英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
使用新的滑动模式和模糊逻辑适应机制且基于MARS无传感矢量控制的感应电机
Shady M. Gadoue,会员,IEEE, Damian Giaouris,会员,IEEE,和John W. Finch,高级会员,IEEE
摘要
在本文中,提出了两个新的适应方案以替代基于转子通量的模型参考自适应速度估计方案中使用的经典PI控制器。第一个提出的适应方案是基于滑模理论。该方案使用Lyapunov理论导出新的速度估计适应定律,以确保估计的稳定性,它也使用到了快速的误差动力学。另一个适应机制是基于模糊逻辑策略。当矢量控制驱动器以非常低的速度工作时,在开环和闭环无传感器操作模式中执行新方案和常规方案之间的实验比较。在两种操作模式中使用新的滑动模式和模糊逻辑自适应机制已经获得了优异的性能。
关键词 模糊控制,感应电机,模型参考自适应控制,滑模控制
命名
IsD, isQ 定子架中的定子电流分量。
J 转子惯量。
Lm 互感。
Ls,Lr 定子和转子自感。
P 差分运算符。
Rs,Rr 定子和转子电阻。
Tr 转子时间常数。
vsD,vsQ 定子架中的定子电压分量。
εomega; 速度调谐信号。
sigma; 泄漏系数。
psi;rd,psi;rq 转子磁链矢量的分量。
Omega;r 角转子速度。
一简介
在无传感器感应电动机驱动器的转子速度估计中提出了SEVERAL策略[1]。 在这些技术中,模型参考自适应系统(MRAS)方案是最常用的策略,由于它们相对简单和低计算量[1],[2]。转子磁通,反电动势(EMF)和无功功率技术是受欢迎的MRAS策略,受到了广泛的关注。反EMF方案可能在低定子频率处具有稳定性问题并且显示低噪声抗扰性,但是避免了纯集成。无功功率法的特征在于其抗定子电阻变化的鲁棒性,同时避免纯积分,但遭受不稳定[2],[3]。因此,由Schauder [4]首先提出的转子磁通MRAS是最流行的MRAS策略,并且大量的努力集中在提高该方案的性能上。通常,与基于模型的无传感器驱动器的低速操作相关的主要问题与机器参数灵敏度,定子电压和电流采集,逆变器非线性和通量纯积分问题有关[1],[5]。 由于所有基于模型的估计技术依赖于转子感应电压,其非常小并且甚至在零定子频率下消失,这些技术在零速度或大约零速度下失效[5]。
PI控制器广泛应用于工业控制系统应用。它们具有简单的结构并且能够在较宽范围的操作中提供令人满意的性能。因此,在用于MRAS速度观测器的文献中描述的大多数适应方案采用简单的固定增益线性PI控制器来产生估计的转子速度。然而,由于机器参数和操作条件的连续变化,除了存在于逆变器中的非线性之外,固定增益PI控制器可能不能提供所需的性能。自适应控制技术(例如增益调度,其中PI增益随操作条件而变化)经常用于改进控制器性能。不太关注用于研究其他类型的适应机制以用于最小化速度调谐信号以获得估计速度。
在本文中,通过提出两个新的非线性适应机制来代替传统的基于转子磁通的MRAS速度观测器中使用的传统PI控制器来解决这一问题。本文提出了一种基于滑模(SM)理论的新型非线性自适应方案,以提高速度估计性能。新的速度估计适应规律,确保估计的稳定性和快速误差动力学,是基于Lyapunov理论推导的。此外,提出了一种模糊逻辑控制器(FLC)作为另一非线性优化器以使用于转子速度估计的速度调谐信号最小化。基于在开环和无传感器操作模式中的详细实验测试来比较新的和常规方案的性能。 聚焦以低速操作,这代表了MRAS观察者的关键操作区域。
{修订2009年9月24日; 接受日期2009年10月30日。出版日期2009年12月22日; 当前版本的日期2010年5月21日。 TEC-00265-2009。S. M. Gadoue与亚历山大大学电气工程系工程学院,亚历山大21544,埃及(电子邮件:shady.gadoue@ncl.ac.uk)。
D. Giaouris和JW Finch与纽卡斯尔大学电气,电子和计算机工程学院,泰恩河畔纽卡斯尔,NE1 7RU,英国(电子邮件:damian.giaouris@ncl.ac.uk; jwfinch@ncl.ac .uk)。
数字对象标识符10.1109 / TEC.2009.2036445。}
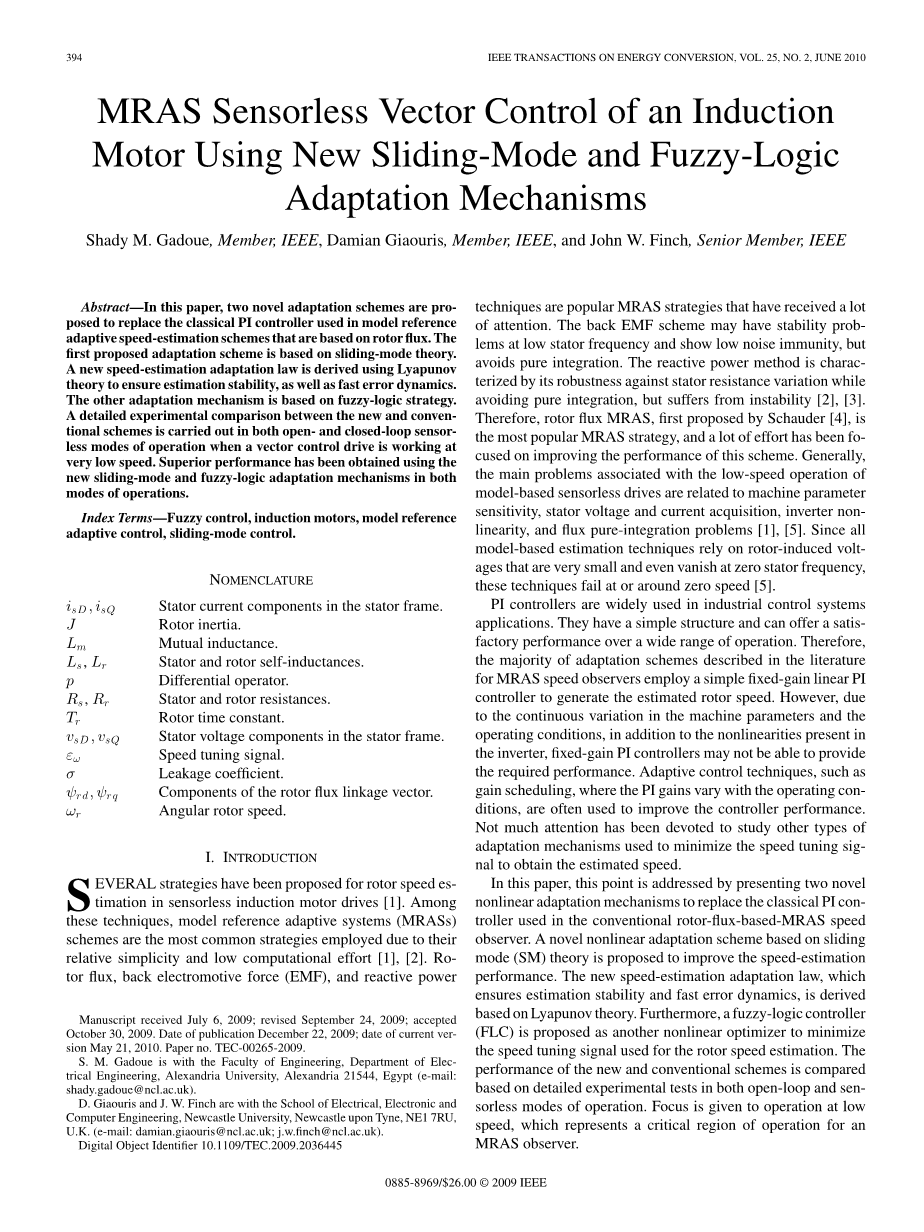
图1常规MRAS速度观测器。
二转子磁通MRAS速度观察器
图1所示的传统转子磁通MRAS速度观测器。 图1的方法主要包括参考模型,自适应模型和产生估计速度的适应方案。参考模型,通常由电压模型表示,代表定子方程。它根据监测的定子电压和电流分量产生静止参考系中转子磁通分量的参考值。从参考模型获得的参考转子磁通分量由[4],[6]。
通常由电流模型表示的自适应模型描述了转子方程,其中转子磁通分量以定子电流分量和转子速度表示。从自适应模型获得的转子磁通分量由[4],[6]。
最后,自适应方案生成要使用的估计速度的值,以便使参考和估计通量之间的误差最小化。在经典转子磁通MRAS方案中,这通过定义要由PI控制器最小化的速度调谐信号εomega;来执行,PI控制器产生反馈到自适应模型的估计速度。速度调谐信号和估计速度的表达式可以表示为[6]。
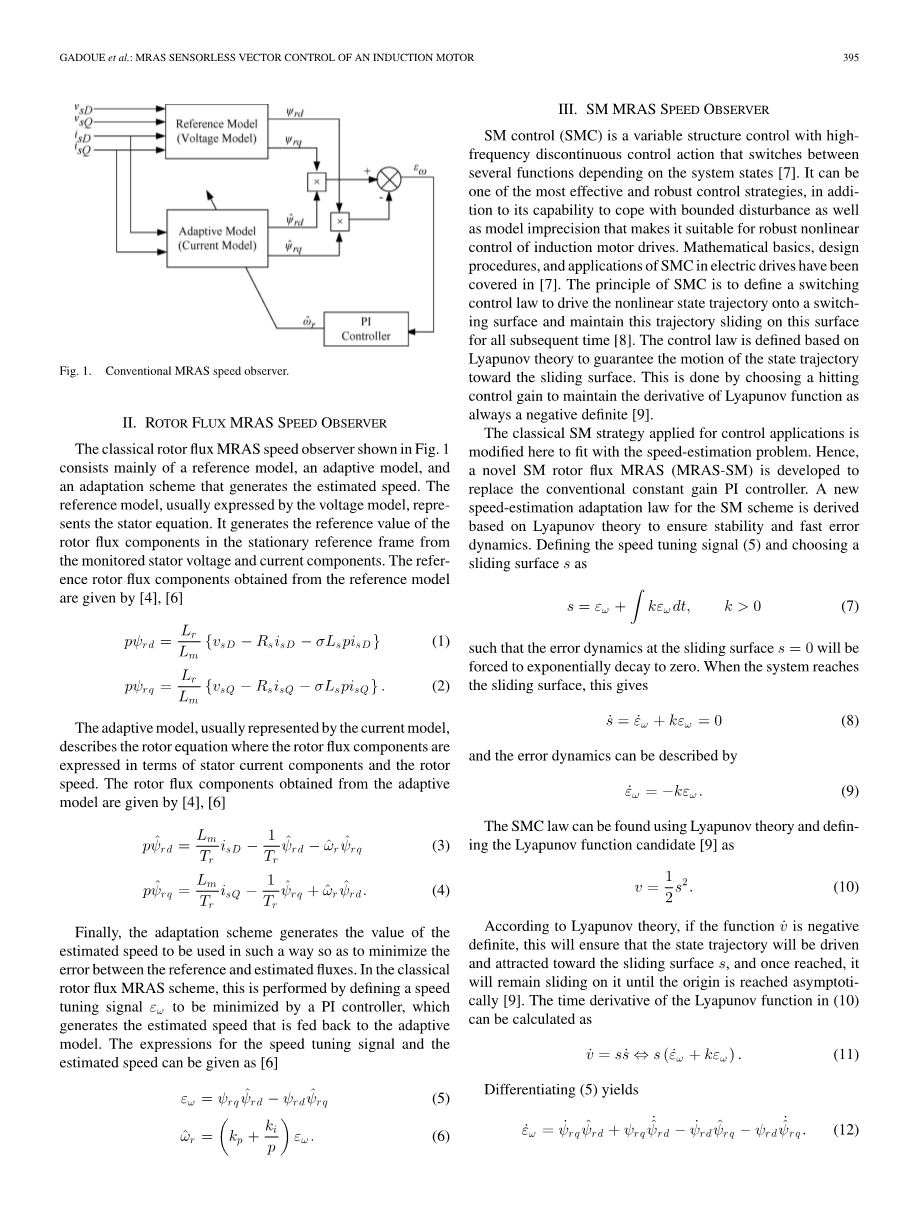
三SM MRAS速度观测器
SM控制(SMC)是一种具有高频不连续控制动作的可变结构控制,根据系统状态在几个功能之间切换[7]。它是最有效和强大的控制策略之一,除了能够应付有界扰动以及模型不精确外,还能使其适合于感应电机驱动器的强大的非线性控制。数学基础,设计程序和应用的电动驱动器已经被涵盖在[7]。SMC的原理是定义一个开关控制律来驱动非线性状态轨迹到开关表面,并保持这个轨迹使所有后续时间在这个表面上滑动[8]。控制定律基于Lyapunov理论来定义,以保证状态轨迹朝向滑动表面的运动。这是通过选择击打控制增益来保持Lyapunov函数的导数作为一个负定义[9]。在这里修改应用于控制应用的经典SM策略以适应速度估计问题。 因此,开发了一种新颖的SM转子磁通MRAS(MRAS-SM)来代替常规的恒定增益PI控制器。基于Lyapunov理论导出了用于SM方案的新的速度估计适应定律,以确保稳定性和快速误差动力学。定义速度调节信号(5)并选择滑动面
使得滑动表面处的误差动力学s = 0将被强制指数衰减到零。 当系统记录滑动面时,这给出
误差动力学可以描述为
SMC定律可以使用Lyapunov理论和定义Lyapunov函数候选[9]
根据Lyapunov理论,如果函数v是负定的,这将确保状态轨迹将被驱动并被吸引向滑动表面s,一旦到达,它将保持滑动,直到渐近到达原点[9 ]。 (10)中Lyapunov函数的时间导数可以计算为
区分(5)得到
将当前模型(3)和(4)代入(12)得到
通过
(13)可写为
(8)可以写为
将(17)代入(11)中得到
这个导数是负定数if
这可以确保if
其中符号函数被定义为
等式(20)表示SM控制器的开关定律,并且可以写为一般形式
其中ueq是定义将状态轨迹保持在滑动表面上的控制动作的等效控制,us是取决于开关表面的符号的开关控制,M是击打控制增益,使得(11)负 确定[9]。没有设计标准来选择M的值; 然而,其值应该选择得足够高以使得(7)中的歧管s = 0有吸引力[9],[10]。 因此,(20)中定义的控制规则将保证(7)中的开关表面s的存在,并且当误差函数εomega;到达滑动面时,系统动力学将由(9)控制,其总是稳定的 [11]。等效和开关控制函数的表达式可以写成
图2MRAS-SM速度观测器。
等效控制ueq的分母中的函数f2的存在可能在所提出的方案的估计性能(如果其值接近零)时引起问题。这个问题可以通过在启动之前允许机器的磁化并且通过将正的小值加到f2来避免。在SMC(20)中使用符号函数导致由于不连续的控制动作引起的高频颤振,这表示当系统状态接近滑动表面时的严重问题[9]。 使用SM适应机制(MRAS-SM)的新型MRAS观测器的框图如图2所示。
四模糊逻辑MRAS速度观察器
FL的各种应用在过去几年中显示出快速增长。 FLC已经在用于解决控制,估计和优化问题的工业控制应用领域中变得流行[12]。 在本节中,提出FL来替代用于常规MRAS速度观测器中的误差最小化的PI控制器。
FL技术已被应用于解决异步电机驱动器的优化问题[13] - [17]。 已经提出在不同的误差最小化应用中替换PI控制器[18],[19]。 对于MRAS速度观测器,转子速度的估计的机制可以被认为是优化问题,其中PI控制器以这样的方式生成数量(即估计速度),以便最小化指定误差, 在反馈回路中的(5)中的速度调谐信号。 因此,FLC可以替代传统的PI控制器来解决优化问题。所提出的FLC是Mamdani型规则库,其中输入是(5)中的速度调谐信号εomega;及其变化Delta;εomega;,其可以被定义为
图3模糊控制器输入和输出隶属函数。(a)错误。(b)错误更改。(c)估计速度的变化。
这两个输入分别乘以两个缩放因子ke和kd。 控制器的输出乘以第三缩放因子ku以产生估计速度的变化率的实际值。 最后,执行离散积分以获得估计速度的值。 因此,创建PI型FLC,其中用于估计速度的表达式可以写为
缩放因子的值的选择极大地影响FLC的性能。 试验和误差技术通常用于调节这些增益,以确保控制器的最佳性能[16]。 FLC的每个变量都有七个隶属函数。 使用以下模糊集:NB =负大,NM =负介质,NS =负小,ZE =零,PS =正小,PM =正中,PB =正大。 FLC的输入和输出的话语范围在-0.1和0.1之间选择,具有三角隶属函数,如图3所示。表1显示了具有49个规则的模糊规则库[16]。 FLC使用MATLAB模糊逻辑工具箱GUI建模。 具有FL速度估计机制(MRAS-FL)的整体MRAS速度观测器如图4所示。
表1pi型flc语言规则库
图4MRAS-FL速度观测器。
图5实验平台。
五实验系统
实验平台,如图1所示。 5,包括由9 kW,240-V,37.5-A单独激励直流负载机负载的7.5 kW,415-V,三角形连接的三相感应电机,以允许单独控制转矩和速度 直流电机。 来自Control Techniques“Mentor”系列的15 kW四象限直流驱动器用于控制直流电机,以在感应电机上提供不同水平的负载,直到满载。 感应电机参数在附录中给出。
交流驱动电源电子器件由50-A三相二极管桥和1200-V,50-A半桥绝缘栅双极晶体管(IGBT)电源模块组成。 为了控制感应电动机,使用dSPACE DS1103控制板,其由运行在400MHz的PowerPC 604e处理器和从属Texas Instruments TMS320F240 DSP。
使用霍尔效应电流传感器来测量电动机线电流。 实际电机速度由5000脉冲/转增量式光学编码器测量。 转子速度测量是允许标准编码矢量控制操作,并且用作无传感器操作的参考。 变频器的开关频率为15 kHz,死区时间为1.5mu;s,矢量控制采用相同的采样频率。 观测器和速度控制回路具有5kHz的采样频率,并且以250Hz的采样频率执行速度测量。
在MRAS方案的实际实现期间,发现有必要在电压模型的输出处级联低截止频率高通滤波器以去除积分器漂移和任何初始条件问题。 截止频率应选择尽可能低,因为目的仅是去除直流分量,因此,选择1 Hz的值。
实现类似于在[20]和[21]中描述的简单的死区时间补偿器,并且在控制单元中可用的参考电压被用于避免需要测量实际定子电压并且将被用于电压模型通量 (1)和(2)中的观察者。
要使用dSPACE卡和Simulink实时使用FLC,将在MATLAB中的FL工具箱中生成2-D查找表,输入的步长为0.0005。 使用查找表的FLC实现在图5中示出。 6,其中输入饱和块的饱和极限设置为0.1和-0.1。
六实验结果
进行广泛的实验测试以比较三个适应方案:使用间接矢量控制IMdrive的PI,FL和SM。 测试在开环和无传感器操作模式下进行。
图7 60 r / min时25%负载干扰抑制的速度估计性能。 (a)MRAS-PI。 (b)MRAS-FL。 (c)MRAS-SM。
- 开环性能
当驱动器作为编码矢量控制操作时,在开环中测试三个适应机制,即,编码器速度用于速度控制和转子磁通角估计。 驱动器在各种负载扭矩水平下经受不
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137107],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

