英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
集成PLC模糊PID Simulink实现AVR系统
摘要:在改进发电系统的瞬时响应中,精确地自动控制是关键。我们使用MATLAB和可编程序控制器(PLC)设计了一个模糊比例积分微分(PID)控制器,用于自动电压调节器(AVR)系统中的设定电压控制问题。该控制器旨在通过调节发电机励磁电压到期望的范围内,在任何负载和运行条件下都可以始终保持端电压不变。主电压控制系统采用PLC实现AVR动作。模糊控制器结合遗传算法(GA)、径向基函数网络(RBF-NN)识别和模糊逻辑控制,用以确定AVR系统中的最优PID控制器参数。各种操作条件下的RBF调整被用来开发Sugeno模糊系统的规则库。模糊PID控制器(GNFPID)被进一步设计用于PLC中传送(STEP 75.5),来完成具有系统响应的AVR系统。两个发电机端电压控制和励磁电流之间的固有相互作用被揭示出来,GNFPID控制器根据这个相互作用配置控制信号,本文是通过降低端子电压控制过程中的电压误差和振荡来配置。我们通过在同步发电机的实际AVR系统中测试提出的模糊PID控制器来提高瞬态响应,实现了出色的电压控制性能。
关键词:模糊逻辑 PLC PID STEP 75.5 电压控制
1、介绍
自动化控制系统在科学技术中被普遍使用。工程控制中使用的典型硬件设备是可控制众多工业系统的可编程逻辑控制器(PLC)。为了实现PLC而从MATLAB到STEP 7 5.5的Simulink子系统的调用使用了一系列控制循环,负责维护流程的卓越操作随着现代流程工厂不断增长的困难而大大增加。因此,控制系统的建模和仿真成为多方面的。复合系统中的主要挑战是极端的非线性和控制回路间的相互作用,使建模变得困难。PLC被用来控制工厂或工业设备的水和废物控制,能源,油气炼制等等。一般来说,采用PLC开发了一种模糊PID控制器,用于解决主要压力采集系统中设定点压力控制的问题。洪博等成功地把智能分层协调控制策略应用到中国的300MW锅炉水轮机组中。
扎德介绍的理论涉及到几个参数的疑问和模糊相关信息。AVR系统的主要目的是通过调整发电机励磁电压来控制端电压。必须在任何负载条件下始终跟踪发电机端子电压将电压维持在预定的限制内。尽管在开发先进控制方案方面做了大量的努力,但是经典的集成PLC-Fuzzy PID Simulink实现的AVR系统的控制还远未被理解。具有差分,比例和积分系数的PID可以最佳地控制AVR系统。计算技术如遗传算法和模糊逻辑用于分析解决方案。开发了用于确定AVR系统中最佳PID控制器参数的调谐模糊逻辑方法,以在各种操作条件下获得在线PID参数。
明林设计了一个PID模糊控制器,采用FPGAv。前馈模糊PID控制器用于提高高压共轨系统的性能。Sinthipsomboon等人开发了混合模糊自整定PID控制器,通过适当调整系统参数来提高性能。改进的模糊PID控制器用于控制无刷直流电机转速,展示了Takagi-Sugeno-Kang(TSK)型全尺度模糊PID控制器的设计和详细的稳定性分析,报道了用于控制波动和提高干燥温度的参数自设模糊PID算法,实现了基于DSP的改进的模糊PID控制算法。实现了线性二次调节器(LQR)方法,通过选择合适的加权函数来提高通用二阶系统PID控制器的可接受性能。开发了基于具有模糊限流器的RBF神经网络的自调节PID跟踪控制器,以操纵电机并节约能源。采用模糊半径基函数(f-RBF)神经网络控制PMSM伺服系统,采用强适应能力和非线性近似能力优势的方法。张等人设计了适用于实现实时操纵的单神经元网络车辆稳定性自适应PID控制的新算法。Kun等人采用激进基函数(RBF)来开发一种称为直接驱动永磁直线同步电动机(PMSM)的最佳PID控制器。
AVR用于通过调节发电机的励磁电压来控制端子电压,而内部AVR系统的最佳控制由PID控制器执行。PID是优选的,因为它们的结构简单,接近最佳性能,在宽范围内的鲁棒性和工业过程中的轻松实现。它们可以很容易地被现场工程师理解,并且可以与Sugeno模糊逻辑模型规则相结合,通过GNFPID控制器的遗传算法获得RBF-NN调整。此外,从MATLAB到STEP 75.5的Simulink子系统的调用可以集成到PLC。PLC控制系统专为工业环境应用而设计,具有出色的稳定性和可靠性。PLC的引人注意的特点是简单,灵活,简单的系统配置,低成本,低维护和运行成本,使其适合实施。PLC是一个专门的计算机,将一组输入与传感器相连接,一组输出到执行器可以通过执行逻辑,排序,定时,计数和算术等各种功能来控制工厂。PLC控制系统是一种多功能系统,由几台PLC和计算机组成,用于操作。我们通过将PLC组合为一个硬件控制单元来增强系统响应,通过将Sugeno模糊系统规则库和AVR系统模糊PID控制器(GNFPID)与STEP 75.5进行集成来报告新颖的设计方法。
本文的结构如下。在“径向基函数网络”一节中,RBF-NN的概念通过RBF-NN的在线学习算法进行自动重新调整应用于PID参数,将系统误差降至零。“自动电压调节器”部分涉及AVR系统建模和控制器参数优化。 提出的用于解决PID控制器参数优化问题的GA在“建议GA”部分中给出。Sugeno模糊模型描述了Sugeno模糊系统,用于确定不同运行条件下的PID控制器参数。 本应用的功能机制在“功能应用机制”一节中说明。设计基于PLC的模糊控制器的神话和实验结果在“结果与讨论”一节中进行了分析。结论总结在“结论”一节。
2、径向基函数网络
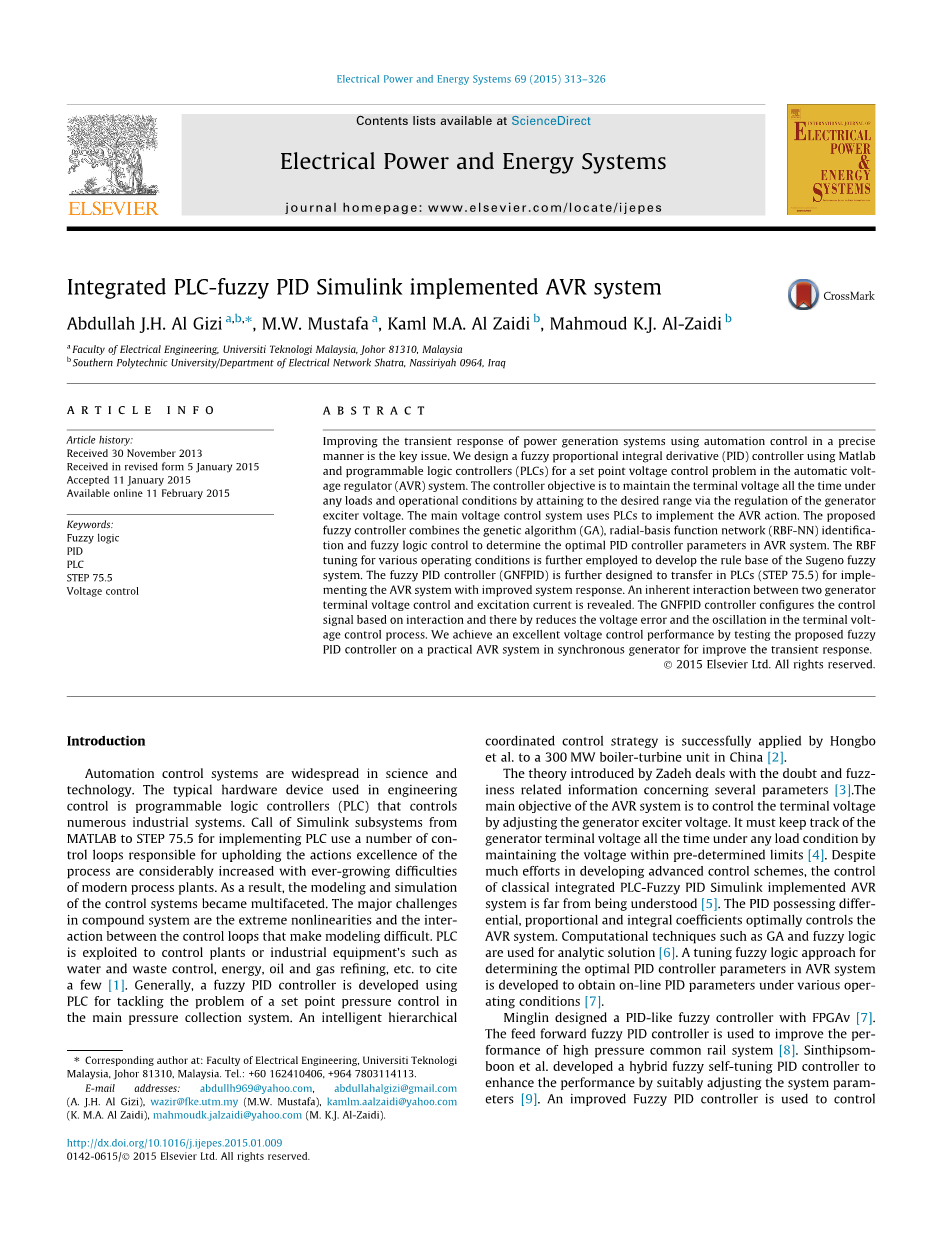
AVR的外环是基于径向基函数神经网络的自调节PID电压控制器,具有适应不确定的负载和系统条件的能力。穆迪等人提出了一种具有单一隐层的前馈双层RBF神经网络,以模仿人类思维中限制性调整的系统布置。RBF神经网络在高斯核函数的中心附近产生最强的响应,其中输入数据空间中的每个隐藏节点可以被认为是局部检测器,并且RBF神经网络被认为是受控过程的局部估计模型。此外,RBF神经网络的输入样本不需要特殊分布,RBF具有快速收敛的在线学习。因此,用于实现实时操纵的控制领域集中在神经网络上。利用RBF来实现控制器的最佳参数,以保持零系统错误。径向基函数神经网络的示意图如图1所示。
图1. RBF神经网络结构示意图
基于自适应PID的RBF的更新算法可以表示为:
通过RBF在线学习算法自动重新调整诸如积分增益(Ki),比例增益(Kp)和微分增益(Kd)的PID参数,以保持系统误差?Matlab提供的两个命令即Newrb和newrbe 用于设计RBF神经网络,其中Newrb一步一步地添加神经元,直到目标以较短的训练时间以最小的误差命中,并且newrbe以零错误非常快地设计网络。在训练过程中,实现的步骤是:(i)隐层中的神经元数,(ii)每个维度中每个RBF函数的中心的坐标以及每个RBF函数的半径(扩展)。
3、自动电压调节器
AVR系统建模
如图2所示,主要由放大器,励磁机,发电机和传感器组成的AVR系统用于同步发电机,以保持不同电平的恒定端电压。AVR组件的传输功能总结在表1中。
发电机无功功率负载的增加伴随着端子电压的下降。使用PID控制器来最小化误差并实现改进的动态响应。
图2. AVR系统与PID控制器的框图
表1AVR组件的传递函数
PID控制器有效地用于将操纵变量置于设定点。PID控制器的传递函数由下式给出,
(4)
AVR很好的在稳态过程中改变电压电平,并在短暂的时间内减少电压振荡,从而延缓系统的整体稳定性。具有PID控制的AVR系统的传递函数由下式给出:
(5)
控制器参数优化
系统可接受的操作由最佳PID控制器参数的整定决定。此外,PID控制器参数的整定问题被认为是优化问题。目标函数产生,
(6)
MinF(Kp,Kd,Ki)组合了瞬态响应计数上升时间过冲,稳定时间和稳态误差。 通过选择加权因子b的合适值可以实现设计者需求的满足。因此,优化问题归结为以下约束,
(7)
Devaraj等人,应用RGA来优化值控制器参数,并引入提出的GA。
4、拟议GA
GA被认为是解决优化问题的有效和高效的技术。与诸如随机搜索和模拟退火的优化技术相比,GA性能优于避免局部最小值被认为是非线性系统中的关键问题。
遗传算法算子
遗传算法基于自然选择机制,通过交换信息来获得最优解,产生适合度的生存并产生估计的解。在生成初始种群后,GA通过使用繁殖,交叉和突变产生后代来发现新的个体运营商,取代了老一代,形成新一代。一旦产生了几代,算法就会找到最好的染色体,代表最佳或接近最优解。
利用交叉,繁殖和突变等主要GA运算符。通过对这些运算符应用各种概率来控制收敛速度。交叉和变异算子的设计由于对遗传算法性能的巨大影响而得到认真的管理。所提出的GA中使用的遗传算子的细节如表1所示。
再生产
在繁殖过程中,个人根据其适应度的选择,适应度越高,下一代选择个人的机会越多。利用排序方法,健身平衡选择和锦标赛选择等三种主要选择方法。 在这项工作中,我们采用比赛选择方法,从人群中随机选择lsquo;nrsquo;个人,并选择最佳值进行额外的遗传处理。重复执行该过程,直到配合池被填充。
交叉
GA中全局搜索的属性主要由交叉算子决定,该算子结合了双亲染色体来生成新的染色体。所选概率的范围通常在0.6和1.0之间。交叉算子的一个有趣的特征是生成的染色体与两个亲本的位置之间的关系。如果父母彼此靠近,所产生的新染色体仍然靠近父母。相反,搜索更有可能是随机的。
突变
将新染色体插入群体进行突变过程。变异随机染色体信息的变化不大。然而,对于不一致的突变,变量在下限和上限之间具有一致的随机数。在本研究中,使用“均匀突变”算子。
GA优化AVR PID参数
通过PID的GA调谐获得最佳PID控制器参数。在这个过程中使用了两个主要的主题,如选择变量的符号(可变表示)和适应度函数的排列。
变量表示
所有候选人的解决方案都是在遗传种群中产生的。PID控制器调谐问题的解决方案包括参数Ki,Kp和Kd。解决方案变量的直接表示减少了存储人口的计算机空间。 从直接调整GA到RBF程序中获得的这些参数的值对于PID控制器参数的最佳调谐对于AVR系统的主题工厂运行是重要的。
适应功能
根据其适应度来评估人口中每个候选人的表现的解决方案,该适合度被定义为最大化的非负值。 健身与目标函数的值直线相关。个人评估的参数集可以使用方程(6)来确定绩效标准。个人适应度的值通过相互计算的呈现标准的结果来计算。适应度函数是方程(6)中给出的相互标准F(Kp,Kd,Ki)的表示。因此,等式(6)中性能标准的最小化可以转化为适应度函数的最大化。
其中k是常数,ITAE是乘以绝对误差值的时间积分。这用于扩大1 / F的值,其通常较小,使得染色体适应度值出现在更宽的范围内。
5、Sugeno模糊模型
最近,Devaraj等人使用模糊集理论,其中变量是一个或多个集合的成员,其隶属度指定度。模糊规则表示为,
其中A和B是前提中的模糊集合,x和y是输入变量,f(x,y)在结果中是一个清晰的函数。每个变量模糊集由适当的隶属函数表示。模糊逻辑系统的核心由一组这样的规则组成。对于精确的输入信号条件,模糊系统定义要触发的规则,然后计算有效输出两步。首先,为每个规则获得输入eth;wiTHORN;的隶属函数的最小值,其中该值是特定规则的触发值。其次,总体产出由下列各项规定的个别规则产出的加权平均值计算,各种运行条件下的PID控制器参数由Sugeno模糊系统确定。
数据类型
由于STEP 7,WinAC ODK和实时车间嵌入式编码器的不同数据类型使用,在程序接口上仔细执行类型转换。WinAC S2O向导可识别RTWEC C/C 程序的数据类型,并适应WinAC ODK程序和STEP 7程序(SCL源)中的数据。在执行WinAC S2O向导期间执行类型转换。用于将数据从Matlab传送到PLC的软件是MATLAB V7.11(R2010b),Simulink V7.6,Real-Time Workshop V7.6,Real-Time Workshop Embedded Coder V5.6,Microsoft Visual Studio 2008 Professional ,STEP V5.5,S7-SCL V5.3,WinAC ODK V4.2和WinAC RTX 2010在PC系统(SIMATIC IPC427C)上。在本实验中使用包含SIMATIC IPC427C(MICROBOX PC)的硬件。使用S7程序配置PG / PC接口以太网(192.168.2.200)和IPC
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139297],资料为PDF文档或Word文档,PDF文档可免费转换为Word

