英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
多个无人水下船舶的模拟器开发
Marvin Roe Naval Research Laboratory Stennis Space Center, MS 39529-5004, USA
228.688.3947 mroe@nrlssc.navy.mil
Brian Bourgeois Naval Research Laboratory Stennis Space Center, MS 39529-5004, USA
228.688.5321 bsb@nrlssc.navy.mil
Patrick McDowell Naval Research Laboratory Stennis Space Center, MS 39529-5004, USA 228.688.4823 pmcdowell@nrlssc.navy.mil
摘要:本文将介绍一种可以模拟多个无人水下船只(UUV)运行的系统的开发。该模拟器旨在支持位于斯坦尼斯航天中心的海军研究实验室(NRL)的定位,导航和定时(PNT)团队的研究工作。在本文中,我们将讨论一个支持这一研究的模拟器的功能和架构。我们的方法是使用PC上的网络,并在每台PC上运行船只模拟。一个额外的PC将主持我们的中央仿真过程,将显示模拟进度,并作为共享数据和通信的中央控制。这需要创建一个灵活的分布式实时系统的能力,可以在团队环境中同步船只交互。必须允许模拟和实际船舶类型的各种组合来支持不同的团队成员角色和我们的分阶段开发方法。我们将详细介绍为我们的模拟器提出的架构,并讨论其运行。最后,我们将介绍我们对原型实现的性能的观察,并讨论我们未来的开发和测试计划。
类别和主题描述符:分布式实时系统,自主性,模拟,水下船只
一般条款:性能,设计,可靠性,实验,人为因素,标准化,理论
关键词:无人水下船舶,自主,模拟,导航,位置,时间,通讯,声学
1介绍:The Position, Navigation and Timing (PNT)团队正在进行研究,开发必要的通信,智能和多船导航系统,以支持无人水下船只
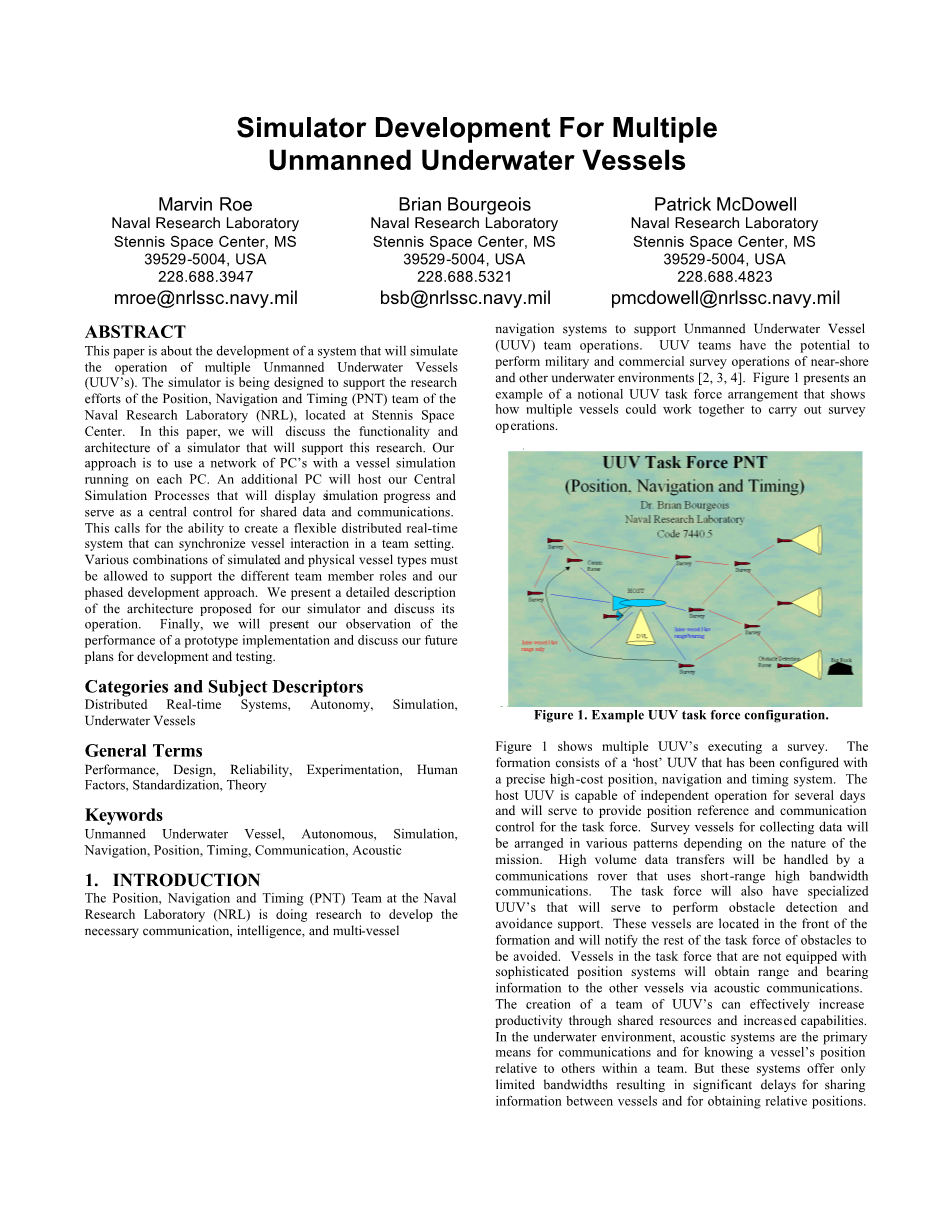
(UUV)团队运作。 UUV团队具有执行近岸和其他水下环境的军事和商业调查业务的潜力[2,3,4]。 图1显示了一个名义上的UUV工作组安排的示例,其中显示了多个船舶如何共同合作进行勘测操作。
图1显示了多个UUV执行调查。信息由“主机”UUV组成,已经配置了精确的高成本位置,导航和定时系统。主机UUV能够独立运行几天,并将为工作组提供位置参考和通信控制。用于收集数据的调查船只将按照任务的性质进行各种排列。大容量数据传输将由使用短距离高带宽通信的通信漫游器处理。专责小组还将有专门的UUV,用于执行障碍物检测和回避支持。这些船只位于地层前方,并将通知其他工作队的障碍物避免。没有配备复杂位置系统的工作组中的船只将通过声音通信向其他船舶获取距离和方位信息。创建一个UUV团队可以通过共享资源和增加的能力有效提高生产力。
在水下环境中,声学系统是通信和了解船只相对于团队内其他人的位置的主要手段。但是,这些系统只提供有限的带宽,导致在船只之间共享信息和获得相对位置的显着延迟。这对于作为一个团队运作的船只的航行提出了挑战,因此需要高水平的自主权。 本研究将探讨UUV团队所需的通信,定位,导航,时间安排和自主性方法。 确定这些方案对可用带宽,船数,地层大小等的敏感度是正在开发的模拟器的关键功能。 在第2节中,介绍了研究方法和支持它所需的模拟器功能的讨论。 第3节介绍了一个概念架构设计,以支持第2节的研究方法和功能需求。第4节介绍了LABVIEW中原型实现的目标,功能,构造和执行。 最后,第5节介绍了对未来开发模拟器计划的讨论。
2模拟器功能
在这项研究中采取的方法将开始于观察人类的循环,其中船舶状态知识以图形显示,人类驾驶船只。 这些意见的结果将用于通过开发智能的,基于目标的例程来开发无人能力,以取代人类飞行员。 本节将介绍将在仿真器中内置的功能以支持此功能。
2.1目标
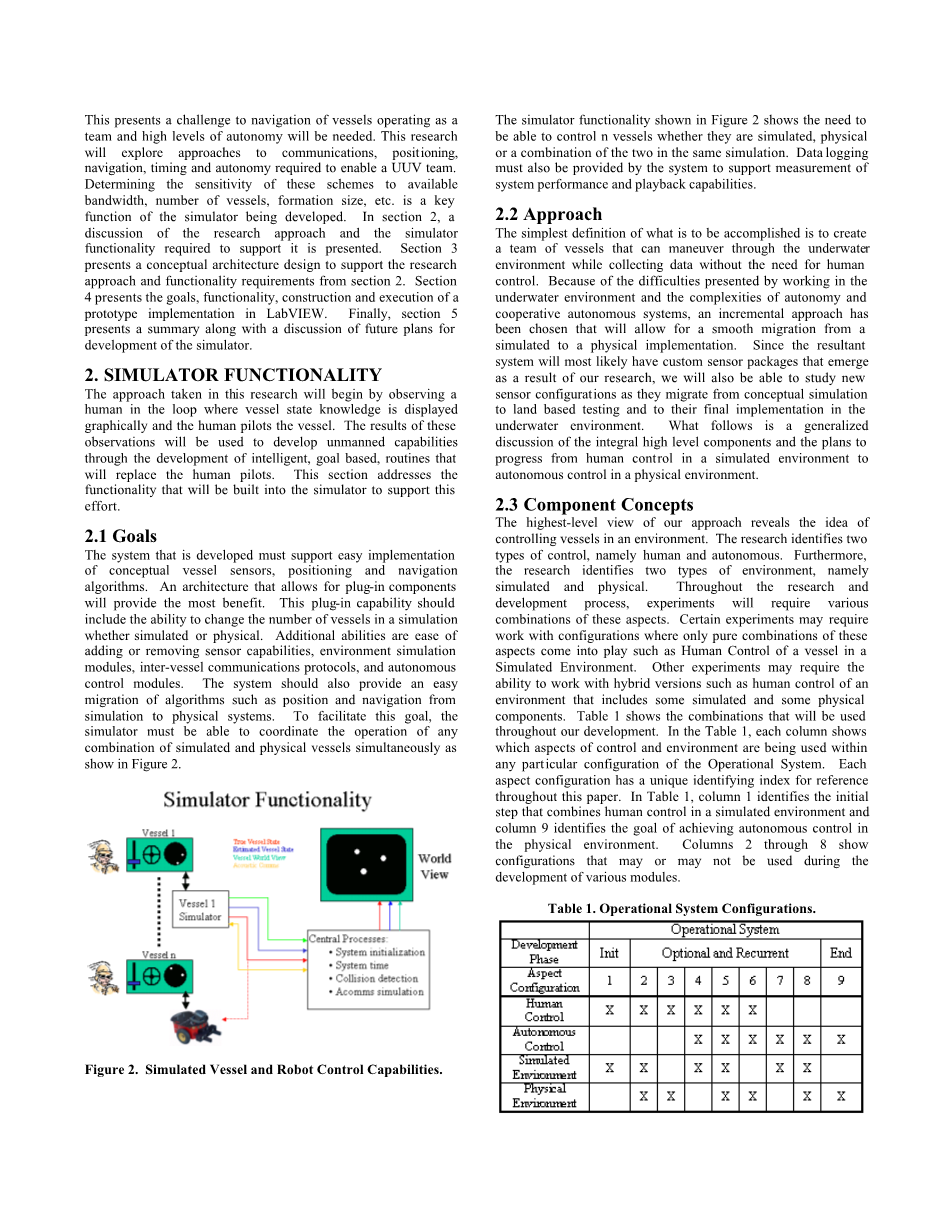
开发的系统必须支持简单实施概念船舶传感器,定位和导航算法。允许插件组件的架构将提供最大的优势。该插件功能应包括在模拟中改变船只数量的能力,无论是模拟还是物理。额外的能力是容易添加或删除传感器能力,环境模拟模块,船间通信协议和自主控制模块。系统还应提供诸如从模拟到物理系统的位置和导航等算法的轻松迁移。为了实现这一目标,模拟器必须能够同时协调模拟和物理容器的任何组合的操作,如图2所示。图2.模拟船只和机器人控制能力。图2所示的模拟器功能表明,在同一模拟中,需要能够控制n个容器,无论它们是模拟的,物理的还是两者的组合。系统还必须提供数据记录,以支持系统性能和播放功能的测量。
2.2方法
要实现的最简单的定义是创建一个能够在不需要人为控制的情况下收集数据的情况下,通过水下环境进行操纵的船只。由于在水下环境中工作的困难以及自治和合作自主制度的复杂性,已经选择了一种渐进的方法,可以从
模拟到物理实现。由于所产生的系统最有可能由于我们的研究而出现了定制的传感器封装,因此我们还可以研究新的传感器配置,从概念模拟到陆基测试,并在水下环境中进行最终的实现。以下是对整体高层次组成部分和计划的一般性讨论。
2.3组件概念
我们的方法的最高层次的观点揭示了在环境中控制船只的想法。研究确定了两种类型的控制,即人与自治。此外,研究确定了两种类型的环境,即模拟和物理。在整个研究和开发过程中,实验将需要这些方面的各种组合。某些实验可能需要使用这些配置的工作,只有这些方面的纯粹组合才能发挥作用,例如模拟环境中的船只的人为控制。其他实验可能需要使用混合版本(如包含某些模拟和某些物理组件的环境的人员控制)的能力。表1显示了将在整个开发过程中使用的组合。在表1中,每列显示了操作系统的任何特定配置中正在使用控制和环境的哪些方面。每个方面的配置都有一个独特的识别索引,供整个论文参考。 在表1中,列1标识了在模拟环境中组合人类控制的初始步骤,第9栏标识了在物理环境中实现自主控制的目标。 专栏2至8显示了在各种模块开发期间可能使用或可能不使用的配置。可以为表1中描述的每个场景构建系统。不幸的是,这将需要开发和维护多个项目的开销,并且将提供较少的比较系统之间的结果的能力。必须修改新模块,以便在每个系统从模拟进程到物理实现过程中进行交互,如果需要回到以前的级别进行进一步开发或测试,则会重新修改。良好的设计将允许任何给定的模块有必要返回到操作系统的先前方面配置的能力。具有很好的混合这些高级概念组合的模拟器将在达到最终系统时获得更大的成功和生产力。
3.模拟器架构
在本节中,我们将考虑我们的控制和环境思想,以及我们如何将其扩展到高层次的概念架构。
3.1Vessel概念
为进一步探索架构,介绍了船舶的高层次概念。一个容器由传感器,执行器和一个控制系统组成,它们在与环境进行交互时进行管理,如图2所示。传感器被视为作为来自环境的输入的装置,例如速度和轴承以及作为通信系统的输入部件。执行器被视为作为终端执行器的装置,提供通信系统的机动性和输出部件的推进系统。传感器和执行器模块将在需要时为传感器和执行器硬件驱动器提供通用接口,并提供相对于环境模拟执行功能的地方。
3.2高层概念
考虑到控制和环境方面以及概念船舶,这些想法可以被排列成一个图表,其中显示了一个架构关系,它将支持表1中所示的任何所需的组合,并在第2.3节。
图3是这些片段如何组合在一起的说明。提供了组件的一般描述及其布置,以解释此架构如何工作。在讨论之后,将介绍具体示例,其中将说明将基于此架构设计的操作系统配置。前两个例子将探讨代表架构灵活性的终点的实现。这两种情景是模拟环境中的人为控制和物理环境中的自主控制。以下将通过一般例子来说明两个端点之间系统迁移的阶段。该架构的最终讨论将针对这个架构如何支持PNT团队目前正在进行的研究和开发。
3.2.1组件概述
在探索具体示例之前,给出了图3中的图形组件的一般描述。该图显示了一个容器的高级组件及其与物理和模拟环境的连接。附加的船只将有自己的连接和共享物理和中央的模拟环境。图中连接各种组件的实线A至F表示软件连接或集成。这意味着通过实线连接的组件可以紧密集成或驻留在单独的机器上。包括虚线G至K以完成概念思想,作为机器人,屏幕显示和操作员通过物理环境进行交互。根据操作系统的配置,模块可以执行处理或充当通过以完成系统电路。传感器模块为自动控制模块提供了一个通用的API。传感器的驱动程序无论是模拟的还是真实的,将在这里添加该模块还包含传感器模拟环境模块。传感器模拟环境模块提供了一个地方,用于插入任何额外的处理,以产生对传感器值的所需环境影响。自动控制模块接收人控制的输入,提供船舶显示并执行给定船舶的主要处理功能。执行器模块为自动控制模块提供了一个通用的API。驱动系统和任何其他终端执行器的驱动程序,无论是模拟还是实际,将在此处添加。该模块还包含执行器模拟环境模块。执行器模拟环境模块提供了一个地方,用于插入任何额外的处理,以产生所需的执行器对环境值的影响。人机控制模块将自动控制模块中的输入,键盘或其他输入设备表示为自动控制模块。中央模拟过程包含了诸如共享状态值之类的多个容器的团队交互的所有必要支持。它包含中央模拟环境和世界观显示模块。中央模拟环境模块提供了一个地方,可以插入任何额外的处理,这是为了在不同的船舶上的执行器之间产生所需的环境影响所必需的。世界观显示模块将提供每艘船的真实位置和航向以及每艘船只对其位置的最佳猜测的图示。物理环境云表示在现实世界中执行器和传感器的相互作用。它提供了一种方式来记录机器人或UUV或计算机屏幕的执行器的效果与传感器或操作者“看到”的结果之间的关系。重要的是要认识到,概念图的线条仅代表高级关系。它们不一定描述数据流的方向或数据流的时序。在执行期间,它们在组件或整个系统之间也不会显示任何类型的定时或同步。如果在检查其在船舶显示器上的位置的同时控制陆基机器人的操作者的示例被检查,这将是显而易见的。从物理环境的角度来看,机器人将会移动,船只显示更新,操作员控制操纵杆,并通过观察机器人和船只显示所有的同时观察结果。所有这一切同样适用于架构的其他组件。正在进行的研究不限于确定如何完成各种任务,而且还限定最佳地提供解决方案的这些任务的同步和/或异步执行。
3.2.2模拟环境中的人为控制
该示例基于表1中的Aspect配置1,并将是在模拟环境中的人类控制下的单个船的说明。从图中的人体控制泡沫开始,这表示操作员使用某些类型的输入设备,例如键盘或操纵杆,将翻译最终驱动船只的控制信号。图中的路径D表示软件连接或输入设备与自动控制结构的集成。
对于这个例子,自主控制结构将作为输入信号到值或命令的传递或基本转换,这些转换或速度变化可以发送到执行器。一旦完成任何必要的转换,信息将通过路径F发送到执行器结构,并直接发送到执行机构模拟环境气泡中,在该气泡中进行必要的计算,以确定如果实际情况下传感器将会看到什么结果推进系统存在。对于这个例子,我们会说我们的船只有罗盘和GPS系统。这意味着执行器仿真环境将必须计算得到的罗盘方位和GPS坐标,以便它们可以通过路径A传递到传感器模拟环境气泡。由于模拟值是在执行器侧进行计算的,因此传感器模拟环境气泡将不会改变传入值。接下来,传感器值将通过路径E并进入自主控制结构,其中值可用于显示船只当前位置和航向。为了完成概念连接,操作员将通过路径I,最后通过路径K将物理环境通过物理环境查看作为交互作用的船只显示器,将其更新的位置和航向作为其性能的反馈。
3.2.3物理环境中的自主控制
该示例基于表1中的Aspect Configuration 9,并将在物理环境中对自主控制下的单个船舶进行说明。在这个例子中,该船是具有两个驱动轮和平衡脚轮的陆基机器人(ActiveMedia先锋2DX),物理环境是我们的水下导航控制实验室(UNCL)。从图中的自主控制气泡开始,通过路径E获取的传感器信息的评估将用于确定将通过路径F发送到执行器的命令。随着命令的处理,这种情况下的驱动轮将影响机器人通过路径G与物理环境的相互作用。传感器(例如编码器或指南针)将通过图中的路径H感测致动器动作的影响,并且能够使该更新的信息可用于自主控制结构用于进一步的分析。执行器模拟环境和传感器模拟环境模块都不会执行与模拟环境有关的任何修改。
3.2.4观察
这种高级架构将支持操作系统的方面配置的两个方面。在第3.2.3节给出的示例中,用适当的自主控制和陆基机器人的传感器和执行器系统代替UUV将完成该概念。这里应该注意的是,表1中的Aspect Configuration 3和Aspect Configuration 7所示的操作系统可以从3.2.2节和3.2.3节得出。3.3中级操作系统
现在已经探讨了这种设计的灵活性的两个终点,还将提出几个例子,以便更多地说明该架构支持的功能。
3.3.1组合模拟和物理环境中的自主控制
该示例将在第3.2.3节中给出,并将说明该架构如何适应表1中具有Aspect Configuration 8的操作系统。该示例的结尾说明了执行器仿真环境和传感器仿真环境模块将不会执行与模拟环境有关的任何修改。首先要看执行机构模拟环境模块,因为主要着眼于研究水下船只的机动性,所以有机会介绍陆基机器人的更加现实的运动。自动控制系统的命令可以被拦截,以影响船舶加速,转弯甚至停止的速度。一个例子是当接收到从5节到0节速度设置速度的命令时。代替机器人突然停止,可以修改命令的处理以逐渐减慢机器人,直到其最终以更现实的方式停止。对于传感器模拟环境模块,通常会告诉我们机器人旅行多远的编码器值,可以对其进行修改,以便缩放它们,以便可以研究较大虚拟区域的容器性能。例如,可以有效地更改操作配置,而无需更改传感器,自动控制和执行器进程之间的任何命令或处理。
3.3.2人/自主控制和
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139396],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

