[13] 在船上更好的分布。
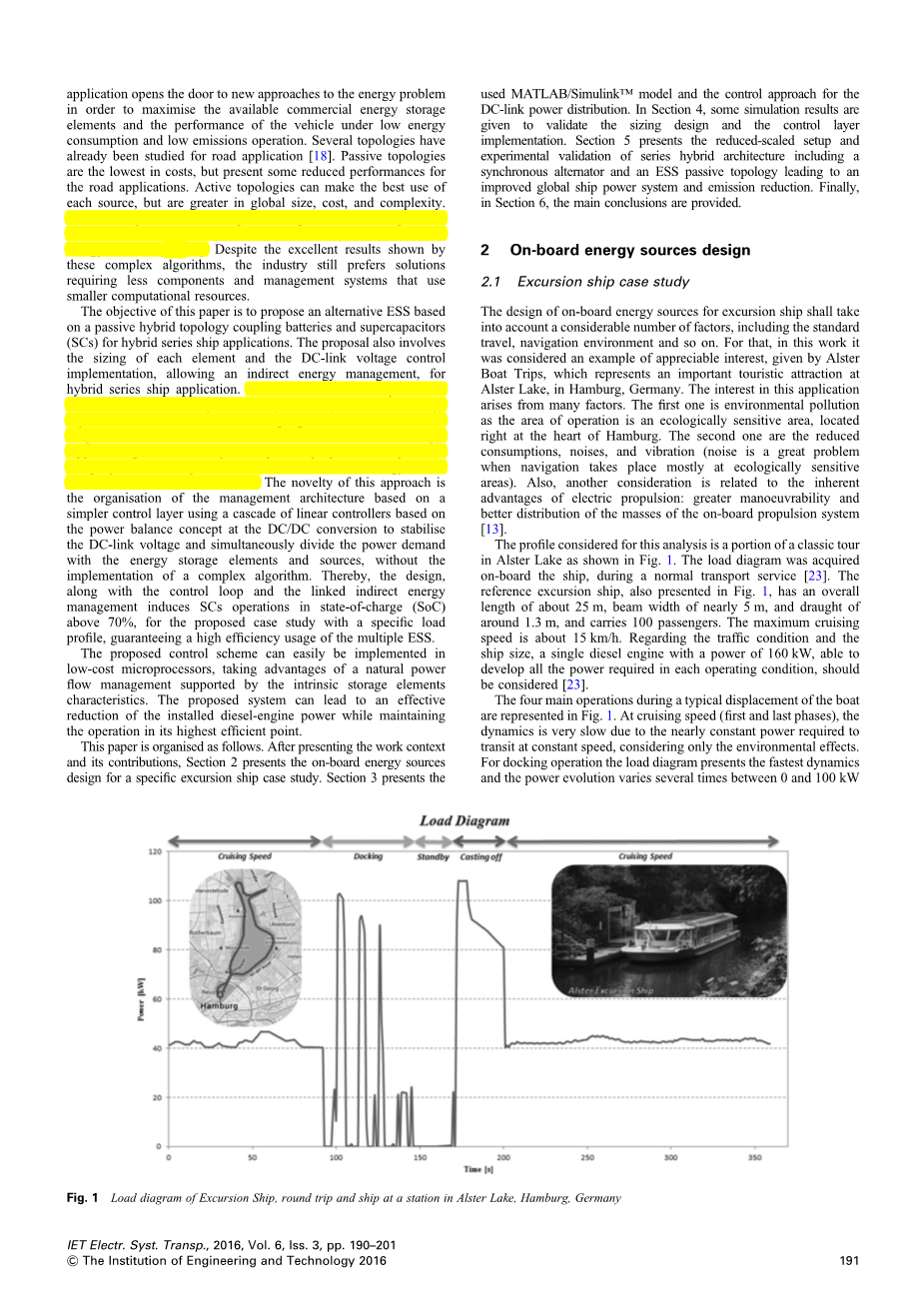
为此分析考虑的剖面是阿尔斯特湖的经典之旅的一部分,如图1所示。 载荷图是在正常运输服务期间在船上获得的[23]。 参考游览船也在图1中示出,其总长约25米,宽约5米,吃水约1.3米,载客100人。 最大巡航速度约为15公里/小时。 考虑到交通状况和船舶尺寸,采用功率为160 kW的单个柴油发动机,能够发展每种运行条件下所需的所有功率 [23]。
在船的典型作业期间的四个主要操作在图1中示出。在巡航速度(第一和最后阶段),由于以恒定速度转移所需的几乎恒定的功率,动力学非常缓慢,仅考虑环境影响。对于靠码头
图1游览船载图,往返,船在阿尔斯特湖,一站汉堡,德国
操作,负载图表呈现最快的动态变化,并且功率在0和100kW之间在几秒钟内变化几次。
这些变化是由于电驱动推进器的操作,其操作包括一系列启动和停止,而没有任何软启动/停止装置。在靠码头之后,上下乘客的待机阶段,没有牵引系统的任何能量消耗。最后,离岸阶段是需要最大功率的阶段,因为它使船从准停机到其巡航速度。在该特定阶段期间,发生电驱动推进器和推进电动机的操作的组合,这导致在250s期间需要的巨大的峰值(110kW)的功率。
分析图1所示的负载图,完全匹配的柴油-发电机的尺寸必须确定为在船舶操作的所有阶段期间提供所需的能量,并响应功率瞬变。因此,发电机将容量冗余配置以具有如功率负载图所需的大的动态响应。然而,可以考虑能量存储元件以减小发动机 - 发电机的尺寸并且提高其效率。在本文中,使用串联混合拓扑结构以利用其特性以获得最佳性能。图2描述了船载直流母线分配系统的单线功率图。该选择的组合包括这种混合系统的典型组件和模块。提出了电池和SCs以减小柴油发动机发电机的尺寸并且提高整体效率。为了耦合电池和SCs,可以使用几种拓扑,即被动混合,半主动混合,串联主动和并联主动拓扑[18,24]。 SCs的使用旨在减少由电池系统呈现的一些主要缺点。在这种情况下,由DC链路请求或提供的功率瞬变仅由电池组支持,并且在其操作期间导致高电流应力水平。
在[18,24]中给出并讨论了用于车辆应用的多个能量存储应用中的主要拓扑的概述。部分接耦配置通常被认为是最有利的解决方案,例如,将直流母线电压与电池关联,并只应用变换器来控制SCs的功率[18]。然而,从实际的角度来看,如果电池组电压可能不匹配电机逆变器额定值,则该配置不总是可行的。此外,船动力系统具有高压牵引驱动器和具有大量串联的电池/模块的电池组,导致技术困难和电池/模块均衡问题。因此,对全被动电池/ 电容拓扑结构的开发已有越来越多的兴趣,以用于铁路,船舶和重型车辆的高功率需求[24]。在这项工作中,电池和SCs直接并联连接,全局ESS通过一个DC-DC转换器连接到直流母线。
该单个DC-DC转换器的使用较小且成本低于全解耦拓扑,同时仍允许实施控制层以执行间接能量管理策略。该策略基于DC链路电压的稳定性,其补偿了经典的被动拓扑的一些缺点并且减小了电机驱动损耗。
为了有助于未来的燃料效率游览船,关于电力需求的动态,系统复杂性,能量存储元件的商业可用状态和投资,提出了被动混合拓扑。此拓扑使用电池和SCs包直接并联,与一个双向DC / DC转换器相连。这种配置使得在充电和放电情况下电池电流变化更平滑。在这种拓扑中不涉及主动功率管理,因为每个能量源对于负载需求的能量贡献由能量存储元件的内部电阻限定。
2.2设计ESS
如前所述,船舶能量管理的第一种方法是基于柴油发动机发电机和ESS的组合,使用通过被动混合拓扑耦合的电池和SCs并联。对于常规推进船,推进发动机尺寸必须通过峰值功率需求的值来建立。然而,对于由混合动力系统馈送电力推进的船舶,应考虑不同的选择。例如,关于串联混合架构,提出了更适合的设计标准。该标准确保柴油发动机发电机馈送的平均功率为其操作图的最大效率点工作的平均负载功率。该操作点在所有任务周期中以恒定的速度和功率发生。同时,ESS响应于功率需求的变化,并且在操纵操作期间提供超过的功率,并且还在待机阶段期间和当负载所需的功率低于其平均值时存储由发电机产生的能量。操作周期所需的平均和峰值功率从图1所示的负载图的分析中推导出。
图2船用直流混合动力系统单线线路图综述
考虑作为具有所有典型的参考周期的一部分操作阶段(图1),持续时间T,其余部分
巡航以恒定速度实现,因此巡航阶段是延伸,这部分船舶运动不改变平均值和图1所示的所需功率的峰值。循环期间的估计ESS功率从船舶负载Pdem的功率需求(参见图1)与其分配给发电机的平均值之间的差异获得,如(1)中和图3中所示。
(1)
功率需求的平均值为40.8kW,并且据推测,柴油发动机不断地产生功率并且功率损耗可忽略,在循环结束时,进入ESS的存储能量等于其初始值。
必须由ESS,提供的剩余瞬时功率是通过直接并联耦合电池和SCs的被动混合拓扑提供。关于两个所选择的能量存储元件(具有相对高的比能量和其它具有高比功率的能量存储元件)的混合的主要目的,频率分解由于其特性而本质地发生,从而通过两个存储元件分配ESS功率需求。 ESS功率需求分为两个部分:低频变化分配给电池,高频功率变化由SCs[25]支持。
通过电池和SCs组合适的组合,可以调整功率分离以获得由(2)给出的高通滤波器以确定SCs的功率,并且差分结果为电池的功率, ,如(3)
(2)
(3)
其中是电池和SCs组的并联连接的等效电路的时间常数,取决于电池和SCs的内部电阻以及SCs的电容值。 s是拉普拉斯算子。
该方法的主要目的是选择导致处理ESS功率的高可变性内容的SCs所请求功率的时间常数,而平均功率由电池提供。
为了选择最适合的,基于电源特性的知识和研究的应用来进行微调过程。 为此,使用三个标准。 第一个与电压相关,其中ESS的标称电压及其最大压降是关于混合拓扑和标称DC链路电压的主要约束。 第二是考虑到其放电和充电过程,对能量存储元件请求的最大电流。 第三个与在所研究的操作周期期间所选择电源中的能量行为相关联。
2.2.1电压约束:对于尺寸测量程序,通过串联连接几个电池以形成分支和并联连接的多个分支来获得能量存储元件。由于使用的推进系统特性,DC链路电压被调节到560V。关于这个值,使用大量电池单元串联仍然是在商业应用中的巨大挑战,例如混合电动车辆和光伏电网连接(150-300 V)。另一方面,所使用的混合拓扑迫使电池和SCs组具有相同的电压电平,并且两个能量存储元件的最大电压必须匹配。
在深度放电期间,SCs中的电压变化可能是最大的。然而,电池中的电压变化小得多并且限制了SCs的使用。因此,电池的完全充电电压值在其SoC为100%时发生,并且应当与SCs的最大电压匹配。使用考虑的拓扑,SCs的操作范围由电池的最大和最小值给出。当SoC处于其最小可接受值(通常为20%)时,发生最小值。这可以适合使用SCs的最大范围的更高效率。当它们的运行在电压最大值和其半值之间变
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138192],资料为PDF文档或Word文档,PDF文档可免费转换为Word

