英语原文共 44 页,剩余内容已隐藏,支付完成后下载完整资料
光伏并网发电系统电磁瞬态分析建模与仿真
摘 要
本文涉及并网光伏系统(GCPS)的建模和仿真,以分析其网格接口行为和该系统设计中的控制性能。 通常使用太阳能阵列的简易电路模型来方便地模拟其具有详细数据的固有特性。 GCPS的详细电源和保护控制元件以及其电路已经可由用户定义和内置组件表示,以反应在正常和故障条件下的瞬态,这些由电子电力控制器控制。 该模型已经在PSCAD / EMTDC中构建出来,并构建了一个电力系统瞬态软件包。 提出并分析了广泛的仿真结果,以验证所提出的仿真模型在电磁瞬变分析方面对GCPS的控制和保护性能评估是有效的。
关键词:并网光伏系统;瞬态分析;功率控制;最大功率点跟踪;孤岛效应
- 介绍
太阳能是主要的可再生能源之一。在过去几年里, 太阳能产业高速发展,并扩展到光伏系统的设计和应用更可靠高效的运行,特别是有效功率的研究。 建模和仿真是系统设计中必不可少的部分并且可以确保应用运行良好,导出组件额定值并优化控制器和保护设置(Watson and Arrillaga, 2003)。有的太阳能光伏系统仿真建模已经完成,例如:有关环境和经济分析的太阳能光伏系统建模(Wies et al., 2005)。 基于 I–V 和V–P特性以及实际工况环境分析太阳能阵列特性(Park and Yu, 2004), 最大功率点跟踪(MPPT)功能的改进 (Masoum et al., 2002; Zhang et al., 2000), 和 一个设计简单的单相逆变器动态仿真建模 (Maris et al., 2007)。
本文涉及一个交互式光伏系统网格的建模技术,其在系统设计阶段,能有效评估太阳能光伏系统和电力系统交互运行控制和保护性能。在GCPS中,有效功率范围由太阳辐射和太阳能阵列的固有电压 - 电流特性决定。在这种情况下,电力电子逆变器管理整个系统的控制,保护和与公用电网的接口。因此,对PV系统进行建模需要对控制和保护过程及其电力部件进行详细的描述,从而可以有效地观察在电力控制下的系统动态。
数字时域仿真软件,例如: EMTP, PSCAD/EMTDC, RTDS 和电力系统工具箱,已成为电力设备和系统,设计分析不可或缺的部分。这些程序也几乎适用于需要时域仿真的每个问题。PSCAD / EMTDC是用于研究电气设备和网络的瞬态特性的行业标准仿真工具。其图形化的用户界面使用户能够以图形方式组装电路,运行仿真,分析结果,并在完全集成的图形环境中管理数据。该程序为大多数电厂交流和直流组件和控制提供了完整的模型库。Fortran, PSCAD 和MATLAB,在通过现有模型可视地组合和直观的图形设计编辑器来构建用户定义的模型及编写代码方面十分灵活。它为评估电力网络中新型电力技术的瞬态性能提供了强大的资源(Manitoba HVDC Research Center, 2003; Anaya-Lara and Acha, 2002; Kim and Kim, 2007)。
参考PSCAD/EMTDC描述并实现建模和仿真. 随着模型的提出,综合模拟已实施,根据功率控制特性、并网失败的反应、孤岛效应、电流谐波 这些方面,评估和分析GCPS的特性和动态。
- 用于实用接口的光伏系统配置
图1呈现了一个三相GCPS的典型配置。该系统由一个光伏阵列,二极管,直流电容器,具有谐波抑制滤波器的电压源逆变器(VSI),升压变压器和电网组成。其中从光伏阵列产生的直流电为直流电容充电。电网连接逆变器将直流转换成交流电源,该电源具有与公用电网频率相同的正弦电压。二极管阻止反向电流通过光伏阵列。变压器将VSI电压升高到电网的额定值,并在PV系统和电网之间提供电气隔离。谐波抑制滤波器消除除基本电频率(即50或60Hz)之外的谐波分量。
- GCPS的瞬态分析模型
- 1 光伏阵列
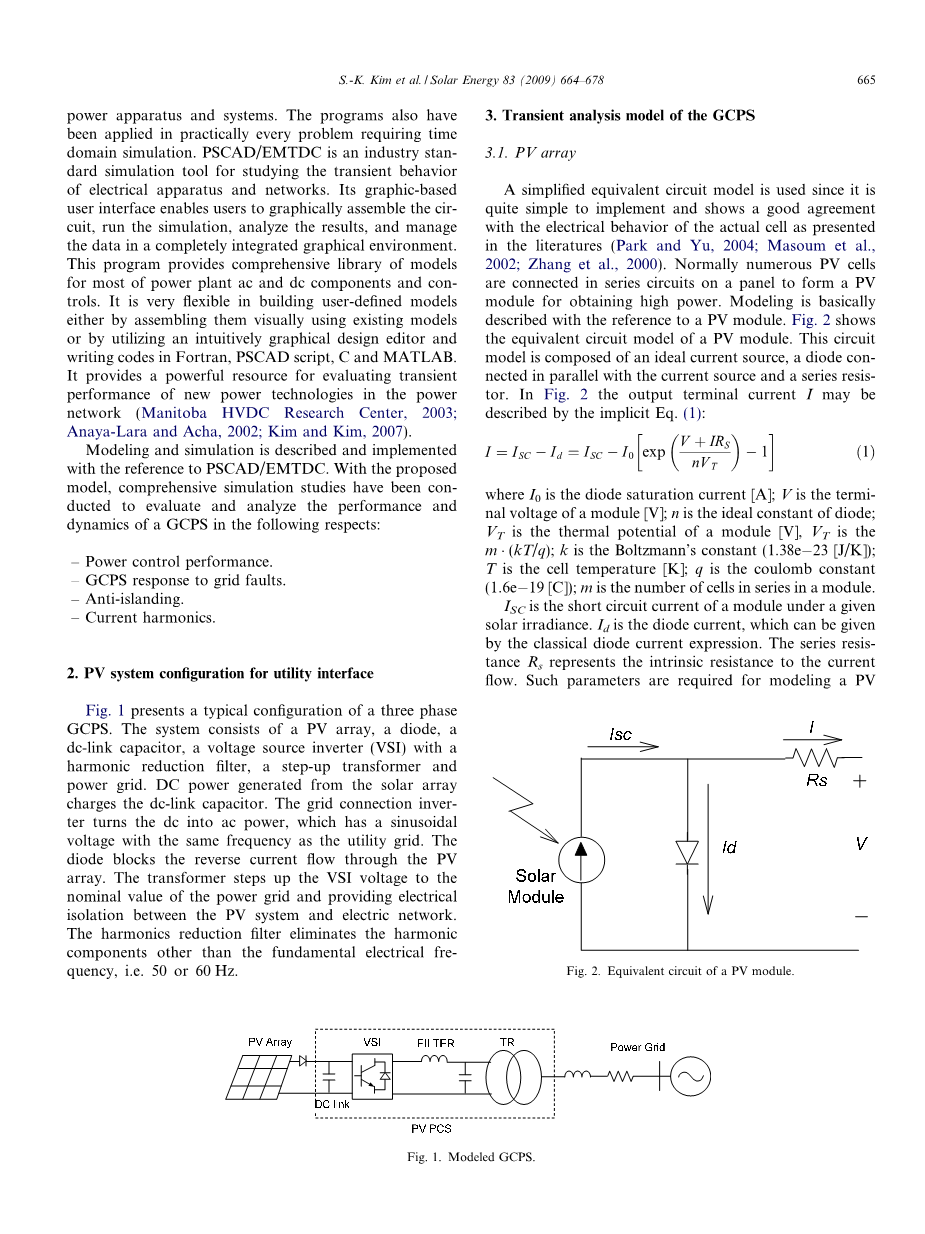
自从简化的等效电路模型,在文献中被提出,能够非常简单的实现和显示实际电池中的电力特性,便被经常使用(Park and Yu, 2004; Masoum et al., 2002; Zhang et al., 2000)。通常来说,许多太阳能电池以串联形式连接在面板上,以获得高电量的PV模块。图2展示了一个光伏模块的等效电路模型。该电路模型由理想电流源,与电流源并联的二极管和串联电阻组成。图2中的输出端子电流可用公式1算出。其中I0是二极管饱和电流;V是模块的终端电压;n是二极管的理想常数;VT是一个模块的热电势;K是玻尔兹曼常数;T是一块电池温度;q是库仑常数;M是模块中串联的电池数;ISC是给定辐照度下模块的短路电流;Id是二极管电流,可以由经典的二极管电流表达式算出;串联电阻Rs表示电路电阻。PV模块建模需要这些参数。它们可以从制造商的数据直接计算,或者通过操纵数据与方程式来推导。(2) - (6)。表1总结了所需的参数和数据。
短路电流ISC取决于太阳辐照度和电池温度T,可由等式(2)得出。二极管饱和电流I0随温度的变化而变化(Zhang et al.,2000),可以由(3)得出。其中Eg是带能间隙[eV],可以由等式(4)描述。将等式 (2)和(3)代入(1)并应用开路条件(即I = 0且V = VOC,图2中的ref),可以获得Tref时的二极管饱和电流I0,ref。在等式 (3)中的温度系数A可以用等式 (5)代入(3)中推得。 可以通过以模块数据表的最大电压Vmp,ref和最大电流Imp,ref代替方程(1)的V和I来获得串联电阻Rs。
光伏阵列由串联并联组合的一组模块组成。 基于公式 (1)和图2的电路,在NS模块串联和NP并联状态下,PV阵列的输出电流IA可由等式(6)表示。其中VA是PV阵列的端电压[V]。
3.2 并网逆变器
图3介绍了光伏并网逆变器的电气配置。 电路模型包括一个反向电流阻断二极管,直流环节电容器、六个IGBT开关逆变器,LC谐波减速器、升压变压器及磁性接触(MC)网格接口开关。逆变器的控制模型将在下一节中讨论。
3.3. GCPS的功率控制
光伏逆变器监测数据传感器的测量和计算,直流转换成交流,光伏阵列的功率调节和电网故障的保护。图4是光伏逆变器控制模型的完整示意图。电源控制器,作为上一级控制器,调节GCPS的有功和无功功率并返回它的q和d轴电流指令,即Iq 和Id,使其输入电流控制器。下一级控制器产生Vq和Vd的期望值和逆变器端子电压的q轴和d轴分量。PWM发生器产生S1-S6的门控信号。保护控制器监控逆变器的端子电流大小Imag,电网侧电压幅值,Emag以及fsys的电网频率,以确定电网故障状况,给MC开关提供脱扣或闭合信号; 当电网故障发生时,控制器将使GCPS与电网断开,并且在特定时间段内,当电网电压恢复到正常水平之后,将系统重新连接回电网。
- 测量和计算: 图5为测量和计算单元, 用来检测三相逆变器电流(Ia,Ib和Ic),三相逆变器电压(Va,Vb,Vc)和三相电网侧电压(Ea,Eb,Ec)以计算逆变器 电压和电流幅度,频率和无功功率输出。 此外,该模块监视PV阵列电流(Ipv)和直流链路电压(Vdc),用于跟踪光伏阵列的最大功率点。电网侧电压Ea同步的信号通过锁相环(PLL)产生参考相位角h,用于abc至dq变换。接口变压器绕组具有Y-Delta;连接,初级侧电压将次级侧电压超前30°,在计算相位角h时必须进行补偿。PLL还提供变频器输出的电气频率。
- 功率控制器:在同步d-q参考系中,逆变器的有功和无功功率可以通过逆变器的q轴电流Iq和d轴电流Id分别控制(Kim和Kim,2007; Machowski等 ,1997),如图6所示。
当Iq为正时,逆变器产生实际功率,对于负Iq,它吸收实际功率。对于正Id,变频器消耗无功功率,当Id为负时,它产生无功功率。 实际功率控制由最大功率点跟踪(MPPT)技术控制,将在本节后面讨论。MPPT产生与实际值V*dc相比较的直流链路电压V dc的期望值。 两个值之间的误差通过比例积分(PI)控制器产生I* q。通常,分布式发电机不允许调节公共耦合点(PCC)的电压并且在功率因数的指定范围内控制其发电。 同样地,通过比较无功功率的期望值和实际值Q*inv和Qinv的差值,输出I*d。q轴电流参考值限制在I*qmin和l* qmax之间,可保护逆变器免受过热以及电流反向流过光伏阵列。 d轴的参考极限I* dmin和I*dmax,可以通过考虑q轴电流范围和变频器热额定值来设定。
- 最大功率点追踪(MPPT):在并网光伏系统中,PV阵列在给定的条件即温度和辐照度下,其工作电压始终对应于最大功率点电压。 为此,已经提出了各种MPPT技术,例如查找表方法,计算方法,扰动和观察(P&O)方法和电导增量(IncCond)方法(Hohm and Ropp,2003; Esram和Chapman,2007) 。 在这种建模中使用了电导增量方法。 如果阵列工作电压V和电流I已知,则发电量为P = VI。 在最大功率点处,dP / dV应为零,dP / dV的符号可以通过公式 (8)得出。 通过判断方程式(7)的符号来确定PV阵列电压的增加或减小。图7介绍了实施电导增量技术的流程。
- 电流控制器:基于反馈线性化的电流控制器(Schauder和Mehta,1993)已经实现。 假设图3中的升压变压器被认为是具有LTR值并且其变换比为N1-N2的电抗器,在同步旋转的d-q参考系中AC侧电路方程可以被写为等式 (8)和(9)。其中Ed和Eq是电网侧电压的d轴和q轴分量,Vd和Vq是逆变器电压的d和q轴分量,x是系统角频率。 在实际应用中,感测电流的差分值可能具有固有的噪声或误差,将这些值直接使用是不可靠的。 还应考虑忽略的电阻和电抗误差。 因此,使用PI控制器,等式(8)和(9)可以转换为等式 (10)和(11)。其中Kp和Ki是PI控制器的比例和积分系数。 基于这些方程,如图8中模拟了一个电流控制器。电流控制器比较d轴和q轴电流分量的参考值和实际值,并为要注入到终端节点的逆变器电压的d轴和q轴分量产生所需的值Vd和Vq。 Vtq和Vtd是V*d和V*q的未调整的期望值,通过高频切换逆变器转换成实际电压。 脉宽调制(PWM)技术广泛应用于工业应用中的高频切换。 在这里,使用了具有若干技术优点的空间矢量PWM(SVPWM)切换(van der Broeck等,1988)。其实施情况的描述将过于详细,超出了本文的范围。
- 保护模块:基本保护功能有,当发生过电流,过压和欠压以及高频和欠频(OV / UV和OF / UF)时,将GCPS从电网中断开。 此外,防孤岛运行也必须纳入保护项目。 上述OV / UV / OF / UF方案能够检测GCPS的孤岛运行。 然而,在PV的情况下,逆变器产生与局部负载平衡,不可能用基本方案检测孤岛,因此至少有一个主动防孤岛方案必须包含在保护中,这将在下面的部分中解释 。
3.4.防孤岛控制
并网光伏逆变器孤岛运行发生逆变器与主用电源断开连接时,光伏逆变器继续为本地负载供电。这种未知的孤岛运行是个危险问题,因为它可能对维护人员,公用事业和最终用户的设备以及公众构成严重危害(John等,2004; Hung 等。2003)。为了建模防孤岛功能模型,使用了典型的活动方案Sandia 频移(SFS)方法(John et al。,2004)。图9示出了SFS算法的框图。从PLL获得的频率通过低通滤波器来确定频率偏差。移位值乘以SFS增益Kf并积分到相位角位移。该角度偏移被加到PLL的参考角,使得在孤岛的情况下可以使PV逆变器的频率超出检测限值。相位偏移周期性地复位,即每半个周期,因为在半周期上逆变器控制频率不同于电网频率。该复位发生在电压过零点。算法的增益设置可以通过对经过调整的RLC负载执行PV逆变器的微小信号分析来确定,这在IEEE929-2000和UL1741防孤
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[140866],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

