
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
使用LCL滤波器的并网电压源逆变器的改进的控制策略
郭国桥,徐德宏,IEEE会员,廖平,朱宣彩
摘要:本文提出了一种基于LCL滤波器的并网电压源逆变器新电流反馈的新型电流控制策略。通过将LCL滤波器的电容器分为两个部分,每个部分具有电容的比例分配,测量在这两个部分之间流动的电流,并将其用作电流调节器的反馈以稳定并提高系统性能。因此,具有LCL滤波器的并网逆变器系统的V-I传递函数从三阶函数降级到一阶函数,因此闭环电流反馈控制系统可以容易地最小化稳态误差和电流谐波失真以及系统稳定性。建议控制器的逆变器系统的特性进行了研究,并与使用传统控制策略的特性进行了比较。提供实验结果,并且在5kW燃料电池逆变器上验证了新的电流控制策略。
指数术语 - 电流控制,谐波失真,互连,逆变器,LCL滤波器。
I.引言
传统上,L滤波器用作电网网络和并网电压源逆变器(VSI)之间的接口。使用L滤波器,必须使用高开关频率以获得高动态性能和由脉宽调制(PWM)方法引起的足够的谐波衰减。相比之下,低通滤波器的替代LCL形式提供了在较低开关频率下改善谐波性能的潜力,这在较高功率应用中是显着的优点[1]。然而,结合LCL滤波器的系统是第三级的,并且它们需要更复杂的电流控制策略以维持系统稳定性,并且由于共振危害更容易受到由电网电压失真引起的干扰的影响,降低到电网的谐波阻抗。当参考电流是非正弦信号时,血氧或预测控制器通常被认为是可行的解决方案[2]。虽然滞环控制器是简单和鲁棒的,但它在可变开关频率,电流误差两倍的滞后带和高频极限循环操作中具有主要缺点[3]。另一方面,预测控制器的性能取决于工厂模型的精度以及参考电流预测的精度[4]。
电流反馈电网电压前馈的比例积分(PI)控制通常用于电流控制逆变器的静态参考系。但这些解决方案有两个主要缺点:PI控制器无法跟踪一个正常参考,没有稳态误差和差的干扰抑制能力。这是由于在LCL滤波器谐振频率下系统稳定性所需的确定的控制环路增益。电网电压前馈通常用于获得良好的动态响应,但这又导致电流波形中的电网电压背景谐波的增加,因为不完善的补偿[5],[6]。
用于电流控制的旋转同步坐标系PI控制器广泛应用于三相逆变器,以获得零稳态误差[7] [8]。该限制包括由于对谐波电流衰减的多个参考帧的需要而产生的显着计算,以及其不能直接用于单相逆变器中。
近年来,比例谐振(PR)控制器在并网系统的电流调节方面获得了大量的利益[9] - [12]。它在选定的谐振频率下引入无限增益,用于消除该频率处的稳态误差。然而,由于当补偿频率超出系统带宽时系统不稳定,PR控制器的谐波补偿器限于几个低阶电流谐波。被动阻尼法通常用于保持系统的稳定性,但受成本,电感值,损耗和滤波器性能劣化的限制[13] [14]。
本文提出了一种新的控制策略的并网VSI与LCL滤波器,这里称为LCCL。 LCCL策略将LCL滤波器的电容分成两部分,测量这两部分之间流动的电流,并将其用作电流控制器的反馈。以这种方式,在没有任何阻尼电阻器的情况下,逆变器控制系统从三阶降级到一阶,作为具有L滤波器的一阶系统。因此,控制环路增益和带宽可以增加,并且可以实现许多现有的电流控制方法以使稳态误差和电流谐波失真最小化。建议的LCCL控制器的逆变器系统的特点进行了调查和比较与传统的策略。新的电流控制策略已在5 kW DSP控制的燃料电池逆变器上进行了实验验证。
II.系统结构和特性
图1示出了用于燃料电池生成的5kW并网VSI逆变器的系统拓扑。拓扑结构包括质子交换膜燃料电池(PEMFC)系统,具有三级调节直流输出的dc-dc转换器,其将燃料电池输出连接到逆变器直流侧,半桥单相PWM逆变器,通过静态转换开关将逆变器输出连接到电网的低通LCL滤波器,以及用于调节逆变器的电流控制器。
图1 并网燃料电池逆变器的系统拓扑
LCL滤波器主要用于实现降低的开关纹波,与L滤波器相比,滤波器硬件只有小的增加。它有以下组件:
这里,是逆变器侧电感,是滤波器的电网侧电感,是电网的线路电感,以及是它们的等效串联电阻器(ESR)。是LCL滤波器的电容。
为了电流控制的目的,给出三个传递函数:
其中是逆变器输出电流,是电网侧电流,是逆变器输出电压。为了与L滤波器(具有电感)进行比较,我们假设,和忽略电感器的ESR。从(1)--(6),从逆变器输出电压到逆变器电流的转移函数和电网电流,即,和可以表示为
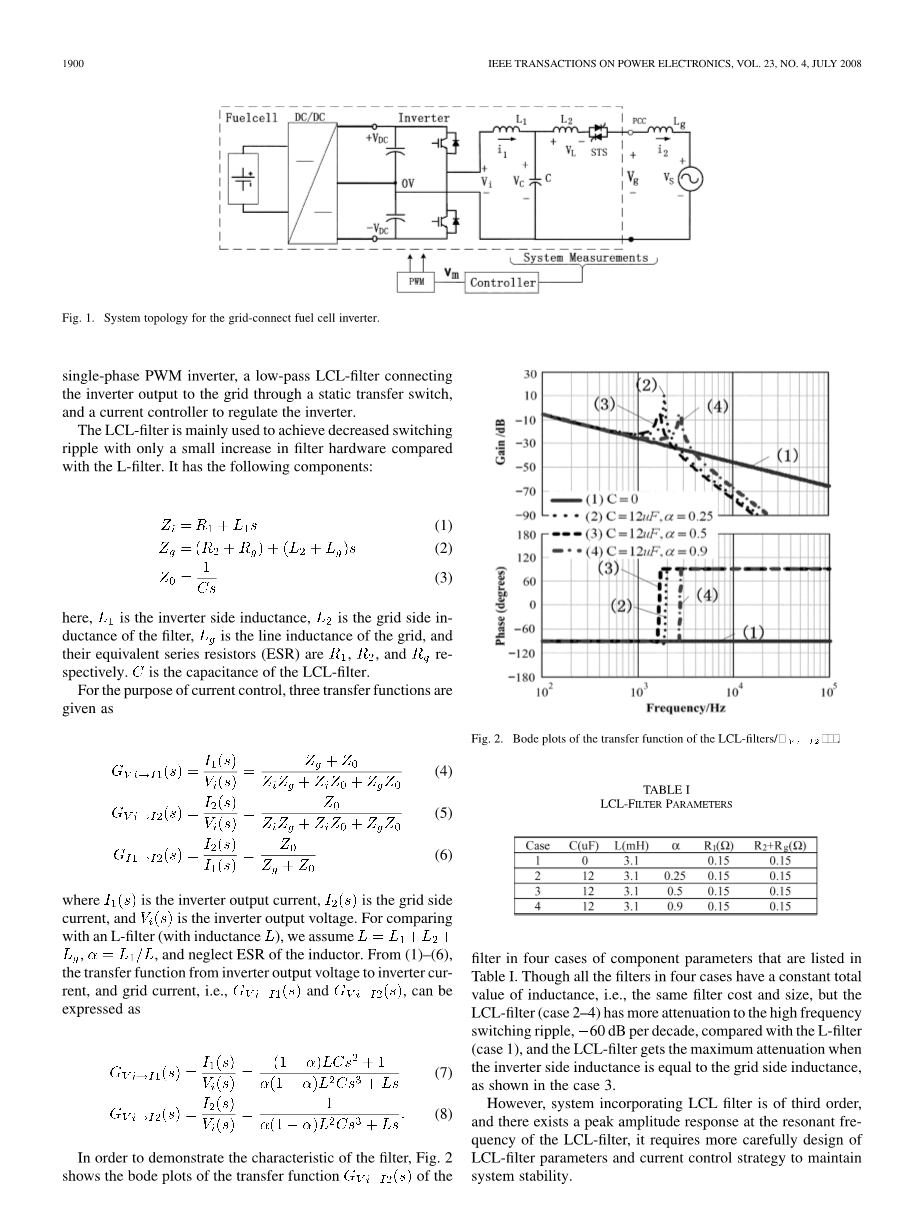
为了证明滤波器的特性,图2示出了传递函数的波特图:
图2 LCL滤波器的传递函数的波特图
表I LCL过滤器参数
在四种情况下所有滤波器具有恒定的电感总值,即相同的滤波器成本和尺寸,但LCL滤波器(情况2-4)具有 与L滤波器(情况1)相比,对高频开关纹波的衰减更大(每十倍60 dB),当逆变器侧电感等于电网侧电感时,LCL滤波器获得最大衰减,如情况3。
然而,结合LCL滤波器的系统是三阶的,并且在LCL滤波器的谐振频率处存在峰值幅度响应,其需要更仔细地设计LCL滤波器参数和电流控制策略以维持系统稳定性。
最流行的方法是在LCL滤波器的电容并联分支中插入一个阻尼电阻[13]。然后,(3)应修改为
图3示出了传递函数的波特图
图3 滤波器的传递函数的波特图
和具有被动阻尼的滤波器,而并且没有被动阻尼。阻尼电阻为10Ω,其他滤波器参数设置为表1的情况3。注意,传递函数中的高频振幅衰减仅在引入无源阻尼时为每十年20 dB。
如图3所示,阻尼滤波器对谐振频率具有更大的衰减,但是在高频区域中具有较小的衰减,比非阻尼滤波器的衰减小十倍。这将使阻尼滤波器成为与具有较低开关频率的大功率变换器的EMI标准匹配的严重问题。 IEEE Std.519-1992建议高于35的谐波应限制在小于0.3%。因此,如果逆变器侧电感的开关纹波设计为10%。在开关频率下的传递函数中需要大于30dB的附加衰减。因此,对于阻尼滤波器,逆变器开关频率必须约为电网侧谐振频率的30倍,而对于非阻尼滤波器,其可以不超过6倍。 因此,对于并网逆变器的给定开关频率,采用无源衰减方法,滤波器尺寸和成本将会提高,系统带宽将会降低。
BI. 原则和控制策略分析
A.传统控制策略
通常,逆变器电流或电网电流被用作电流控制器的反馈,以调节注入到电网中的电流。 两个典型的常规电流控制器的框图如图1所示。图4.其中,是输入电流参考,是由特殊控制策略确定的电流调节器,是包括PWM开关延迟的输入增益(等于)的组合,是电网电压,定义为噪声电压,例如PWM逆变器的死区时间效应。 逆变器电流或电网电流通过反馈比例增益被引入电流控制器。 是LCL滤波器的传递函数,由(4)给出用于逆变器电流反馈,在图4中。 图4(a)或(5)用于电网电流反馈。
然后,图5的系统的控制环路增益。 4可以推导为
稳态误差可以描述为
PWM逆变器的增益可以近似表示为
其中是PWM控制延迟的时间。
图5示出了在没有电流调节器的常规电流反馈控制策略下的开环传递函数的波德图,其中滤波器的参数给出为表I的情况3,0.023,=400V,并且假设为100。
图5.在没有电流调节器的常规控制下的开环传递函数的波特图
如果使用例如PI电流调节器,则可以定义为
为了系统稳定性的目的,由于在开环传递函数中非阻尼LCL滤波器的共振频率处存在的峰值幅度,比例增益受到限制,如图3所示。因此,传统策略的控制环路增益非常小,并且系统输出不能跟踪没有稳态误差的正弦参考。
B.拟议控制策略
所提出的新的控制结构如图6所示。通过将LCL滤波器的电容器分为两部分,即和,和之间的电流(用于表示)被用作电流反馈以控制逆变器。
图6电流控制的框图:在LCCL控制下
假设和,然后反馈电流可以表示为
或
这里,是滤波电容器的总电流。从(13)和(14),应该注意的是,新的控制策略采用电网电流和部分电容器电流的和作为电流反馈,而不包含电容器电流或包含全电容器电流。换句话说,逆变器电流和电网电流的加权平均值用作所提出的新控制策略中的反馈。通过分离LCL滤波器的电容器,仅需要一个电流传感器来获得逆变器电流和电网电流的加权平均值。现在,LCL滤波器是L-C-C-L的形式,因此这种控制策略简称为LCCL方法。
可以导出三阶传递函数从到电流,并表示为(15)。此函数中有三个极点和两个零点
当选择的值满足预先设定的条件时
等式(16)可以表示为
在(15)中替换(16)之后,从三阶降级到一阶
注意,两个零在函数中抵消两个极点,并且(18)类似于L滤波器的传递函数。然而,注入到电网中的开关纹波电流仍然被三阶LCL滤波器衰减。
总之,所提出的LCCL控制策略将LCL滤波器中的电容分为两部分,其比例预先表示为(17),然后测量并获取电容器的两个部分之间的电流作为反馈电流控制。
对于电网电流控制的稳态精度,应通过增加LCL滤波器中第二电容的电网频率电流来修改电流控制的参考。
等式(9)和(10)在提出的LCCL控制策略下有效,但是传递函数,由(18)给出。因此,在控制中消除了在LCL滤波器的谐振频率处存在的峰值振幅、环路增益。此外,可以应用PI电流调节器在LCCL控制策略中,但这个时候的值可以增加到更大的值以提高系统性能。考虑LCL滤波器中电感的ESR,如果它们与对应的电感成比例,例如
那么两个零完全抵消两个极点,(17)应该修改为
如果电感不匹配的ESR(19),零点不能完全抵消极点,但是对于合理的ESR值将存在抵消效应。图。图7示出了在表II中列出的三种ESR值的情况下在LCCL控制策略下的开环传递函数的波特图。滤波器的参数给出为表I的情况3,H=0.023,=400V,=100mu;s,并且不包括电流调节器。
图7示出了在电感器的ESR值不匹配的情况下LCCL控制仍然有效。
图7.没有电流调节器的LCCL控制下的开环传递函数的波特图(不同的ESR值列在表II中)。
表II LCL滤波器具有不同的电感器
C.电流控制器的设计
LCCL控制策略的优点可以通过比较系统的电流控制器设计来证明。
例如,如果为电流控制器选择PI调节器,则不同控制策略下的环路传递函数的波特图如图8所示。PI参数列于表III。所有控制策略具有大于30的相位裕度,但是PI调节器的比例增益是非常不同的,以维持系统稳定性。还计算了环路增益,基频的误差衰减和带宽,并列在表III中。图9示出了对于相应的控制策略通过(10)获得的低阶谐波衰减。显然,具有新的控制策略的环路增益和交叉频率比那些具有常规控制策略的环路增益和交叉频率高得多,从而在闭环控制中产生较小的稳态误差和更好的动态响应。
图8.不同电流反馈控制的环路传递函数的波特图。
表IIIPI参数和结果用于不同的控制策略
如果要引入具有谐波补偿(HC)的比例谐振(PR)控制器,则应首先基于比例或PI系统来维持系统稳定性[11][12][15]。只有LCCL控制策略可以为PR的谐波补偿提供足够的带宽,以衰减电流频谱中的主要低阶谐波,如图8所示。否则,必须引入一个被动阻尼,以消耗带LCL滤波器的比例系统的带宽,这反过来会降低开关频率谐波衰减。
IV.实验结果
建立一个5 kW的DSP控制原型,以验证并网燃料电池逆
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141228],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

