英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
第一节。介绍
无刷直流电机(BLDCM)由于其结构简单,功率密度高,可靠性高,在许多工业应用中受到了极大的关注[1] - [3]。然而,较大的换向转矩波动可能导致振动和噪声,这限制了其在高精度伺服系统中的应用。因此,换流转矩脉动减小对于BLDCM的扩展应用具有重要意义。
关于换向转矩波动的原始分析研究在[4]中给出 ,其中指出,通过保持非换向相电流稳定,可以减小达到平均转矩的50%的换向转矩脉动。采用不同的脉冲宽度调制(PWM)方法来保持非换向相电流在换相周期期间稳定 [5] - [12]。在[5] - [9]中 ,电机速度被分为高速和低速,并且根据不同的速度范围分别使用在换向周期期间的不同的两相调制方法。然而,当电机在高速和低速的切换条件附近操作时,将出现由速度波动引起的调制方法的频繁切换,这可能降低系统的稳定性。因此,在换相周期期间使用[10],[11]中的三相调制方法来在整个速度范围上保持稳定的非换向相电流。然而,需要在正常导通周期和换向周期之间切换调制方法,这使得调制器设计复杂化。此外,在正常导通周期和换向周期期间,相同的两相调制方法用于简化[12] 中的调制器设计,其中PWM仅在换相周期期间应用于非换向相位。
为了降低高速范围内的换相转矩脉动,在文献[15]和 [16]中引入了一种DC-DC转换器来提高三相桥式逆变器的输入电压。在[15] 中增加了Z源逆变器,通过调整直通矢量的占空比获得逆变器所需的输入电压,以保持非换向相电流稳定。然而,在正常导通时段和换向时段期间,逆变器的输入电压都大于电源电压。在 [16]中,在正常导通周期期间,BLDCM由电源电压供电,并且通过SEPIC转换器调整所需的换向周期电压。在换向期间,SEPIC转换器通过开关选择电路施加以抑制换向转矩波动。然而,转换器仅在换向周期中使用,并且换向转矩纹波抑制的效果取决于SEPIC转换器的动态响应。
在换向转矩脉动减小的领域中,对于现有方法仍然存在几个挑战。为了避免开关调制方法,换向转矩脉动减小策略应该应用在整个速度范围上。此外,在正常导通时段和换向时段期间应当采用相同的调制方法。为了有效降低高速范围内的换相转矩脉动,需要对DC-DC转换器提高三相桥式逆变器的输入电压,满足换相周期的电压需求; 同时,应尽可能提高DC-DC转换器的利用率。
Cuk转换器作为基本的DC-DC转换器具有连续输入和输出电流和低输出电压纹波的优点[17],并已被用于驱动BLDCM [18]。近年来,Cuk转换器的研究主要集中在拓扑理论,PWM技术和控制方法[19] - [23]。Cuk转换器具有三种输出模式(降压模式,升压模式和降压 - 升压模式),不同模式以相同的工作原理输出不同的电压 [24],这提供了提高三相输入电压的可能性桥式逆变器。
在本文中,模式选择电路被设计为改变Cuk转换器的输出模式。在换向周期期间,Cuk变换器以升压模式操作,并且其输出电压可以满足换向周期的电压需求,使得通过在整个速度范围上保持非换向相电流稳定,可以有效地减小换向转矩波动。在正常导通期间,Cuk转换器以降压 - 升压模式操作,并且通过PAM方法调节三相桥式逆变器的输入电压,而不需要逆变器PWM斩波,这可以减少电动机绕组引起的电压尖峰损坏通过逆变器中MOSFET的导通/关断,简化调制方法的程序,提高Cuk转换器的利用率。
第二节。BLDCM的换向扭矩波形分析
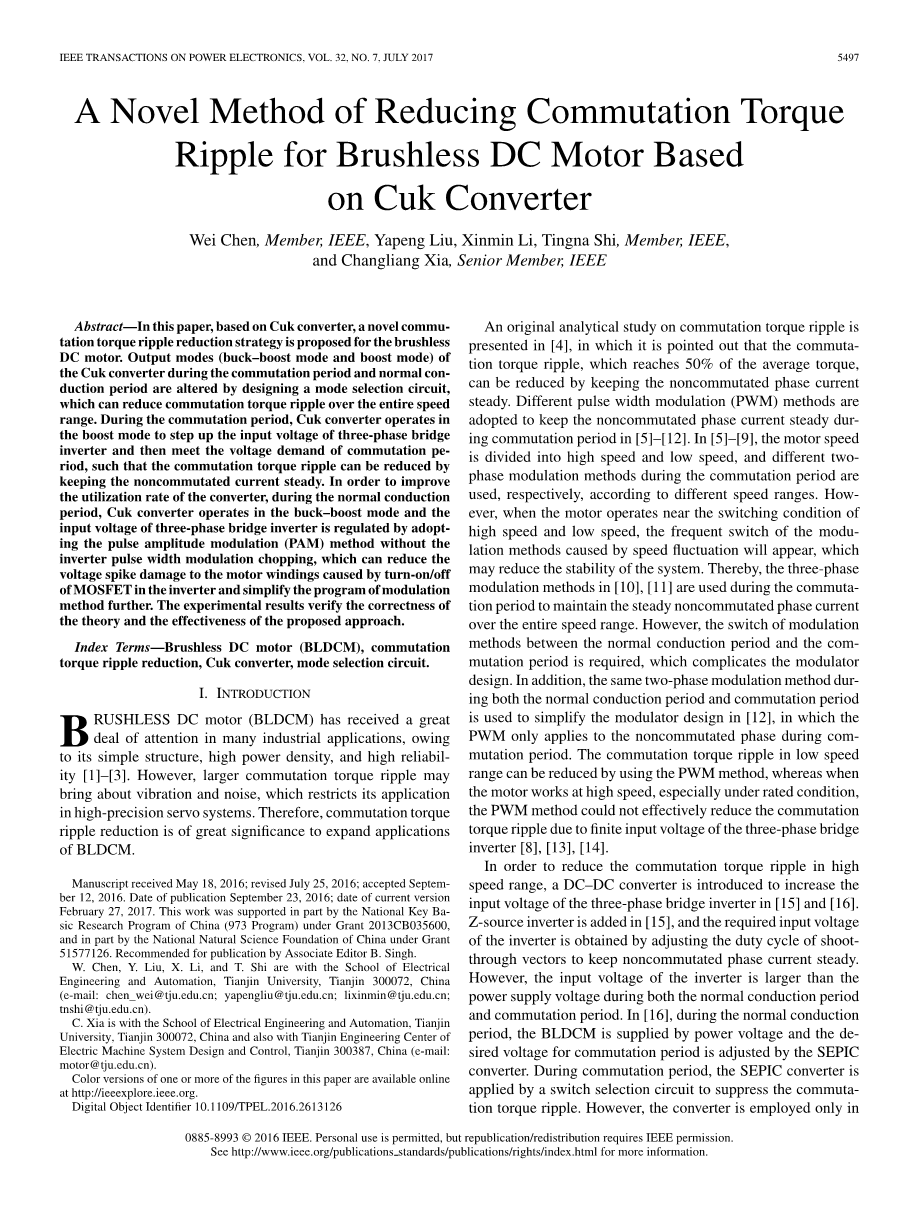
假定三相对称定子绕组的BLDCM驱动系统的等效电路如图1所示。1。每相绕组可以等效于串联的电阻,电感和反电动势(EMF)。
BLDCM的三相端电压表示为
其中ua,ub和uc是三相的端电压定子绕组,ia,ib和ic是相电流ea,eb和ec是相位反电动势,R是相电阻,L是相电感,uNo是中性点电压电机。
BLDCM的电磁转矩Te由下式给出
其中omega;m是转子机械角速度
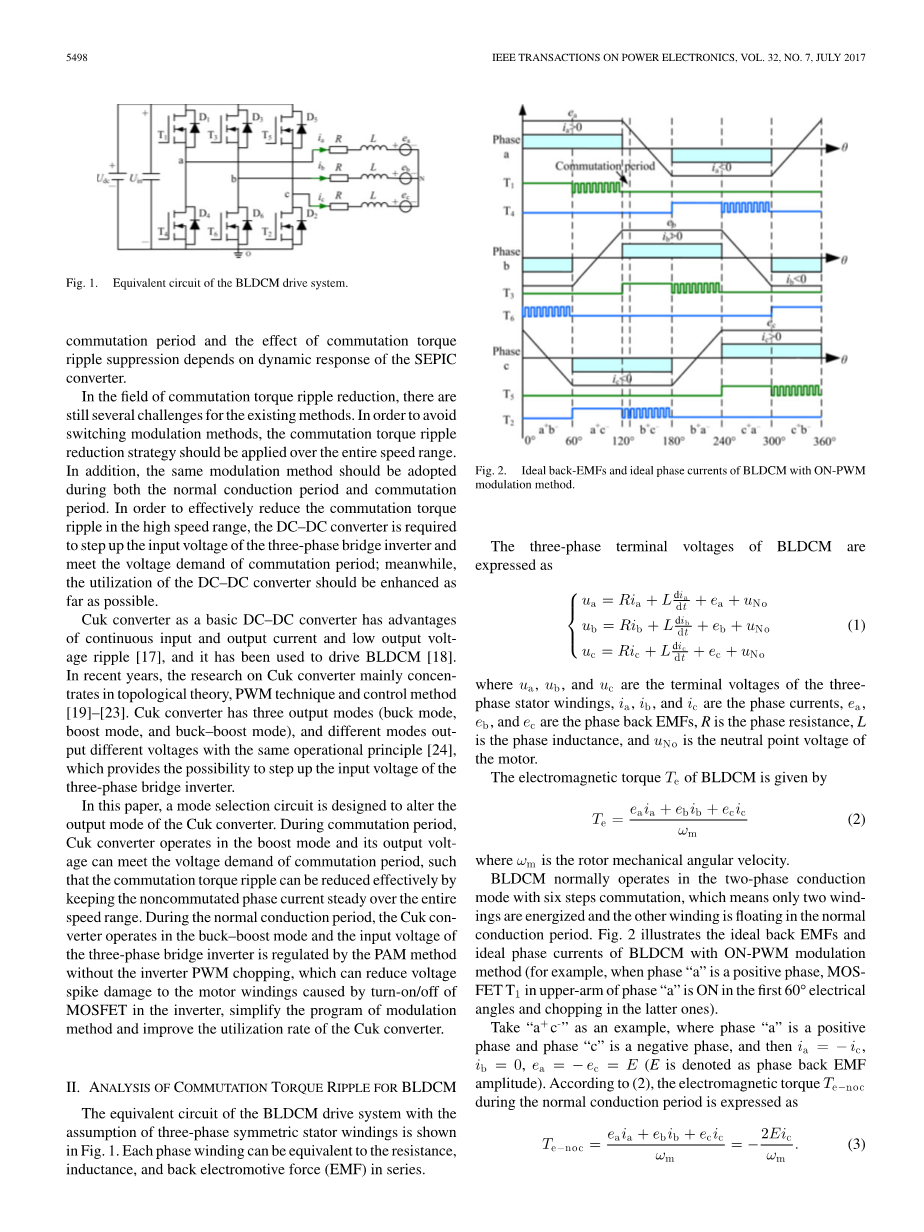
BLDCM通常在具有六步换向的两相导通模式下操作,这意味着在正常导通时段中仅两个绕组被激励并且另一个绕组浮动。图。图2示出了利用ON-PWM调制方法的BLDCM的理想反电动势和理想相电流(例如,当相位“a”为正相时,相位“a” 的上臂中的MOSFET T 1在第一60 °电角度并在后者中斩波)。
取“a c-“作为示例,其中相位”a“是正的相位和相位“c”是负相位,然后ia = -c 1,ib = 0,ea = -e c = E(E表示为反相EMF振幅)。 根据(2),电磁转矩Te-noc在正常导通期间表示为
根据(3)和(4),可以减小转矩波动通过保持非转换电流ic稳定,这可以通过适当的PWM方法实现。 避免开关调制方法,采用相同的调制方法正常导通周期和换向周期两者PWM在非交换相MOSFET期间施加换向周期。 通过采取换“a c-“〜”b c-“作为示例, 图3示出了电流in三相绕组。如图1所示。 如图3所示,流出相电流续流二极管D4和MOSFET T3导通,PWM施加到MOSFET T2。 忽略电压降的续流二极管,三相端电压BLDCM在换相期间表示为
其中d是T2的占空比,Uin是输入电压三相桥逆变器。
通过将(5)中的等式加在一起并考虑ia ib ic = 0,平均中性点电压UNo可以派生为
根据(5)和(6)中的第三个等式,非换向电流变化率被导出
通过将(7)设置为零以保持非转换电流稳定,占空比d可以得到
根据(8),由于0 d 1,d是上阈值1,当4E-3icRge;Uin时dic / dt = 0。 换一种说法,不能有效地减小换向转矩波动具有三相有限输入电压的高速范围桥式逆变器。 如果变频器的输入电压满足Uinge;4E-3icR在换向期间,换向转矩波动将在高速范围内有效降低。
III。 CUK转换器的不同输出模式
Cuk转换器具有不同的输出电压输出模式。 Cuk转换器在降压 - 升压模式和升压模式如图1所示。 图4(a)和(b)。分析了Cuk转换器的工作原理如下。 Cuk转换器的等效电路示出了T7为ON和OFF的降压 - 升压模式。 图5(a)示出了Cuk转换器的等效电路在降压 - 升压模式下,其中MOSFET T7导通二极管D9截止。 同时,电感器L1和L2存储存储能量,我们有
其中iL1和iL2是流过电感器的电流L1和L2,uC1和uC2是电压
电容C1和C2。 图5(b)示出了Cuk转换器的等效电路在降压 - 升压模式下,其中MOSFET T7截止二极管D9导通。 同时,电感器L1和L2释放能量,并且忽略续流二极管的电压降,
我们有
在调制周期Ts内,电感器L1和L2都为零。 根据(9)和(10),我们有
其中dc是MOSFET T7的占空比,以及UC1和UC2是电容C1和C2的平均电压,分别 由(11),我们有
从图。 5和(12),输出电压Uout1的Cuk转换器在降压 - 升压模式中被导出为
通过比较图1。 如图4(a)和(b)所示,已知两种不同的输出模式具有相同的操作
原理。 换句话说,公式(9) - (12)也适用于升压模式下的Cuk转换器,其中从中获得Cuk转换器的输出电压Uout2图。 4(b)
从上述分析,Cuk转换器在不同输出模式具有不同的输出电压操作原理。 此外,Cuk的输出电压转换器在升压模式下Uout2总是大于电源电压Udc,这提供了可能性提高三相桥式逆变器的输入电压。
第四节。减少换向扭矩波动的建议策略
Cuk转换器可以用于为BLDCM供电,因为它具有具有不同输出模式的两个不同的输出电压,并且可以通过改变转换器的输出模式来减小换向转矩波动。本文提出的换相转矩脉动减小策略的 框图如图1所示。6,其中控制单元包含改变Cuk转换器的输出模式,在正常导通周期期间Cuk转换器的电压控制,在换向周期期间的非换向相电流稳定策略以及检测模块的控制。改变Cuk转换器的输出模式的控制由设计的模式选择电路实现, 并且在换向周期期间改变输出模式以升高三相桥式逆变器的输入电压,然后满足换向周期的电压需求。Cuk转换器的电压控制通过在正常导通期间采用速度和电流双闭环控制策略来实现,可以调节变频器的输入电压以满足电机的速度调节。非换向相电流稳定策略用于保持非换向相电流稳定,然后减小换向转矩波动。在检测模块中,通过霍尔信号的改变触发换向的开始,并且当输出电流减小到零时,换向结束。Cuk转换器的电压控制通过在正常导通期间采用速度和电流双闭环控制策略来实现,其可以调节逆变器的输入电压以满足电动机的速度调节。非换向相电流稳定策略用于保持非换向相电流稳定,然后减小换向转矩波动。在检测模块中,通过霍尔信号的改变触发换向的开始,并且当流出电流减小到零时换向结束。Cuk转换器的电压控制通过在正常导通期间采用速度和电流双闭环控制策略来实现,可以调节变频器的输入电压以满足电机的速度调节。非换向相电流稳定策略用于保持非换向相电流稳定,然后减小换向转矩波动。在检测模块中,通过霍尔信号的改变触发换向的开始,并且当输出电流减小到零时,换向结束。非换向相电流稳定策略用于保持非换向相电流稳定,然后减小换向转矩波动。在检测模块中,通过霍尔信号的改变触发换向的开始,并且当流出电流减小到零时换向结束。非换向相电流稳定策略用于保持非换向相电流稳定,然后减小换向转矩波动。在检测模块中,通过霍尔信号的改变触发换向的开始,并且当流出电流减小到零时换向结束。
如图1所示。 如图7(b)所示,在换向期间,为了提高变频器的输入电压并保持非换向相电流稳定,Cuk转换器在MOSFET Tc导通的情况下以升压模式操作二极管D8截止。 同时,Cuk转换器通过MOSFET Tc和电源为BLDCM供电三相桥逆变器。 忽略电压降MOSFET和二极管,反相器Uin的输入电压为表示为(14)。
B.正常期间Cuk转换器的电压控制传导期电机速度调节的需求可以通过PWM斩波时逆变器的电源电压是常数,以 c-为例。 由第一和第三方程(1),两个导通相的线路电压在正常导通周期uac期间可以获得
在调制周期Ts内,相电流ic几乎为零不变,然后平均线电压两个导通阶段Uac派生为
其中dn是T1的占空比,由(16),我们有
与[16]中的方法相比,可以实现调速通过三相逆变器的PWM斩波恒定输入电压或Cuk转换器的PAM控制在本文中。 当采用PAM方法时,电压由三相逆变器中MOSFET的导通/关断引起的尖峰和由高频PWM斩波产生的电流纹波都减小,并且调制程序方法也进一步简化[25],[26]。在本文中,在正常导通期间,输入通过Cuk的PAM方法来调节逆变器的电压转换器在升压 - 升压模式而不是PWM斩波,即,(17)中的dn = 1。 在两相下传导模式具有六级换向,输入电压由下式给出
其中in是非换向电流。 由(13)和(18)在正常导通周期期间T7的占空比dc派生为
在正常导通期间,MOSFET Tc截止和Cuk转换器处于降压升压模式,详细控制方法见图1。 6.参考速度PI速度控制器n *由上位机给出由三个霍尔传感器计算的转子速度是反馈的速度控制器。 PI电流的参考电流控制器是速度控制器的输出和反馈的电流控制器是采样的非转换电流 In然后,可以实现逆变器的输入电压控制通过调节电流控制器的输出占空比dc。
C.非交换相电流稳定策略期间换向期为了减少换向转矩波动,MOSFET模式选择电路中的Tc导通,Cuk导通转换器在换向开始时以升压模式操作由霍尔信号的变化触发。 除了,在整个换向期间MOSFET T7的占空比周期是在之前的先前调制周期中的周期换向。 如图1所示。如图7(b)所示,逆变器表示为
由于Udcge;2E 2R | in | (Udc为额定电压)时BLDCM工作在额定工作条件下,关系Uinge;4E 3R | in | 可以在换向期间满足基于(20)的周期。 换句话说,输出电压的Cuk转换器在升压模式下的功率大于所需的变频器输入电压。 根据(8)和(20),以保持非换向相电流稳定,占空比的MOSFET应用于非交换相换向周期推导为
当流出电流减小到零时,换向结束并且MOSFET Tc截止;同时,恢复正常传导时段的控制策略。图8示出了所提出的换向的调制方法转矩脉动减小策略。正常时导通周期,MOSFET Tc关断,Cuk转换器处于降压 - 升压模式。变频器的输入电压为通过采用速度和电流闭环控制策略,可以实现电机的速度调节无需变频器的PWM斩波。换向期间周期,MOSFET Tc导通,Cuk转换器在升压模式。变频器的输入电压可以满足电压交换期的需求,以及非交换的通过调节MOSFET的占空比可以使电流保持稳定应用于非换向阶段。当输出电流减小到零,换向结束MOSFET Tc截止,同时,控制策略恢复正常导通时段。
V.实施和实验结果
图1所示的实验原型。
9被构建为验证理论的正确性和有效性提出的方法。在原型中,核心处理器是TMS320F28335生产的由TI公司与150MHz时钟频率,MOSFET是国际整流器公司生产的IRFB4030PbF。此外,两个电流传感器用于测量相电流ia和ib。 BLDCM的基本参数和Cuk转换器列于表1。实验原型由Agilent提供N5767A直流电源。记录实验结果带有逻辑探头PBL100的数字示波器DLM2024获取三相桥式逆变器的开关信号,Cuk转换器的驱动信号T7,以及切换模式选择电路
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137184],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

