英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
2013年第五届智能人机系统与控制论国际会议
基于DSP的无刷直流电机控制系统软件设计
Fazhen Song, Yu Wang, Haiqing Cao
自动化学院,北京工业大学,中国
e-mail: 446536530@qq.com, wangyu@bit.edu.cn, cxy8888@bit.edu.cn
摘要:无刷直流电动机近年来得到了越来越广泛的应用。本文设计了一种基于TMS320F2808 DSP的无刷直流电机驱动器控制系统,实现了电流、速度和位置的闭环控制。用户可以通过PC机对不同负载设置不同的工作模式和参数。文章详细讨论了初始化、AD采样、霍尔换相、RS232通信模块等主要模块,此外,我们采用了抗积分饱和的PID控制算法,而不是传统的PID控制算法。实验结果表明,该系统具有良好的动态性能和静态性能。
关键词:无刷直流;DSP;抗积分饱和PID
1 引言
众所周知,直流电机具有良好的转矩特性,易于控制,但由于机械换相的存在,换相火花会引起电磁干扰和噪声。这些问题降低了直流电机系统的可靠性,增加了维护成本。因此,采用电子换相的永磁无刷直流电机克服了机械换相带来的缺点,无刷直流电机以其结构简单、体积小、运行可靠、维护方便等优点引起了人们的广泛关注[1]。随着电力电子技术与微电子技术的发展,无刷直流电机控制系统已越来越多地应用于伺服控制、数控机床、机器人等领域。随着高性能DSP的出现,使得一系列复杂的高精度电机控制算法得以实现,TI公司的TMS320F2808便是一款专业的高性能电机控制DSP。
该无刷直流电机驱动控制系统由位置、速度和电流三个闭环组成。驱动系统可分别对三个回路进行控制,并且系统可以通过RS232与PC机通讯,允许用户根据负载和工作环境调整系统的工作方式,设置PID控制参数。软件包括换相模块、初始化模块、主控模块和RS232通信模块。在无刷直流电机的启动问题中,本文提出了一种捕获模式的电动机起动方法,使程序简单且实用。对于传统的三回路控制,采用传统的PID控制方法,发现积分饱和现象会影响控制系统的动态性能,因此我们采用了抗积分饱和的措施,提高了PID控制算法的性能[2]、[3]。
2 系统硬件
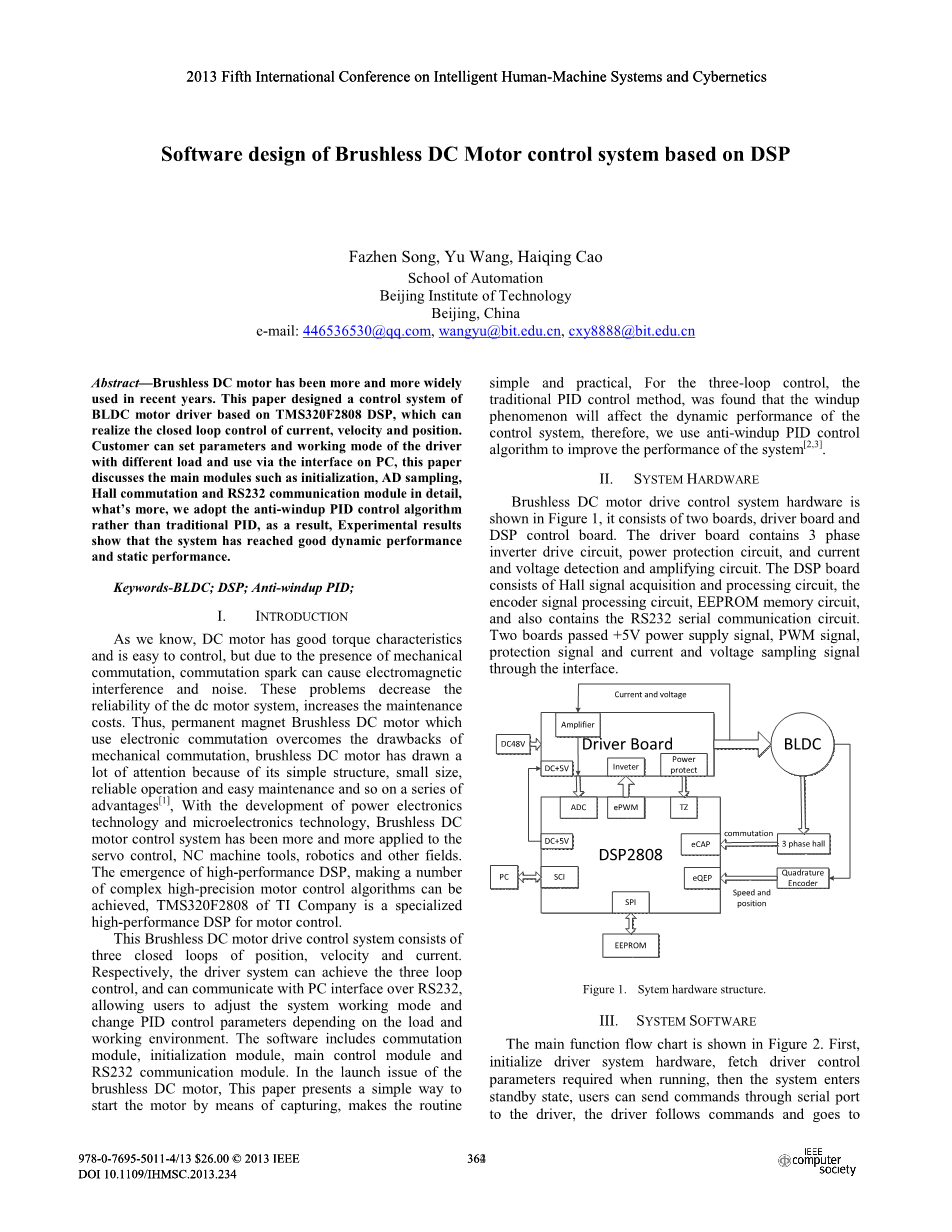
无刷直流电机驱动控制系统硬件如图1所示,由驱动板和DSP控制板两部分组成。驱动板包括三相逆变器驱动电路、功率保护电路、电流电压检测放大电路。DSP板由霍尔信号采集处理电路、编码器信号处理电路、EEPROM存储器电路和RS232串行通信电路组成。两块板通过接口互相传递 5V电源信号、PWM信号、保护信号和电流电压采样信号。
图1 系统硬件结构
3系统软件
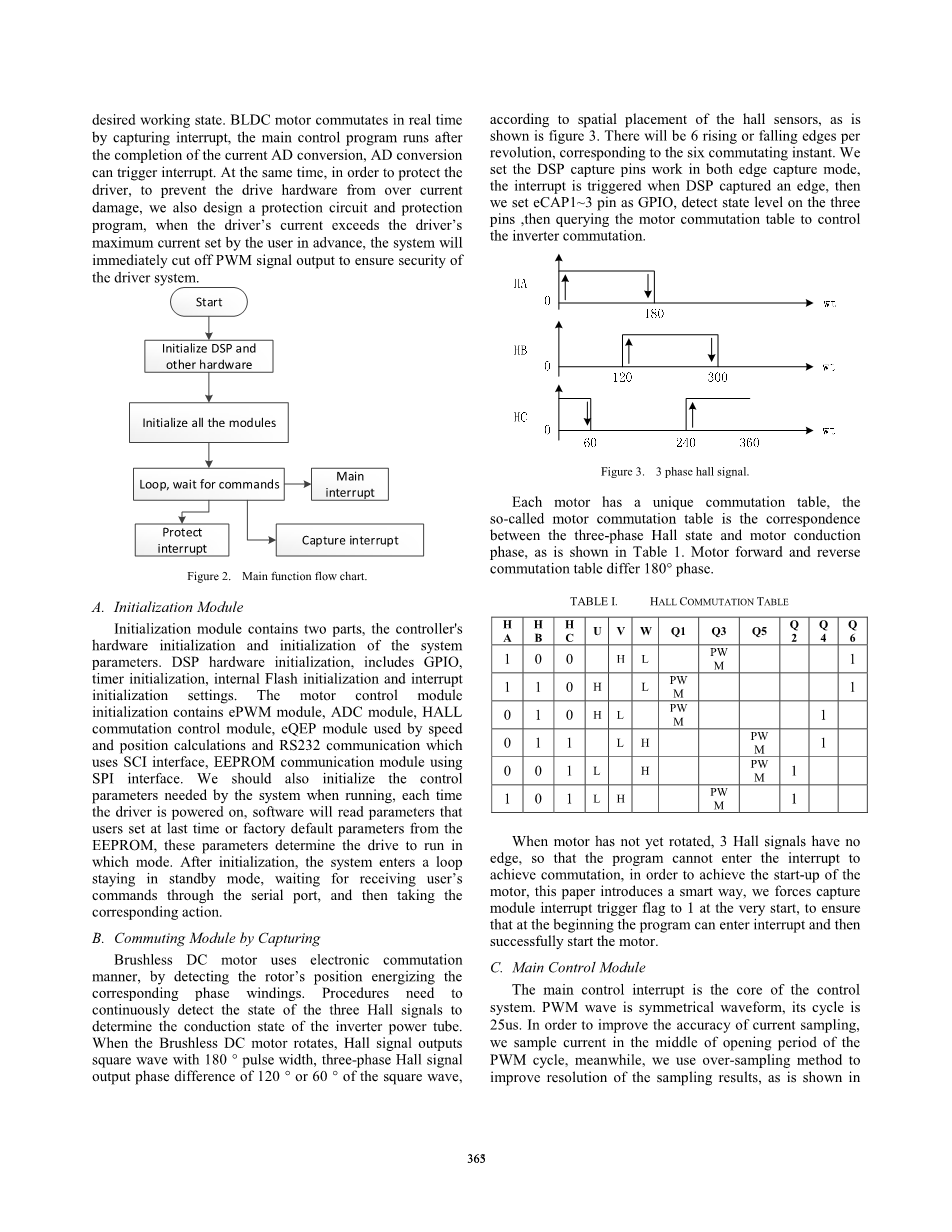
主要功能流程图如图2所示。首先,初始化系统硬件的驱动,获取运行时所需要的驱动控制参数,然后系统进入待机状态,用户可以通过串口向驱动器发送命令,驱动器执行命令后进入设定的工作状态。主控程序运行完成后进行电流AD转换,AD转换可触发中断,无刷直流电机通过捕获中断来实时换相。同时,为了保护驱动器,防止驱动器硬件因电流过大损坏,我们还设计了保护电路和保护程序,当驱动器电流超过用户预先设定的驱动器最大电流时,系统会立即切断PWM信号输出,保证驱动器系统的安全。
图2 主功能流程图
3.1 初始化模块
初始化模块包括控制器硬件初始化和系统参数初始化两部分。DSP硬件初始化,包括GPIO、定时器初始化、内部闪存初始化和中断初始化设置。电机控制模块初始化包括ePWM模块、ADC模块、霍尔换相控制模块、用于速度和位置计算的eQEP模块、使用SCI接口的RS232通信模块和使用SPI接口的EEPROM通信模块。我们还要在运行时初始化系统的控制参数,每次驱动上电时,软件都会从EEPROM中读取用户上次设置的参数或出厂默认参数,这些参数决定了运行模式。初始化后,系统进入一个保持待机状态的循环,等待接收用户通过串口发出的命令,然后采取相应的动作。
3.2 捕获换相模块
无刷直流电机采用电子换相方式,通过检测转子的位置来激励相应的相绕组。程序需要连续检测三个霍尔信号以确定逆变功率管的导通状态。无刷直流电机旋转时,霍尔信号根据霍尔传感器的空间位置,输出脉冲宽度为180°的方波,三相霍尔信号输出相位差为120°或60°方波,如图3所示。每转有6个上升或下降边沿,对应于6个换相瞬间。我们将DSP管脚捕获工作模式设置为双边捕获,当DSP捕获到一个边沿时,触发中断,然后将eCAP1~3管脚设置为gpio,检测三个管脚上的电平状态,然后查询电机换相表控制逆变器换相。
图3 三相霍尔信号
每台电机都有一个独特的换相表,所谓的电机换相表是三相霍尔状态与电机导通相位之间的对应关系,如表1所示。电机正反向换相表的相位相差180°。
表1 相霍换相表
当电机还没有旋转时,3个霍尔信号没有边沿变化,使程序不能进入中断来实现换相。为了实现电机的启动,本文介绍了一种好方法。我们强制捕获模块的中断触发标志在一开始就为1,以确保程序能进入中断,然后就能成功启动电机。
3.3 主控制模块
主控制中断是控制系统的核心。PWM波为对称波形,周期为25us。为了提高电流采样的精度,我们在PWM周期开通期间对电流进行采样,同时采用过采样的方法来提高采样结果的分辨率,如图4所示,以开关管Q1和Q4为例,当Q1、Q4接通时,电流开始缓慢上升,系统是不稳定的,因此,不应在该时间内进行采样,采样时间应选择在PWM周期的传输过程中。
图4 电流采样时间
ePWM模块的计时器设置为连续上升下降模式,我们可以使用循环匹配事件启动ADC转换[4]。考虑到程序的简单性和可行性,逆变桥使用H-PWM-L-ON PWM调制[5]。
大多数论文是在定时器中断时控制电流、速度或位置,这种方法的缺点是电流采样与实时控制不同步,为了克服这一缺点,保持电流采样与实时控制的同步,本文提出了一种新的方法,我们在电流采样中断中完成了实时控制任务,保证每次控制程序总能得到最新的电流反馈值。
图5显示了系统的主控制中断流程图。
图5 主控制程序
经典的PID控制算法适用于单输入单输出系统,对复杂的非线性系统可能需要进行补偿。传统的PID算法存在着积分饱和现象,当系统中存在一个方向误差时,由于积分效应,控制器输出将不断增加,这可能导致控制器输出达到执行机构的阈值。如果误差方向发生变化,控制器输出逐渐减小,控制器输出将退出饱和区,执行机构将在阈值范围内工作;如果误差方向没有改变,控制输出继续增加,但执行机构仍保持在阈值范围内工作。在这种情况下,控制器输出进入饱和区,饱和区越深,退出饱和区所需时间越长。在饱和区内执行机构在阈值范围内工作,如果错误的信号突然反转,执行机构不会立即响应,控制器输出逐渐减小,当退出饱和区,执行机构才发生反应。这将为系统的动态响应和整体性能带来恶化。
本文采用在超过限额时削弱积分的方法,实现了抗积分饱和PID算法。
图6 抗积分饱和PID算法
图6显示了流程图。在计算u(k)时,我们首先确定最后一次控制器输出u(k-1)是否超过限额。如果u(k-1)gt;umax,我们只累积负误差;如果u(k-1)lt;umin,我们只累积正误差。这样可以避免控制器输出长期处于饱和区,进而提高控制系统的动态响应。
3.4 RS232通信模块
F2808的SCI模块在发送和接收数据时使用一个16字节的FIFO寄存器,保证了小于16字节的数据通信不会占用CPU时间,提高了串行通信的效率。串行通信模块用来实现驱动器与PC机之间的控制参数和控制命令的传输任务,其通信协议是基于Modbus协议,以保证通信过程的可靠性。串行通信程序流程图如图7所示,驱动器在中断里接收数据,当串行端口接收到完整的数据帧时,它将解析该帧,首先分析该数据帧,然后根据不同的功能码将数据传输到PC或者直接执行相应的命令。
图7 RS232通信流程图
4 实验结果
本文介绍了无刷直流电机驱动器控制程序的各个模块,并在实际硬件平台上成功运行。让驱动程序跟踪正弦波,我们可以在PC接口上看到它的性能,结果如图8所示。实验结果表明,该驱动器能在空载情况下跟踪方波、三角波和正弦波,具有良好的性能,同时证明了抗积分饱和PID算法优于传统PID算法。当驱动器运行在一定负载下时,我们可以通过观察PC接口上的响应曲线,来调整在该负载下的PID参数直到我们满意为止,这样驱动器就可以胜任多种环境。
图8 跟踪正弦波响应曲线
参考文献
- Zhang Chen The principle and application of Brushless DC motor 2nd ed Beijing: China Machine Press 2004
- Fang Hongwei Xia Changliang Analysis of Windup in Brushless DC Motor Speed Regulation System and its Control http://www.paper.edu.cn/releasepaper/ content/200707-204
- Da Zhang Hui Li Emmanuel G. Collins Digital Anti-Windup PI Controllers for Variable-Speed Motor Drives Using FPGA and Stochastic Theory IEEE Trans. On Power Electronics 2006 21(5): 1496-1501.
- TMS320x280x 2801x 2804x Enhanced Pulse Width Modulator (ePWM) Module Texas Instruments October 2007.
- Zhang Xiangjun Chen Boshi The different influences of four PWM modes on commutation torque ripples in brushless DC motor control system. ELECTRIC MACHINES AND CONTROL. Vol. 7 No. 2 June 2003.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20780],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

