英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
采用协调下垂控制的独立直流微网运行分析
Hyun-Jun Kim, Tae-Hee Han, Byung-Moon Han
电气工程学院
明知大学
龙仁,韩国
erichan@mju.ac.kr
摘要
本文针对独立直流微网,提出了一种基于协调下垂控制的新的运行方法。对于包含DG(分布式电源)以及电池SOC(荷电状态)管理系统的直流微网,本文拟采用的协调下垂控制可以提高微网的稳定性和效率。通过计算机,对采用协调下垂控制的直流微网进行了仿真。在研究中,基于仿真结果,建立了一个3KW的仿真硬件仿真平台并用其对拟采用的系统性能进行分析。研究所涉及的先进的仿真模型以及硬件仿真平台可以用来设计实际的独立直流微网并分析其性能。
关键词:
直流微网,自主控制,下垂控制,DG(分布式电源),BES(储能电池),SOC(荷电状态)管理,MPPT(最大功率点跟踪)
1 绪论
独立微网是一个与公共交流电网没有任何连接的小功率电网。它仅由可再生电源,发电机,BES(储能电池),和负载组成。独立微网可以由交流网或者直流网来构建。
由交流主干网络构成的独立交流微网存在着许多固有缺陷,例如同步性、稳定性以及无功功率补偿等。然而,独立直流微网却不存在这些。由于仅仅通过一级功率变换器直接进行连接组网,直流微网具有较低的功耗与成本。独立直流微网可以直接为数字化负载供电,这些负载,诸如电脑、通信设备、自动化设备等,内部仅使用直流电[1-3]。
独立直流微网的控制方法可以一分为二。一个是根据在发电或者储能操作模式进行实时控制,检测出所消耗的功率并通过高速通信网络传输到主控制器[4-5]。如果微网中可以设置主控制器和分控制器之间的高度数据传输通道,这种方法可以带来高度的安全运行。另一种方法是一种无需通信连接的自主控制,在这种方式中,变换器的输出电压通过下垂控制法进行控制[6-10]。这种方法在性能上有所降低因为在变换器之间产生的环流。这种方法还会带来频繁的瞬态现象以及缓慢的动态响应过程。
本文针对独立直流微网提出了一种新型的基于协调下垂控制的运行方法。研究中采用PSCAD/EMTDC软件仿真对采用所述控制方法的独立直流微网进行分析。基于仿真结果,建立了一个3KW的仿真硬件仿真平台并用其对拟采用的系统性能进行分析。
2 独立直流微网
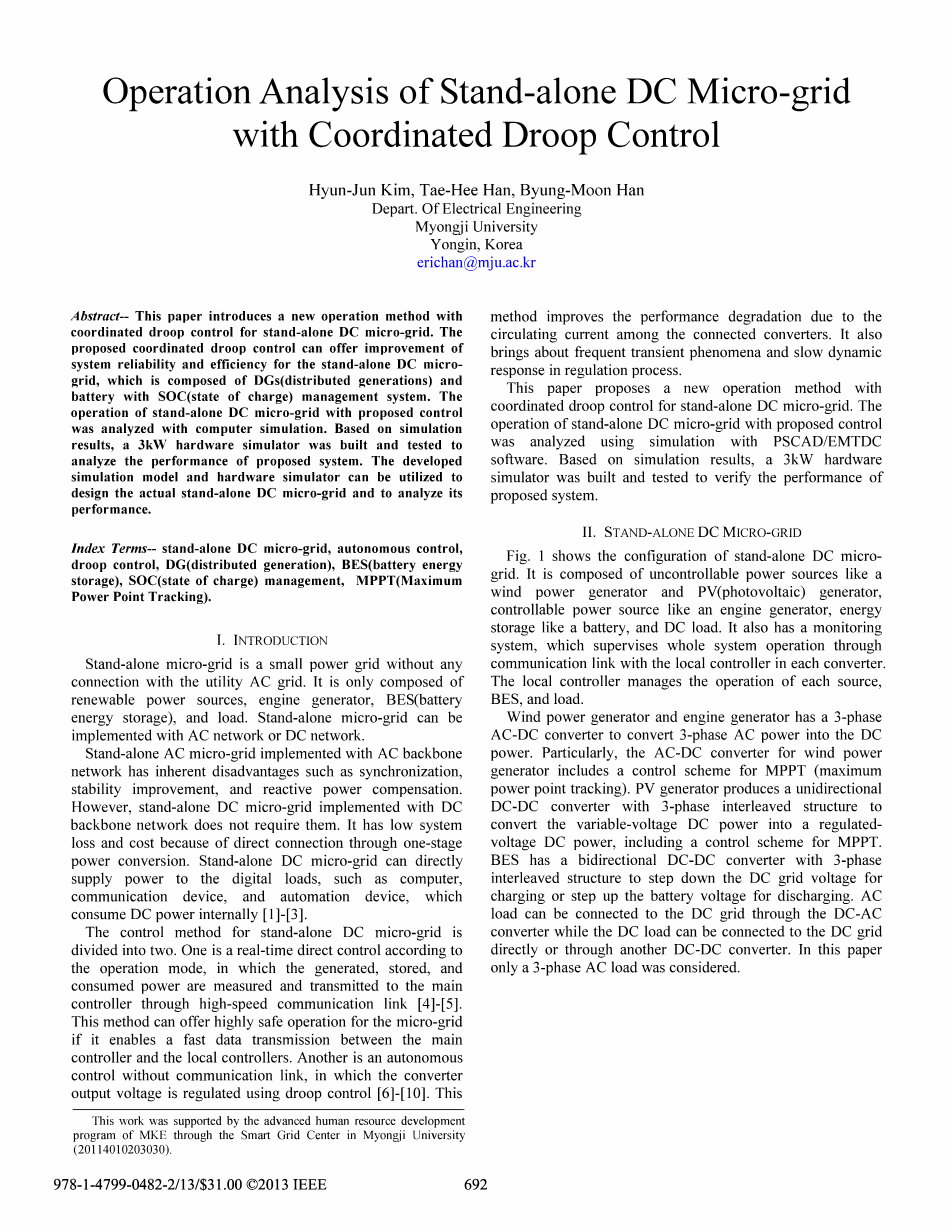
独立直流微网的构成如图1所示。它由不可控的电源例如风力发电机和光伏电池,可控电源例如动力发电机,储能装置例如电池,以及直流负载构成。它也包含一个监视系统,可以通过与各个功率变换器的分控制器的通信连接对系统的运行进行管理。分控制器对每一个电源、储能电池以及负载进行管理。
风力发电机和动力发电机配备了三相AC-DC变换器把三相交流电转换为直流电。特别的是,风机的AC-DC变换器包含了MPPT(最大功率点跟踪)控制方法。光伏电池配备了一个具有三相交错结构的单向DC-DC变换器,同时包含了MTTP控制方法。BES配备了一个三相交错结构的双向DC-DC变换器实现充电时对直流母线电压的降低以及放电时对直流母线电压的抬升。交流负载可以通过DC-AC变换器与直流电网进行连接,同时,直流负载可以直接连网或者通过另一个DC-DC变换器。在本文中,只考虑一个三相的交流负载。
图1独立直流微网系统结构
3系统设计理念
既然独立直流微网的运行不依赖任何与公共交流电网的连接,保持功率的平衡是一个衡量系统运行稳定性的重要因素。本文拟采用针对于发电电源和BES的协调下垂控制来实现功率平衡。图2所示为一个实施协调下垂控制的概念图,协调下垂控制针对传统的下垂控制,保留优点,舍弃缺点。在根据SOC确定安全运行范围时,考虑到了电池的保护以及生活的扩展。
图2 独立直流微网设计理念
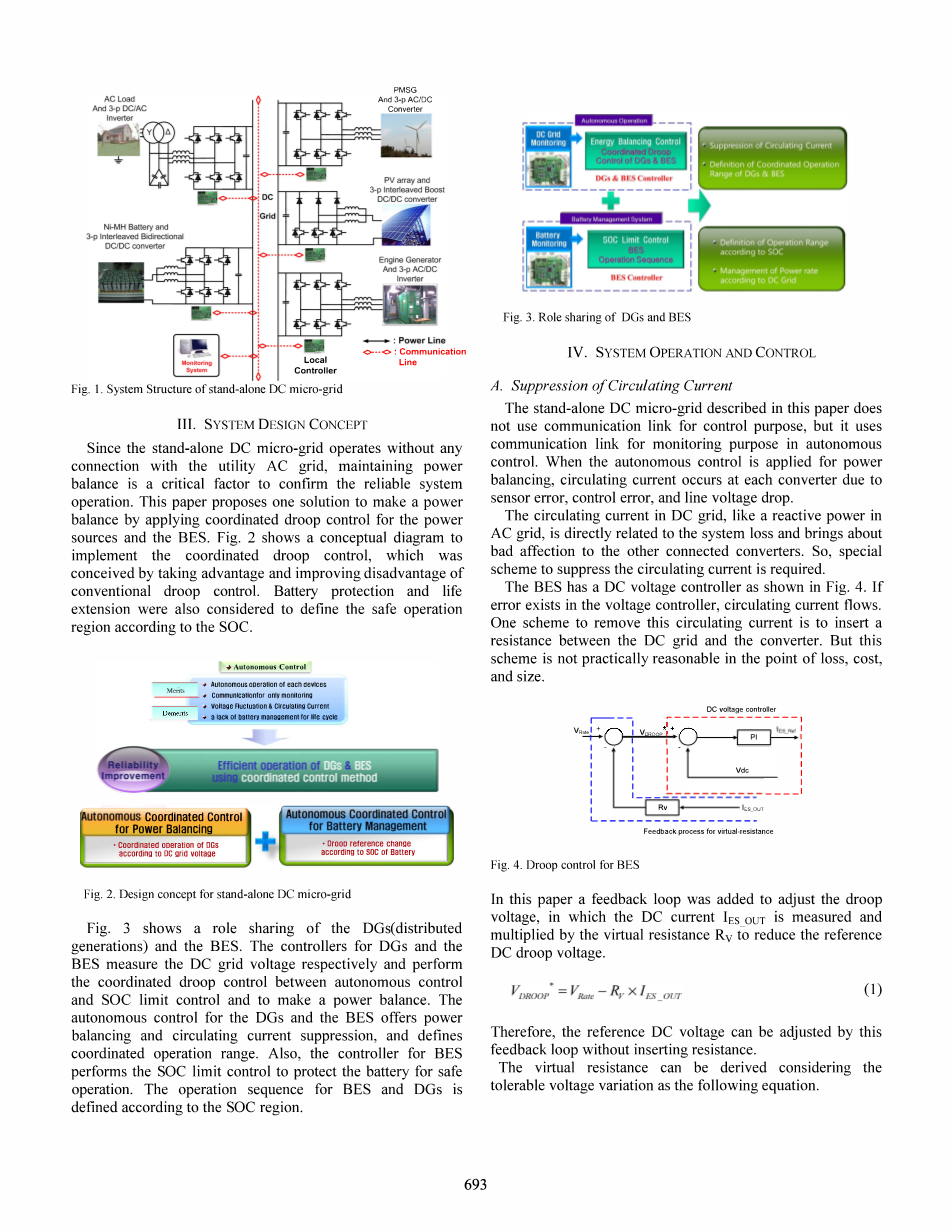
图3所示为一种DG与BES的任务分配方案。DG与BES的控制器各自检测直流电网的电压并且在自主控制和SOC限制控制之间运行协调下垂控制并使得功率平衡。DG与BES的自主控制提供了功率的平衡与环流的抑制,并且确定了协调运行的范围。同样,BES的控制器执行SOC限制控制来保护电池以实现安全运行。BES与DG的运行规则由SOC部分来确定。
图3 DG与BES任务分配
4系统运行与控制
A.环流抑制
在本文中描述的独立直流微网没有使用通信连接来达到控制目的,但是使用了通信连接来实现在自主控制下的监视目的。当自主控制用于微网的功率平衡时,由于传感器误差、控制误差以及线路压降,环流发生在每一个功率变换器处。
在直流电网中的环流,如同交流交流电网中的无功功率一样,与系统的损耗直接相关,并且会对其他相连的变换器产生负面的影响所以,系统需要一种抑制环流的特殊措施。
BES配备了一个如图4所示的直流电压控制器。当电压控制器存在误差时,环流产生。解决这种环流的方法之一是在变换器与直流电网之间设置一个电阻,但是这种方法在损耗、成本与体积的考量中不是切实合理的。
图4 BES下垂控制
在本文中,为了控制下垂电压,添加了一个反馈回路来减小参考直流下垂电压,其中,下垂电压由测得的直流电流IES_OUT与虚拟电阻RV相乘得到。
(1)
所以,参考直流电压可以在没有加入电阻的情况下通过这个反馈回路控制。考虑到如下面方程所示的可容忍的电压变量,虚拟电阻是可以派生出来的。
(2)
其中,Vmin是最小的直流电网电压,PRate是额定的变换器电容
B.协调下垂控制
一种针对拟采用的用于BES控制器的协调下垂控制方法的运行方式如图5所示。下垂电流根据直流电网电压与电池SOC被分为三个部分。下垂电流的斜率在不同的区域有不同的值。所以,虚拟电阻在不同区域也有不同的值,这些不同的区域根据公式(1)产生了下垂电压的参考值。
图5 BES协调下垂控制
A区域位于直流电网电压的 3~ 5%或-3~-5%。在这个区域,电池运行于100%的额定功率。在这个区域,虚拟电阻由公式(3)得到。在超过3%区域,发电机减小输出功率限制直流电网中的剩余功率。在低于-3%区域,发电机增加输出功率来补充直流电网中的缺乏的功率。
B区域位于直流电网电压的-3~ 3%。在这个区域电池运行于70%额定功率。虚拟电阻由公式(4)得到。
C区域被定义为针对电池过充或者过放的保护区域。在这个去榆中,变换器立即减小充电或放电功率来保护电池。运行功率为10%的额定功率,此时虚拟电阻由公式(5)得到。
(3)
(4)
(5)
图6为DG和BES协调下垂控制的运行范围。风力发电机和光伏电池,由于其输出功率的不稳定性,在正常条件下运行于MPPT模式。然而,如果直流母线电压由于剩余功率的产生而上升到比正常值高5%时,这些发电装置将放弃MPPT模式,转而进入辅助模式。如果在直流电网中出现了功率缺乏并且母线电压比正常水平降低3%时,设备将转至MPPT模式。
动力发电机根据三种运行情况调整输出功率。当直流母线电压误差在-3%到 3%时,动力发电机只保证基本的负载。当母线电压位于-3%到-5%区域时,直流电网中缺少的功率将由动力发电机提供,来维持正常功率。当母线电压位于 3%到 5%区域时,直流微网中的过剩功率使动力发电机减小输出负载以节省燃料。
图6 DG与BES工作范围
如图7所示,BES有最大和最小的运行范围限制。然而,实际的运行却是在较高运行限制与较低运行限制之间的,较高与较低运行限制与最大和最小运行限制保持一定的余量。
在这个区域,电池的功率变换器操控了70%的额定功率或者100%的额定功率。如果SOC状态超过了较高运行限制或者低于较低运行限制,控制器会调整虚拟电阻来承担10%的额定功率。
图7 电池SOC的限制控制
C.BES运行策略
BES的运行策略如图8所示。当电池的SOC在50%到80%之间时,采用下垂控制实现功率平衡控制。运行区域A,B,C将依据直流母线电压值来确定。
如果直流母线电压比正常值降低了3%以上,下垂控制工作在区域A。BES的输出功率设定为100%的额定功率。如果直流母线电压在正常值附近-3%到3%以内,下垂控制工作在区域B。BES的输出功率设定在70%的额定功率。如果直流母线电压比正常值升高了3%以上,下垂控制工作在区域A,ES的输出功率设定为100%的额定功率。
当电池的SOC高于85%时,系统检测直流母线电压是否高于400V,如果高于400V,下垂控制工作在区域C。BES的输出功率设定在10%的额定功率。否则,电池由充电模式调整至放电模式。
当电池SOC低于55%时,系统检测直流母线电压是否高于400V,如果高于400V,下垂控制工作在区域C。BES的输出功率设定在10%的额定功率。否则,电池由充电模式调整至放电模式。
图8 BES工作顺序
D.功率变换器控制结构
图9为独立直流微网的功率变换器控制结构。PV变换器运行于最大功率点时是一个光照与温度的非线性函数。考虑到运行的稳定性与实现的简便性,MPPT采用了扰动观察策略。PV控制器包括了电流控制,来实现MPPT方式。风力发电机的功率变换器也使用MPPT方式运行,在这种方式下,通过调整风扇叶片的偏转角,在各种风速下都能实现最大功率地输出。风机功率变换器包括了外环的速度控制和内环的电流控制。动力发电机根据设定量调整输出的功率。动力发电机的功率变换器同样包含了外环的速度控制和内环的电流控制。BES控制器包含电流控制和直流电压控制。BES依据电流值的符号来进行充电或者放电。在这个控制器中,使用了图5所示的下垂控制方法。直流微网上可以挂接三种形式的负载,分别是直流负载,单相负载和三相负载。然而,在直流微网中只假定接入了三相负载。
图9 独立直流微网功率变换器控制
5 计算机仿真
为了验证协调下垂控制,使用PSCAD/EMTDC软件运行了多种仿真。其中,功率电路和PWM变换器使用了软件内置的模型,而例如DG及其控制器使用C语言编程的用户自定义模型[11]。
在仿真中使用的运行模式按照根据表1中列出的负载需求变化得到的时间间隔来布置。在此假定负载需求按照阶跃的变化增加或减小。光伏电池的光照数据以及风力发电机的风速数据根据表2所示按照一定时间间隔来变化,这些数据引起了输出功率的起伏。表3汇总了在直流微网中每一个部分的仿真参数。为了在一个较短的仿真周期内确定BES的运行方式,会对BES的工作范围进行有目的的调整。表4描述了所有的需要验证的部分。
表1 运行方案
表2 光照与风速数据
表3 各元件参数
负载需求功率,PV输出功率,风机输出功率,动力发电机功率以及BES功率如图10(a)所示。风力发电机和光伏电池根据风速数据和光照数据以MPPT控制方式产生输出功率。负载的功率需求恰好由风力发电机,光伏电池,动力发电机和BES提供。直流微网中的功率平衡可以通过图5所描述的协调下垂控制来实现。
直流母线电压,电池SOC,电池电压和电池电流如图10(b所示)。当协调下垂控制工作时,直流母线电压可以反映出一些瞬态变化。然而,电压值位于380V至420V之间,这意味着协调下垂控制有效地工作了。电池的SOC只在最大与最小限制之间的区域变化来保护电池。电池的电压在215V到240V之间的安全运行区域。并且在电池的充放电过程中,电流都没有超过20A。
关于协调下垂控制下BES在区域A和B的输出电流的直流电网电压变化如图10(c)所示。关于协调下垂控制下区域C的微网电流的电压变化如图10(d)所示。在仿真中获得的两条曲线都与图5中的协调下垂控制曲线十分相似。
(a)
(b)
(c)
(d)
图10 仿真结果
6 完整运行测试
根据仿真结果,在实验室中建立了一个3KW的独立直流微网硬件仿真平台。图11展示了针对完整运行测试的试验性的硬件仿真平台的搭建。硬件仿真平台包含了风电仿真器,光伏电池仿真器,集成直流微网,动力发电机,Ni-MH电池组,主控计算机以及可调直流负载。完整运行测试的实验数组显示在16通道电子示波器中。每个功率变换器都安装在小的金属抽屉中。直流母线安装在直流微网集成系统的背面,在直流母线上,所有的输出末端如DG、BES和直流负载都连接在一起。
风电仿真装置和光伏电池仿真装置可以根据风速和光照提供任意的输出功率。BES配备了一个利用CAN总线通信的可以提供SOC的BMS(电池管理系统)。
图12(a)为光伏电池输出功率、风电输出功率、动力电池输出功率和负载需求功率。图12(b)为直流电网电压和电池SOC。当协调下垂控制工作时,直流母线电压可以反映出一些瞬态变化。然而,电压值位于380V至420V之间,这意味着协调下垂控制有效地工作了。负载的功率需求恰好
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137178],资料为PDF文档或Word文档,PDF文档可免费转换为Word

