
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(翻译)
题 目 基于STM32的四旋翼飞行器姿态算法的系统设计
原 题 ATTITUDE ALGORITHM SYSTEM DESIGN OF QUADROTOR AIRCRAT BASED ON STM32
二O一七 年 五 月 十 日
基于STM32的四旋翼飞行器姿态算法的系统设计
摘要:本文主要讨论了基于STM32的四旋翼飞行器的姿态算法研究。本系统采用了低成本的航姿参考系统测量飞机姿态,用互补滤波算法和PI控制来融合数据,通过坐标转换将陀螺仪、加速度计和地磁传感器的数据处理,计算出四旋翼飞行器的姿态。实验证明,姿态算法系统解决了噪声干扰和姿态最优估计,并且得到了长时间的稳定、准确、可靠的数据输出。
关键词:四旋翼飞机;姿态算法;四元数;互补滤波;PI控制
1 介绍
姿态测量是飞行器自主飞行的先决条件,同时,飞机姿态角的实时获得决定了飞机控制精度和稳定性。现在随着微电子技术发展,飞机姿态测量一般都是以低成本AHRS参考系为基础,主要包括以MEMS技术为基础的加速度计、磁力计和三轴陀螺仪。可以通过计算获得姿态角度作为传感器输出数据。
系统的机械结构和非正交三轴传感器本身造成非正交误差,数据整合产生分散误差,外部干扰产生错误。因此,系统在传感器误差补偿时时必须使用多传感器数据融合计算姿态。
2 姿态角描述
在坐标系中,它使用三种数学方法来描述飞机姿态:欧拉角、方向余弦和四元数。它们三者之间可以互相转化。欧拉角代表身体的三个旋转角度。偏航角()被定义为相对于磁北极的角度。翻滚角()被定义为X轴和水平面之间的角度。俯仰角()定义为Y轴和水平面之间的角度。西北箭头指着的方向被称为正偏航角。右翼下沉被认为是旋转了正的翻滚角,鼻向下取向被认为是正的俯仰角。坐标系如图1所示。
图1 坐标系
在飞行过程中,地理坐标系不断在三个不同的轴中移动,以转换飞机坐标系。顺序是U-E-N。这意味着第一个旋转是偏航角,第二个旋转是俯仰角,最后是翻滚角。每个旋转可以在数学上表示为独立的方向余弦矩阵。坐标系的变换可以用这三个独立的变换矩阵来表示。变换矩阵为。
(1)
如果90°,欧拉角可以表示如下:
(2)
(3)
(4)
(5)
在方程(5)中,四元数态是一个四参数表达式。,,和是实数,,和
是彼此之间互相正交的单位向量。坐标系转换为另一个坐标系可用于定义矢量旋转。
方程(6)是一种方向余弦矩阵,用于表示从地理坐标系到身体坐标系的变换。
(6)
3 飞行姿态算法系统构建
3.1 系统硬件
在本文中,姿态计算系统的硬件由两部分组成。一部分是使用ST公司的STM32F405系列芯片作为主要控制器,它使用了Cortex-M4 内核,是32位ARM处理器。另一部分是AHRS参考系统,其包括两个精密姿势采集传感器MPU6050芯片和HMC598C。MPU-6500是运动跟踪装置,结合了3轴陀螺仪和3轴加速度计。硬件系统如图2所示
图2 硬件系统
3.2角度测量和数据校准
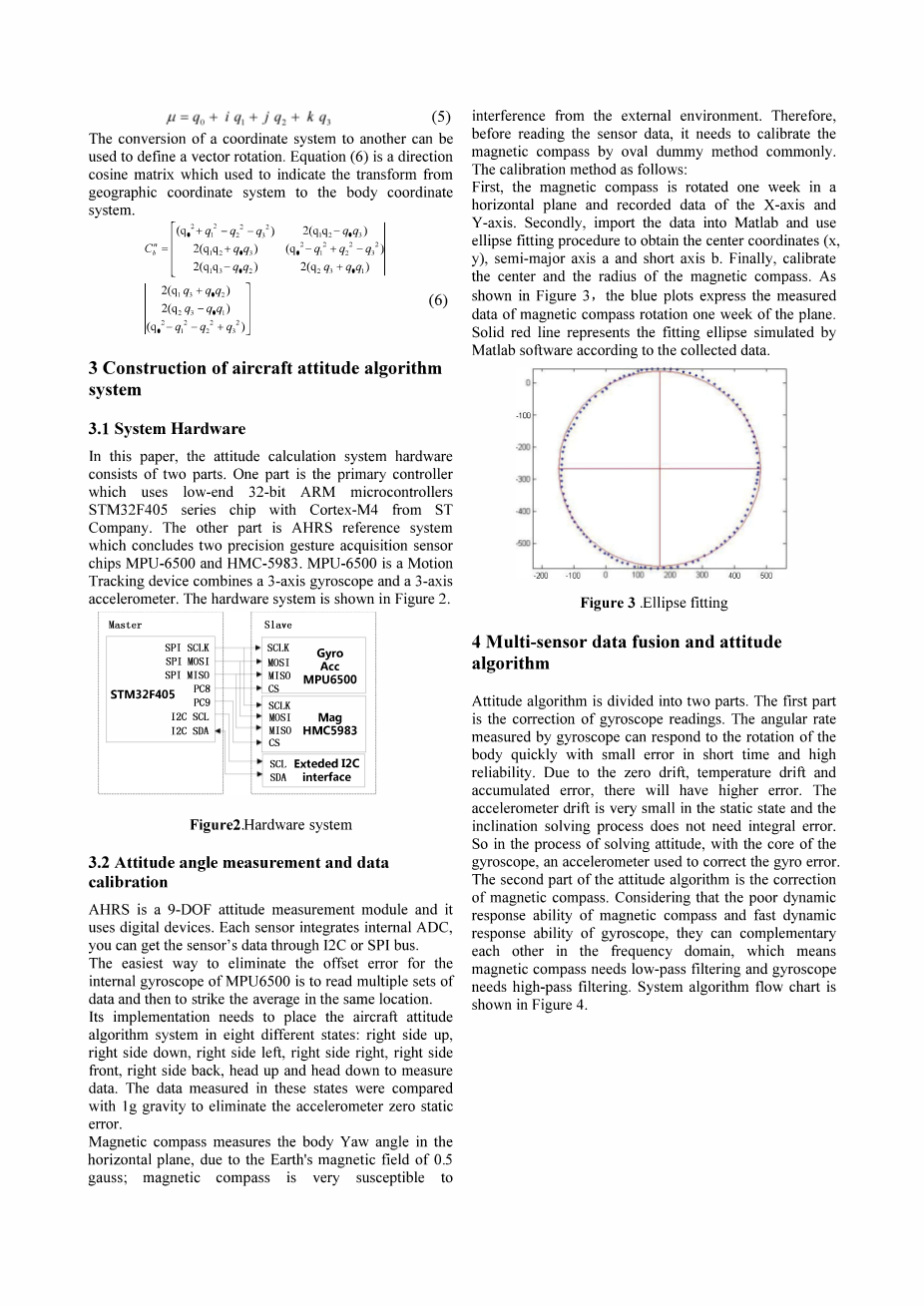
AHRS是一个9自由度姿态测量模块,它使用数字设备。每个传感器集成内部ADC,你可以通过I2C或SPI总线获取传感器的数据。消除MPU6500的内部陀螺仪偏移误差的最简单的方法是在同一地点读多组数据然后取平均值。其实施需要在八个不同的状态研究飞机姿态算法,右侧向上,右侧向下,右侧右左,右侧向右,右侧向前,右侧向后,朝上,向下。在这些状态下测量的数据,与Ig重力相比,消除加速度计零状态误差。由于地球的磁场为0.5高斯,磁罗盘测量机身在水平面上的偏航角,磁力计非常容易受到外部环境的干扰。因此,在读取传感器数据之前,它通常需要通过椭圆虚拟法校准磁力计。校准方法如下:首先,磁力计在水平面旋转一周,记录X轴和Y轴的数据。其次,将数据导入Matlab并使用椭圆拟合程序获得中心坐标(x,y),半长轴a和短轴b。最后,校准磁罗盘的中心和半径。如图3所示,蓝色的地块表达磁罗盘旋转一周的测量数据。实线红线代表根据收集的数据,通过Matlab软件模拟拟合的椭圆。
图3 椭圆拟合
4多传感器数据融合与姿态算法
姿态算法分为两部分。第一部分是陀螺仪读数的校正。通过陀螺仪测量的角速度可以在短时间和高可靠性下以较小的误差快速响应机身的旋转。由于零漂移,温度漂移和累积误差,将会有更高的错误。在静态下加速度计漂移非常小,倾斜求解过程不需要积分误差。所以在姿态结算的过程中,使用陀螺仪的核心加速度计,用于校正陀螺仪的错误。姿态算法的第二部分是磁罗盘的校正。考虑到磁罗盘的动态响应能力差,陀螺仪的动态响应能力较强,它们可以在频域互补,这意味着磁罗盘需要低通滤波,陀螺仪需要高通滤波。系统算法流程图如图4所示。
图4 姿态计算流程图
在身体坐标系中得到的重力矢量。是通过坐标变换在地理坐标中从重力向量变换而来的身体坐标中的重力向量。作为身体坐标的重力矢量参考,它们之间的误差是由矢量交叉乘积表示的坐标轴误差的旋转。由于陀螺仪的直接积分,陀螺仪误差可能会在静态情况下反映身体坐标误差而陀螺仪的积分误差可以通过加速度计校正来校正。如果陀螺仪根据交叉积的轴旋转交叉积误差的角度,它可以消除在人体坐标系测量出的重力矢量和转换重力矢量之间的误差。如式(7)所示。
(7)
在动态情况下,陀螺仪响应速度快,与加速度计相比较不易受干扰;你可以使用补充过滤器,部分信任加速度计校准,并将三轴乘积乘以X%加到陀螺仪积分角度。在PI控制之后,我们可以得到陀螺仪测量的校正矢量并补偿零漂。
通过补充滤波器,磁罗盘的测量值将被校正。
(8)
(9)
(10)
图5 互补滤波器
这允许将图5解析为等式(11)。磁罗盘和陀螺仪是互补滤波。
(11)
在等式(11)中,r值越大,互补滤波数据融合中陀螺仪的比重越大。
5姿态算法的结果
在实验中,我们使用低端32位ARM微控制器STM32F405系列芯片和AHRS参考系统,该系统包括了两个精密姿势采集传感器MPU-6500芯片和HMC5983。我们将AHRS放置在水平转台上,通过串口读取传感器收集的和姿态算法后的数据。通过分析数据,我们可以得到俯仰角和偏角。
图6 俯仰角
图7 偏航角
从图6可以看出,红线代表陀螺仪通过积分获得的俯仰角。随着时间的增加,俯仰角的零漂移误差越来越大。蓝线表示通过坐标转换的俯仰角的重力矢量,零误差相对稳定,保持在约2.2度。加速度计和陀螺仪校准后,绿线表示正确的俯仰角。同时零误差已明显改善至1度左右。磁罗经测试在门内进行,有很大的干扰。测试结果如图7所示,等式(11)中的r等于0.1。蓝线表示由磁罗盘测量的偏角。它具有相对较大的零误差,并且非常容易受到外部干扰。红线表示由陀螺仪积分的偏角。我们可以发现积分偏差的最大偏差达到10度。集成的偏航角度与俯仰角度相同。随着时间的增加,俯仰角的零漂移误差变得越来越大。互补滤波器后,由绿线表示的修正的偏航角度消除了一些干扰信号,并具有陀螺仪的快速响应特性。误差可以保持在2度以内。
6 结论
飞机系统稳定运行的根本保证是对姿态的最佳估计。本文提出了基于STM32的四转子姿态算法设计方案。 在四阶算法和静态的基础上,该方案通过坐标变换将加速度矢量的地理坐标系传递给身体坐标系转换。 它扭曲坐标系旋转误差,避免陀螺仪零误差累积,并用磁罗经修正陀螺仪读数互补,消除高频干扰。 实验表明,PI控制下陀螺仪的俯仰角误差在9度下降至2度; 磁罗盘消除了一些高频干扰; 偏航角误差保持在正或负2度左右。 姿态算法系统解决了噪声干扰和姿态问题的最优估计。 实现了长时间精确可靠的数据输出要求,满足了四转子飞行器的要求。
致谢
这项工作得到广西自动检测技术与仪器重点实验室(YQI4203)的支持。 感谢项目“桂林航天航空航天大学研究自然科学基金(YJ1303)”支持的基于多传感器微系统的结合AHRS的构造和误差补偿。
参考文献
[1] Xu R. Ozguner U. Sliding mode contol of aquadrotor helicopter[C]. 45th IEEE Conference on Decision and Control. 2006. 2006: 4957-4962.
[2] Huang H, Hofnann G M,Waslander S L, et al.Aerodynamics and control of autonomous quadrotor helicopters in aggressive maneuvering[C]. ICRA09 IEEE Interational Conference on Robotics and Automation, 2009. 2009: 3277-3282.
[3] Lu Xiehe, Li Jianbo. Four rotor attitude control system based on STM32[J].Computer Measurement amp;Contol,2014.22(3)
[4] Yang Zhi-ju, Yuang Gang, Xu Xin-lin. Aircraf postures algorithm and their simulation study[J]. Joural of Liaoning University of Technology (Natural Science Edition) 2010(10)
[5] Zhang R, Quan Q, Cai K Y. Attitude control of a quadrotor aircraf subject to a class of time-varying disturbances[J].IET Control Theory Applications,2011, 5(9): 1140-1146.
[6] Ivan Gonzalez, Sergio Salazar Rogelio Lozano, Juan Escareno. Real Time Altitude Robust controller for a Quad-rotor aircraf[J]. ICUAS, 2013, 1(1): 630-635
[7] Zuo Z. Trajectory tracking control design with command-fltered compensation for a quadrotor[J]. lET Control Theory Applications, 20I0, 4(11): 2343-2355.
[8] David Lara, Gerardo Romero, Anand Sanchez, Rogelio Lozano, Alfedo Guerrero.Robustness margin for attitude control of a four rotor mini-rotorcraf: Case of study[J].Mechatronics, 2010,20(1): 143-152.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26946],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

