英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
控制器硬件 - 在环路模拟设计具有能量存储的燃料电池车辆的电力管理策略
余余杭,惠利,Simon Foo
电气及计算机工程系
FAMU-FSU工学院,塔拉哈西,FL 32310
yuhang@caps.fsu.edu
摘要:设计具有储能(ES)电源管理策略的燃料电池车辆(FCV)的数字控制系统可能是昂贵且耗时的。在本文中,控制器硬件在环(CHIL)模拟用于使用实时数字模拟器(RTDS)为具有ES的FCV系统设计电源管理策略。CHIL模拟是用于FCV的数字控制器设计的快速,低成本原型和测试方法。这个想法是用一个真正的硬件控制器代替模拟控制系统,该控制器与在RTDS上模拟的系统的其余部分进行交互。特别是针对具有ES的FCV系统开发了两种电源管理策略。FCV动力传动系实时模拟和模拟RTDS。使用硬件控制器数字信号处理器(DSP)实现电源管理策略。CHIL仿真波形与纯软件仿真波形一致。实验结果表明,使用RTDS的CHIL提供了一种快速,安全可靠的方法来设计和测试具有ES的FCV功率管理策略。
关键词:控制器硬件在环; 燃料电池车;储能; 电源管理策略
第一节:介绍
设计具有能量存储(ES)电力管理策略的燃料电池(FC)车辆(FCV)的数字控制系统可能是昂贵且耗时的。对于FCV系统中的非线性电机驱动负载,采样频率和时间延迟是数字控制器的两个关键参数,可以使系统不稳定。控制器硬件在环(CHIL)模拟是用于FCV的数字控制器设计的快速,低成本的原型和测试方法。CHIL仿真用实际硬件控制器替代了仿真控制系统,该控制器与模拟器上仿真的其余系统进行实时交互。这种方法增加了仿真的真实性,并提供了对硬件特性的访问。因此,CHIL使新的控制算法的测试快速,安全可靠[1] [2]。CHIL需要系统的其余部分在模拟器上实现实时性。目前,在实践模拟平台开发中正在学术界和行业进行广泛的研究[3] [4]。参考文献。[3],通过外部通信链路分离的PC电脑用于传输数据。参考文献。[4],仿真环境由虚拟测试台(VTB)及其实时扩展组成。但是由于这些平台的实时计算能力受限,仿真系统的复杂性受到限制。在本文中,提出了使用CHIL设计使用实时数字模拟器(RTDS)对具有ES的FCV系统的电源管理策略。针对具有ES的FCV系统开发了两种电源管理策略。FCV动力传动系实时模拟和模拟RTDS。使用硬件控制器数字信号处理器(DSP)实现电源管理策略。将CHIL仿真结果与纯软件仿真系统进行比较。实验结果表明,使用RTDS的CHIL提供了一种快速,安全可靠的方法来设计和测试具有ES的FCV的电源管理策略。
第二节:FCV动力传动系配置和电力管理策略
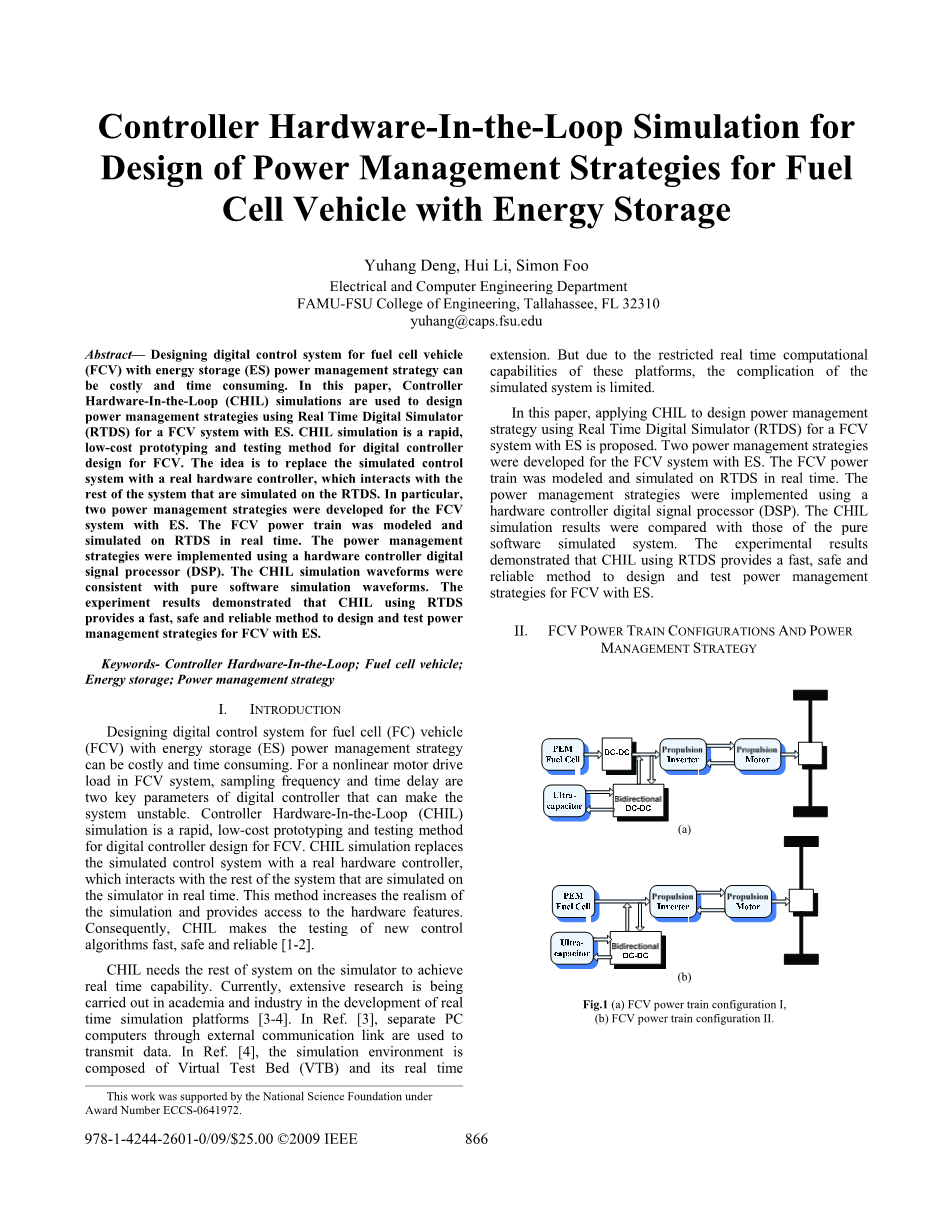
图。1(a)FCV动力传动系配置I,(b)FCV动力传动系配置II。
图2(a)动力传动系I的动力管理策略I,(b)动力传动系II的动力管理策略II
本文选择了两台FCV动力传动系统配置,如图1所示。1。具有高功率密度的ES(例如超级电容器(UC))被应用于该系统。三相双向dc-dc转换器连接到UC,以将UC的低电压电平升高到高直流母线电压,并控制UC与主动力传动系统之间的双向功率流。在动力传动系I中,FC连接到单向dc-dc转换器以提高电压。传动系II中直接连接到直流总线上使用高压FC单元。这种动力传动系已被用于丰田FCV。
为相应的动力传动系开发了两种电力管理策略,如图1所示。2。在两种控制策略中,FC被控制以提供负载功率和系统损耗的平均功率。FC平均功率流量控制通过将FC电流调节为期望值来实现。UC将通过控制所提出的三相双向dc-dc转换器的相移角来提供功率或吸收功率。在策略I中,FC电流控制通过调节连接到FC堆叠的升压转换器的输入电流来实现,并且通过控制双向dc-dc转换器的相移角来调节直流母线电压。在策略II中,通过调整双向dc-dc转换器的相移角来调节FC电流。
第三节:CHIL模拟设置和Rtds模型
A.引言模拟环境RTDS
实时数字模拟器(RTDS)是一款全数字电磁瞬态电源系统仿真器,可实时运行。模拟器通常被设计为实时模拟系统,时间步长大约为50 mu; 小号。该系统利用并行运行的多个数字信号处理器(DSP),并提供了许多数字和模拟I / O端口,用于将硬件与模拟进行接口连接。其实时功能允许用户将实际设备结合到闭环环境中的模拟中。模拟案例被构建,下载到模拟器,并使用定制软件套件RSCAD进行监控和控制。
B. CHIL仿真设置
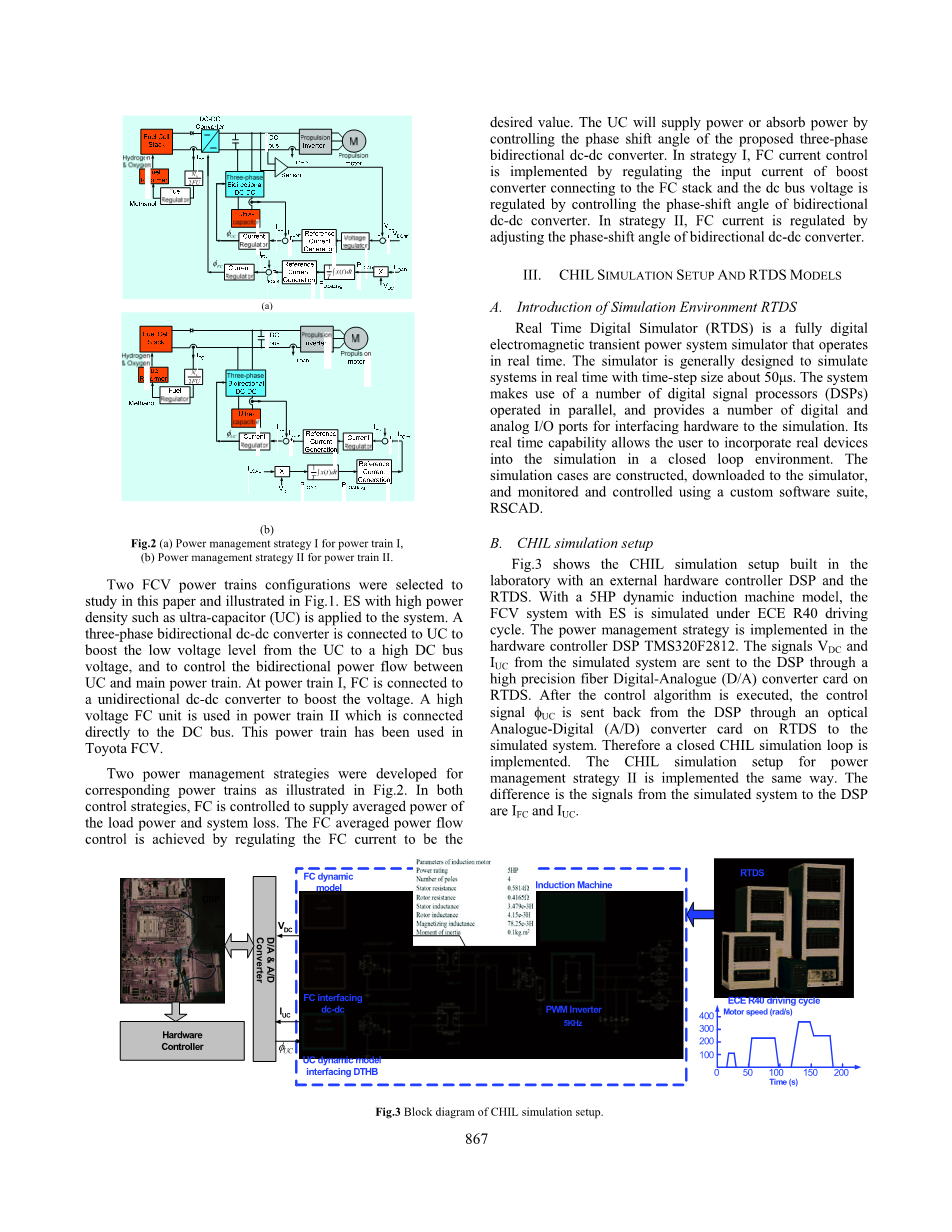
图3显示了使用外部硬件控制器DSP和RTDS实验室内置的CHIL仿真设置。采用5HP动态感应电动机模型,在ECE R40驱动循环下模拟具有ES的FCV系统。电源管理策略在硬件控制器DSP TMS320F2812中实现。信号VD C 和 一世U C从模拟系统通过RTDS上的高精度光纤数字模拟(D / A)转换卡发送到DSP。执行控制算法后,控制信号phi;U C通过RTDS上的光模拟数字(A / D)转换卡从DSP发回到仿真系统。因此,实现了封闭的CHIL仿真循环。电源管理策略II的CHIL仿真设置以相同的方式实现。区别在于从仿真系统到DSP的信号一世F C 和 一世U C。
图3 CHIL仿真设置框图
图4 采用FC改造模式和PEM FC动态模型
C. RTDS上的PEM FC系统动态模型
驱动周期中的PEM FC输出功率瞬态响应对于本应用研究至关重要。已经提出许多PEM FC模型来模拟燃料电池。但这些模型的基础是流体动力学,电化学反应,传热和热。这些模型不适合潮流研究应用。Tao et al。[5]提出了一个简单的PEM FC模型。然而,这种简单的模型缺乏燃料流量输入。燃料流量显着影响PEM FC的动态行为,因为响应负载电流的需求需要几十秒的时间。因此,在PEM FC模型中需要建立燃料流量与输出功率之间的关系。
在[6]中,El-Sharkh介绍了一个PEM FC模型。由于称为电荷双层的电极现象,由于增加了复杂性,该模型已被修改用于该应用。本研究开发的详细的PEM FC动态模型如图1所示。4。模型参数如附录I所示。在达到新的稳态值之前,燃料流动的动力学缓慢导致电压下降或上升。该电压下降或上升可以由诸如电池或超级电容器的次级ES补偿,并且将确定其容量。
D. RTDS的UC动态模型
UC具有比电池更高的功率密度,并且在驱动周期中UC输出动态响应影响整个系统的功率流动性能和效率。UC简单模型由大容量电容组成C0 和等效串联电阻 R0。然而,在FCV应用中,来自UC的输出功率在加速和减速期间经历快速且宽的变化。在各种操作条件下,这将需要更大的负载瞬变下电化学电容器的更准确的模型
图5 UC五阶动态模型。
图7中提出的电路[7] 。图5可以准确模拟UC的动态行为。它包括一个大电容电容C0,等效串联电阻 R0和五阶并行RC网络。参数如图1所示。图5。UC动态模型的验证通过模拟和实验分析得到批准[7]。
E. RTDS上的双向dc-dc转换器模型
在本研究中选择了一种软开关50KHz三相隔离双向dc-dc转换器,因为(1)由于较小的电流纹波导致的三相,(2)直流电容的减小导致的电流纹波减小,(3)由于较小的电感器导致更高的动态性,以及(4)由于较小的电流应力和软开关而使效率更高。该拓扑结构是图3所示的双三相双向dc-dc转换器(DTHB)。图6。功率流是双向的,由相移角控制phi;在低压侧和高压侧的有源桥之间。换向电感器Ls作为存储和传送电力的中间元件。
图6 双三相半桥双向dc-dc转换器(DTHB)
RTDS具有实时模拟电力电子转换器的子网络的能力,可以以较小的时间步长连接到主网络解决方案 〜2 mu; 小号。但是,建模的电力电子开关的允许开关频率限制在高达5 KHz。并且在这种情况下,模拟开关的软开关是无法实现的2 mu; 小号环境。因此,在RTDS上提出的DTHB转换器的小时间实时仿真不能反映硬件转换器的切换过程。在本文中,DTDB转换器的平均模型在RTDS上进行了模拟和时间分析50 mu; 小号。
让 C1= C2= CP,C3= C4= CS。作为占空比D =0.5,V1= V2= 0.5 Vd 和 V3= V4= 0.5 Vo将成立。 一世我ntilde;,Vd,Vo 被选为状态变量; Vb,Vs,phi; 被选为控制输入和 Vo 被选择为在升压模式下输出; V我ntilde;被选择以降压模式输出。DTHB转换器在任一方向的平均信号模型可以在(1)中表示如下。功率流可以用公式(2)计算。基于方程(1),得到平均电路模型,如图1所示。图7:
第四节:CHIL实验结果
首先在RTDS上使用纯软件模拟对包括控制系统在内的整个FCV系统进行模拟。然后在DSP TMS320F2812中实现了控制算法。其余的FCV系统在RTDS上进行了仿真。控制算法在DSP上执行,控制信号发送到RTDS上的FCV模型。CHIL实验装置如图1所示。3。CHIL实验波形和电源管理策略的纯软件仿真波形我在图 1中进行了比较。8。实验结果如图1所示。图8(a)与图1所示的纯软件仿真一致。图8(b)。电源管理策略II的实验波形也与图1所示的纯软件仿真波形一致。图9。因此,这些结果证实,提出的CHIL平台提供了一种快速,安全可靠的方法来设计具有ES的FCV电源管理策略。在控制策略I中观察到VD C的实验结果比纯软件模拟具有更多的尖峰。在控制策略二,一世F C的实验结果比纯软件模拟具有更多的尖峰。这些差异的根本之处在于硬件控制器和模拟器之间的接口中的时间延迟。
图。8电源管理策略的性能I(a)CHIL实验波形(b)纯软件仿真波形,(c)负载曲线
图。9电源管理策略的性能II(a)CHIL实验波形(b)纯软件仿真波形,(c)负载曲线
第五节:结论
在本文中,提出了一种使用RTDS和硬件控制器的新型CHIL仿真方法,研究了具有ES的FCV功率管理策略。本文使用RTDS实现CHIL的优点是:(1)RTDS利用并行运行的多个处理器,有助于实现复杂系统的快速准确仿真,如FCV系统,包括PEM FC,ES,与ES接口的DTHB dc-dc转换器,三相推进逆变器和感应电机; (2)RTDS提供了多个高精度,高速度A / D转换器和D / A转换器端口,允许用户将最小接口电路应用于CHIL,以避免由其他方法报告的复杂辅助电路产生的误差或延迟。实验结果证明了CHIL仿真方法在设计和测试FCV电源管理策略时的有效性。未来的工作包括建立DTHB转换器原型,并使用RTDS的电力硬件在环(PHIL)仿真研究电源管理控制。
附录
表I PEM FC动态模型参数
|
N 0 |
堆叠中的系列燃料电池的数量 |
tau;H - O |
氢氧流量比 |
qH 2我ntilde;[kmol / s] |
输入氢气的摩尔流量 |
|
qO 2我ntilde;[kmol / s] |
输入氧气的摩尔流量 |
Kr[kmol /(s A)] |
建模常数 |
KH 2[kmol /(s atm)] |
氢气阀摩尔常数 |
|
KO 2[kmol /(s atm)] |
氧气阀摩尔常数 |
KH 2 O[ a t m ]/(s atm)] |
水阀摩尔常数 |
tau;H 2[ s ] |
氢时间常数 |
|
tau;O 2[ s ] |
氧气时间常数 |
tau;H 2 O[ s ] |
水时间常数 |
E 0 [V] |
标准空载电压 |
|
R [(1atm)/(kmolK)] |
通用气体常数 |
pH 2[ a t m ] |
氢分压 |
pO 2[ a t m ] |
氧分压 |
|
pH 2 O[ a t m ] |
水分压 |
C d [F] |
充电双层电容器 |
Rint= Rr R一个[ Omega; ] |
堆叠的欧姆丢失 |
关键词
IEEE关键词
能源管理,燃料电池车辆,储能,电力系统管理,数字控制,实时系统,硬件,虚拟原型,系统测试,控制系统综合
INSPEC:受控索引
燃料电池车,控制器,储能
INSPEC:非控
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141882],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

