
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
无机械传感器的永磁步进电机的参数估计
R. Delpouxa, M.Bodsonb,*, T.Floqueta
aLAGIS UMR CNRS8219,里尔中央理工学院,太阳城科学研究,BP48,59651VilleneuvedAscq Cedex,法国
bPEARL,犹他州大学电气与计算机工程系,盐湖城,UT 84112,美国
摘 要
本文提出了一种用于永磁步进电机的新的无传感器参数识别方法。 假设电流传感器可用,但机械传感器不可用。 使用开环命令输入多个速度获得数据。 提出了一种新的模式,其呈现与d-q模式类似的优点,但不需要位置传感器。 该方法利用导出的线性参数化和最小二乘法算法。 在一些情况下,使用消除理论来解决过参数化。 实验发现使用新程序所识别得到的参数非常接近用传感器获得的那些参数。 该方法可能适用于其他类型的同步电机。
关键字:永磁步进电机,同步电机,无传感器系统,参数识别,消除理论
1.引言
永磁步进电机(PMSM)广泛用于工业中的位置控制,特别是在制造业当中应用广泛。 PMSM比电刷式直流电动机更坚固,每单位体积产生更高的扭矩。 它们的控制通常是开环控制,但存在其同步性限制了操作远离共振和高加速度远离轨迹的潜在缺点。这些问题可以通过使用具有足够精度的位置传感器的闭环控制方法来解决 最近的研究集中于是否可以使用无传感器系统实现闭环控制方法的性能。 在这种情况下,无传感器是指不具有位置传感器的系统,但是仍然假定电流传感器可用。
无传感器控制有助于降低应用成本,也有利于应对没有多余的空间安放机械位置传感器的问题。 电流传感器可以通过感应的反电动势电压在非零速度下重建转子的位置(Johnson,Ehsani,&Guzelgunler,1999; Schroedl,2004; Shah,Espinosa-Peacute;rez,Ortega,&Hilairet, Verrelli,2011)。 为了使这种方法成功运用,电机的模型及其参数的值必须是给定或可知的,这带来了难解决的在没有位置或速度传感器情况下的参数识别问题,特别是离线参数识别的最初情况设定的问题。
事实上,电动机制造商提供电动机本身在不带负载情况下的的参数。 此外,这些参数是名义上标注的,因此是不确定的。 最终,无传感器识别可用于提供无传感器控制律的自动调谐,实时自适应以及实现故障检测。
Blauch,Bodson、Chiasson(1993)、Kim、Lorenz(2002)、Mobarakeh和Sargos(2001)几个人研究了PMSM参数的估计,但是需要提供转子位置信息。在Nee,Lefevre,Thelin和Soulard(2000)的研究中,在静止或负载条件下使用特殊信号应用位置无传感器识别,但仅用于识别d和q电抗。在线识别运动参数的其他方法包括Bolognani、Zigliotto、Unterko fler(1997)、Lee、Jung和Ha(2004)提出的方法,但Bolognani et al的方法(1997)仅提供模拟结果,在Lee et al的方法中(2004),只有定子电阻和反电动势常数可以被识别。在Ichikawa,Tomita、Doki、Okuma(2004)、Ichikawa、Tomita、Doki、Okuma(2006)、Yoshimi、Hasegawa和Matsui(2010)的方法中,参数识别在d-q坐标系中实现,使用识别的参数位置估计依赖d-q坐标变换。这种类型的结构在实践中可能是成功的,但是不存在稳定性和收敛的保证,因为参数估计取决于位置估计,反之亦然。
本文提出一种新的实验离线方法,用于识别没有位置或速度传感器的PMSM的参数,使用PMSM的开环指令,并且假设速度等于平稳的基准速度,也就是保持电动机同步。基于一些常见的参数识别方法,如最小二乘法和消除理论,本文的主要贡献来自于变量的新变化生成一个对无传感器应用有利的新参考系。与现有方法相比,该方法具有以下优点:识别所有电参数以及机械参数,导出确保收敛的识别算法,用实验数据验证分析结果。 将没有位置传感器获得的参数结果与根据Blauch等人的方法获得的传感器的结果进行比较。(1993)。通过使用LECIS实验室在Eacute;coleCentrale de Lille可获得的试验台上进行的实验验证该理论。 本文扩展了2012年美国控制会议上提出的结果(Delpoux,Bodson,&Floquet,2012)。与Delpoux等人(2012)相比,本文提供了一种基于电压方程 涉及使用吸收的电功率和机械方程的更广泛的比较方法。该文章分为三个部分。 2.1节介绍了PMSM在三种不同的参考系和本文中使用的识别算法的模型。在第3节中,针对带有位置和速度传感器的电机开发了一个识别程序,以作为比较的基础。 最后的第4节提出了新的识别程序和实验获得的结果。
2初步措施
2.1PMSM模型
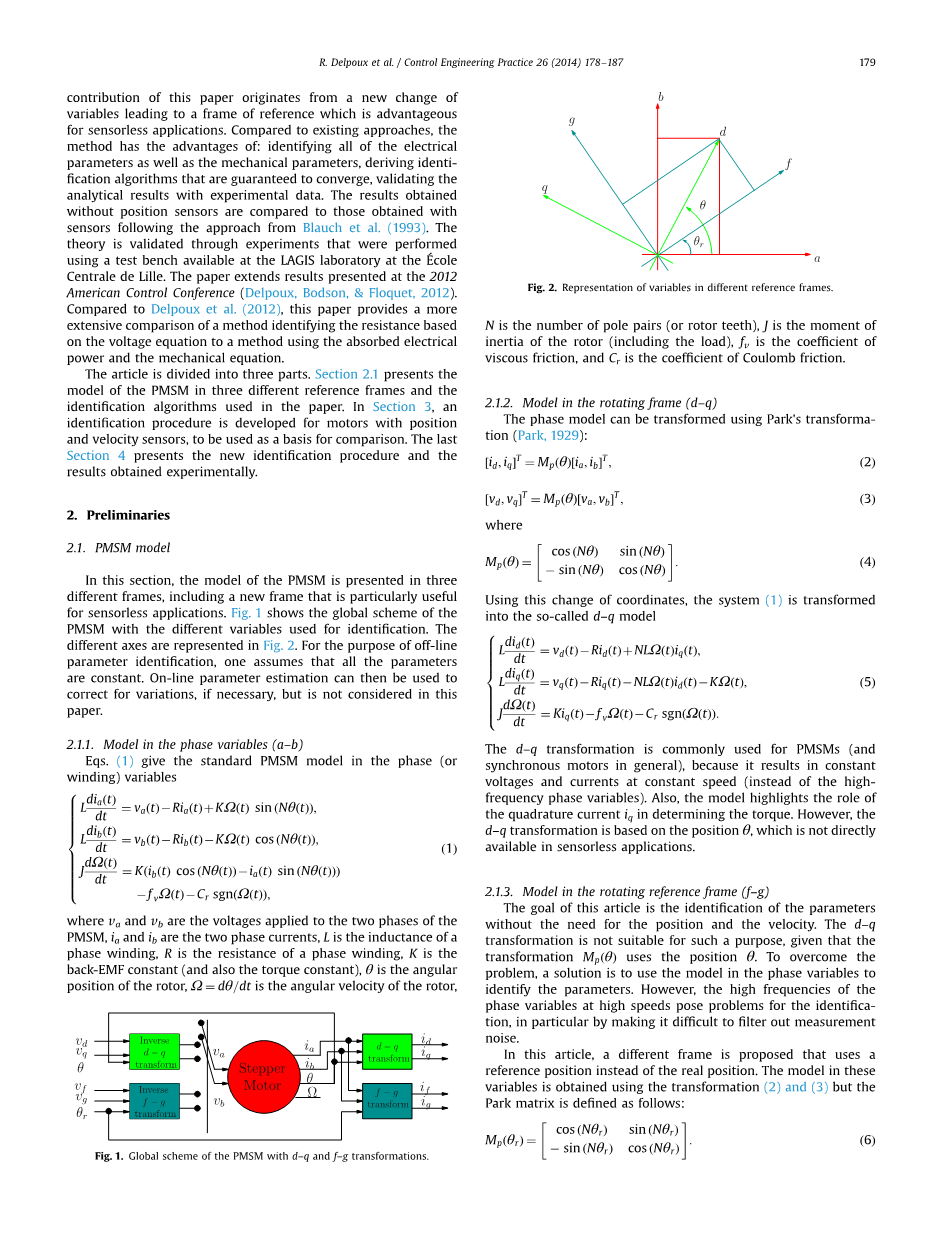
在本节中,PMSM的模型以三种不同的模式呈现,包括对无传感器应用特别有用的新模式。 图1显示了具有用于识别的不同变量的PMSM的全局方案。 不同的轴在图2中示出。为了实现离线参数识别的目的,假设所有参数是恒定的。 然后如果必要话,在线参数估计可用于校正变化,但在本文中不予以考虑。
2.1.1相变量模型(a-b)
方程(1)给出了以相位(或绕组)为变量的标准PMSM模型
(1)
其中va和vb是施加到PMSM的两相的电压,ia和ib是两相电流,L是相绕组的电感,R是相绕组的电阻,K是反EMF常数 (以及转矩常数),theta;是转子的角位置,Omega;=dtheta;/ dt是转子的角速度,N是极对(或转子齿)的数量,J是惯性矩 转子(包括负载),fv是粘性摩擦系数,Cr是库仑摩擦系数。
图1具有d-q和f-g变换的PMSM的整体方案。
图2变量在不同参考系中的表示
2.1.2旋转的模型(d-q)
相模型可以使用Park变换(Park,1929)进行变换:
其中
使用这种坐标变化,系统(1)被变换成所谓的d-q模型。
d-q变换通常用于PMSM(和通常的同步电动机),因为它在恒定速度(而不是高频相位变量)下产生恒定的电压和电流。 此外,该模型突出了交轴电流iq在确定扭矩中的作用。 然而,d-q变换基于磁场位置theta;,这在无传感器应用中不是直接可用的。
2.1.3旋转参考系中的模型(f-g)
本文的目标是识别位置和速度之外的其他参数。 假定变换Mp(theta;)使用位置theta;,那么d-q变换不适合在这种参数识别当中使用。 为了克服这个问题,解决方案是在相变量中使用模型来识别参数。然而,高速下的相位变量的高频率使得参数准确识别存在问题,特别是难以滤除测量噪声。
在本文中,提出了使用参考位置而不是真实位置的不同模式。 这些变量中的模型使用变换(2)和(3)获得,但是Park矩阵定义如下:
变换后的变量中的PMSM模型是:
其中Omega;r=dtheta;/ dt
d-q和f-g坐标通过以下矩阵变换:
其中delta;=N(theta;r(t)- theta;(t)),是两个变换的旋转角度之间的差。
f-g模式在两个方面有潜在有用。 首先,theta;r可以定义为电机应该跟踪的参考位置。 例如,开环电压控制策略在于设置vf = v 0,vg = 0(或任何其它常数值)。 在这种情况下,delta;是转子滞后于参考位置的角度(缩放N)。 theta;r也可以定义为theta;的估计,使用必要的过程来确定。 然后,f-g模型逼近d-q模型,其优点是即使theta;r不完全等于theta;也是有效的并且可计算。 注意,当theta;r=theta;时,f-g帧中的模型与d-q帧中的模型相同。 在本文中,我们考虑第一个选项,即在开环控制策略中将theta;r设置为参考位置。
2.2使用开环命令的恒速运行
对于常数vf,vg和Omega;r,相电压va和vb是具有频率NOmega;r的正弦电压。 如果存在if,ig和delta;的常数值,则电动机将达到恒定速度Omega;=Omega;r
我们提出以下事实:
事实证明, 对于任意Omega;r,假设电压足够大,存在f-g模型的稳态平衡Omega;=Omega;r。
令V,alpha;,Z,beta;使得
然后,(10)的第一个两个方程的解给出
令V足够大,可以使得右侧的幅值远远小于1,则可以求解delta;的方程,并且delta;的值可以在前面的方程中代入以获得if和ig。 因此,存在平衡状态,其对应于原始相位变量中的极限循环。
注释:delta;的方程通常具有两个解。然而,第二个通常是不稳定的,两者也都可能是不稳定的。系统在f-g模式中的局部稳定性可以通过在平衡状态周围线性化非线性的f-g模型来确定。这样的分析通常必须以数字方式进行(参见Verghese,Lang,&Casey,1986,用于详细分析)。通常,使用步进电机的分析和实验表明,平衡在低速下是稳定的,但在高于某一阈值时变得不稳定。一些电动机在高于第二阈值的速度下再次变得稳定,如在本文的实验中使用的电动机的情况。即使对应于f-g框架中稳定平衡的速度,摩擦转矩和弱阻尼模式中的波动也会导致参考点周围的位置和速度发生振荡。因此,在一段时间内过滤数据是有用的。实际上,在Omega;=Omega;r处未达到稳定平衡的电动机通常停转,使得可以在没有位置传感器(至少在操作者视觉上)下检测到缺少同步。在本文的分析和实验中,假设在f-g帧中使用开环命令时,总体来说Omega;=Omega;r。
2.3 识别算法
2.3.1 最小二乘法识别
本文的识别过程的核心是最小二乘法算法(Blauch 等,1993;Souml;derstrouml;m&Stoica,1989)。 当方程相对于要估计的参数是线性的时,应用最小二乘算法。 具体来说,假设
其中y [n]是输出向量,n是索引或时刻,W [n]是回归矩阵,pnom是标称(未知)参数向量。 给定y和W的测量值,目标是确定p,估计标称参数矢量pnom的值。 误差方程通过从估计输出中减去实际测量输出而形成。 通过定义,残留误差等于在一个区间[N0; N1]。 最小二乘估计使残留误差最小。在理想条件下,通过设置相对于p等于零的残差的导数导出估计
2.3.2消除理论
在一些情况下,可以获得线性参数化,但是仅使用彼此不独立的一组参数。虽然可以使用线性最小二乘法算法来识别向量p,但是该问题通常在数值上难以调节,并且向量的元素可能不满足约束条件。 当过参数化模型中的参数与最小参数组合理相关时,可以通过使用消除理论来处理过参数化(Chiasson&Oteafy,2011; Wang,Bodson,Chiasson,&Tolbert,2005; Wang,Chiasson, Bodson,&Tolbert,2005)。
2.4实验平台
图3 PMSM测试台
使用Eacute;coleCentrale de Lille的LECIS实验室开发的步进电机测试台(见图3)进行实验。 由制造商提供的具有串联线圈的电动机的参数是:L = 6.4mH,R = 2.6Omega;,K = 0.3Nm A-1,fv = 10-3和J = 5times;10-4 kg m2。 注意,这些参数是独立于测试台的电机的参数,其中改变一些参数, 极对数为N = 50。每个线圈的输入电压va和vb由dSPACE卡的两个D / A输出提供,并由两个线性放大器放大。使用霍尔效应传感器测量电流ia和ib,精度为额定电流In = 3A的1%。电源提供最大电压vmax = 30V和imax = 3A。对该控制来说实验的采样周期为常数,其值等于10-4 s。
3. 使用位置传感器的参数识别
d-q模式对执行识别是有吸引力的。 大多数变量可以使用在恒定速度下的稳态测量来估计,并且因为d-q变量可以在数据的批次上被平均,可以减少噪声和未建模效应的影响。 这些影响包括定位转矩,电压中的放大器偏差,电流中的测量偏差和放大器失真。
3.1 使用稳态测量的参数估计
3.1.1识别场景
当速度恒定达到稳态时。 使用d-q模式,可以容易地对电动机施加恒定电压vd和vq。 在短时间之后,电动机的变量稳定,达到稳态,可以产生恒定的速度和电流。 在实践中,实际上在速度和d-q电流中存在小的振荡,但是这些振荡可以被抵消。 因此,用于识别的必要变量在短时间段内被记录并且被平均,为最小二乘法算法产生一个数据向量。 在稳定状态下,d-q帧中的电机方程由下式给出
其中表示变量gamma;的平均值。
为了获得足够的数据集,对不同的电压重复该过程。 平均稳态下的方程组由下式给出
其中n指实验的次数。 注意,不同的电压可以产生相同的速度,并且有意地应用多个值以增加数据的丰富度。
本文考虑了在存在机械传感器时用于识别参数的两种
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137164],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

