
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
在伺服控制加光滑和瞬态改善传输信号
摘要—
嵌入或附加的控制是现代精密系统的高性能控制积分。尽管有能力大大提高稳态性能,附加补偿可以引入输出不连续性和显着的瞬态响应。出于和附加控制设计的实际重要性的广泛应用,本文将探讨如何通过在信号一般光滑线性控制系统。我们解释了系统状态在插件伺服增强光滑输入存在跳跃,和推导公式的数学表征的非光滑性传输。结果,然后应用到设计快速的瞬态响应,在传统的选择附加设计的输入。的应用实例的制造控制系统进行,仿真和实验结果验证了开发的理论工具。
索引词-干扰抑制,非光滑输入,瞬时控制。
- 引言
插件或附加控制设计是控制工程中伺服增强的核心。为了提供在大规模的存储容量,一个现代的硬盘驱动器包含超过900 000 1数据轨道内的磁盘。相应地,每个磁道的宽度,称为轨道间距(TP),可以很容易地低于30纳米。在读/写操作,伺服控制必须保持一个跟踪误差低于10% TP,而强大的外部干扰可以诱导跟踪误差,大至70% TP。这样大的错误只能通过添加插件控制命令来减弱。另一个例子是,在高速晶片扫描半导体制造,[ 1 ]表明,在定位系统的强迫命令99.97%是插件的前馈控制的贡献。
在反馈算法,附加伺服中心是一大类的设计方案,需要一个基线反馈控制器。两个例子是:干扰观察员[ 2 ]和基于回路成形Youla参数化[ 3 ],[ 4 ]。无论是一般的低频增强[ 5 ]–[ 7 ],或为功能扩展研究结构的干扰–[ 8 ] [ 10 ],扰动观测器通常更新命令在输入侧的植物。Youla参数化可以参数化或作为一个附加补偿在工厂输入侧[ 11 ],[ 12 ],或在工厂的输入和控制器输入的联合补偿[ 13 ],[ 14 ]。在前馈相关控制,自适应或基于传感器的前馈补偿[ 15 ] - [ 17 ]可以被配置为附加算法,无论是在工厂输入或参考输入(见第三节的更多细节)。
从根本上说,附加控制带来伺服增强引入闭环信号的新的动态特性。这样一个过程产生的信号的非光滑性一定程度。为满足未来系统的高精度要求,了解它是什么类型的系统和附加的变化创造了大的瞬态必不可少的,什么是光滑和暂态信号之间的数学关系。这种考虑的重要性进行了验证,在模拟和实验[ 18 ]和[ 19 ],比较了在不同的前馈控制算法的瞬态性能。然而,一个完整的理论解决问题的本质上是平凡的,除了简单的不连续性,如步骤和斜坡信号。尽管丰富的文献设计,以达到所需的稳态性能,稀疏调查的瞬态补偿附加,并充分理解的理论附加瞬态仍然下落不明。本文旨在弥合这一差距,重点是双重的。首先,我们开发的理论结果,输入和输出的不连续性,并揭示其实际意义,在控制设计中的瞬态性能。第二,新的调查,检查在不同的附加控制设计的瞬态特性。我们推导出一个确切的数学公式计算系统输出的变化时,输入和/或其衍生物具有不连续性,并提供相关的瞬态响应的计算。一个中心的结果,我们得到的是,共同的选择进行附加控制的输入侧的植物产生不希望的长的瞬变,如果有在转向补偿延迟。该问题的解决方案进行了详细讨论,并验证了精密运动控制平台,在半导体制造。
本文的其余部分安排如下:第二部分描述是对算法进行验证的晶圆扫描仪硬件。第三节揭示了暂态问题,在附加补偿,第四节和第五部分解决的数学问题。仿真和实验结果中所提供的第六节。第七章总结本文验证算法的执行。第三节揭示了附加补偿中的暂态问题,其中第四节和第五节解决了数学问题,仿真和实验结果在第六节中给出。
假设:所有等级和信号与系统是因果值系数。L{·}和Lminus;1{·}拉普拉斯算子分别,与逆拉普拉斯转换。实际用途的,我们专门种金跳信号及其衍生物;得到u(t 0 )和u(tminus;0 ),,分别,左手信号u(t)在f (i)(t)迪di f (t)/dti,广义一阶导数的函数f(t)。f (t)阶在T0中断,如果y(k)(t 0 ) _= y(k)(tminus;
0 )-换句话说,f(t)是(导数)类Ckminus;而不是Ckminus;在T0。[Gd→y]d 时间域输出of 输入闭环系统考虑f植物以及传递函数P,和控制器(in a负反馈环)(C,T _ PC/(1 PC)denotes互补灵敏度函数(传递函数f植物输出);S _ 1/(1 PC)是灵敏度函数。输出扰动植物输出。
备注1:我们专注于分析和控制的瞬态行为,并假设输入属性的不连续变化不产生系统不稳定(可以保证,例如,一个足够长的停留时间在切换[ 20 ])。有关这种切换系统的稳定性的其他信息,我们参考读者[ 21 ] - [ 24 ]。
二、硬件描述和标记
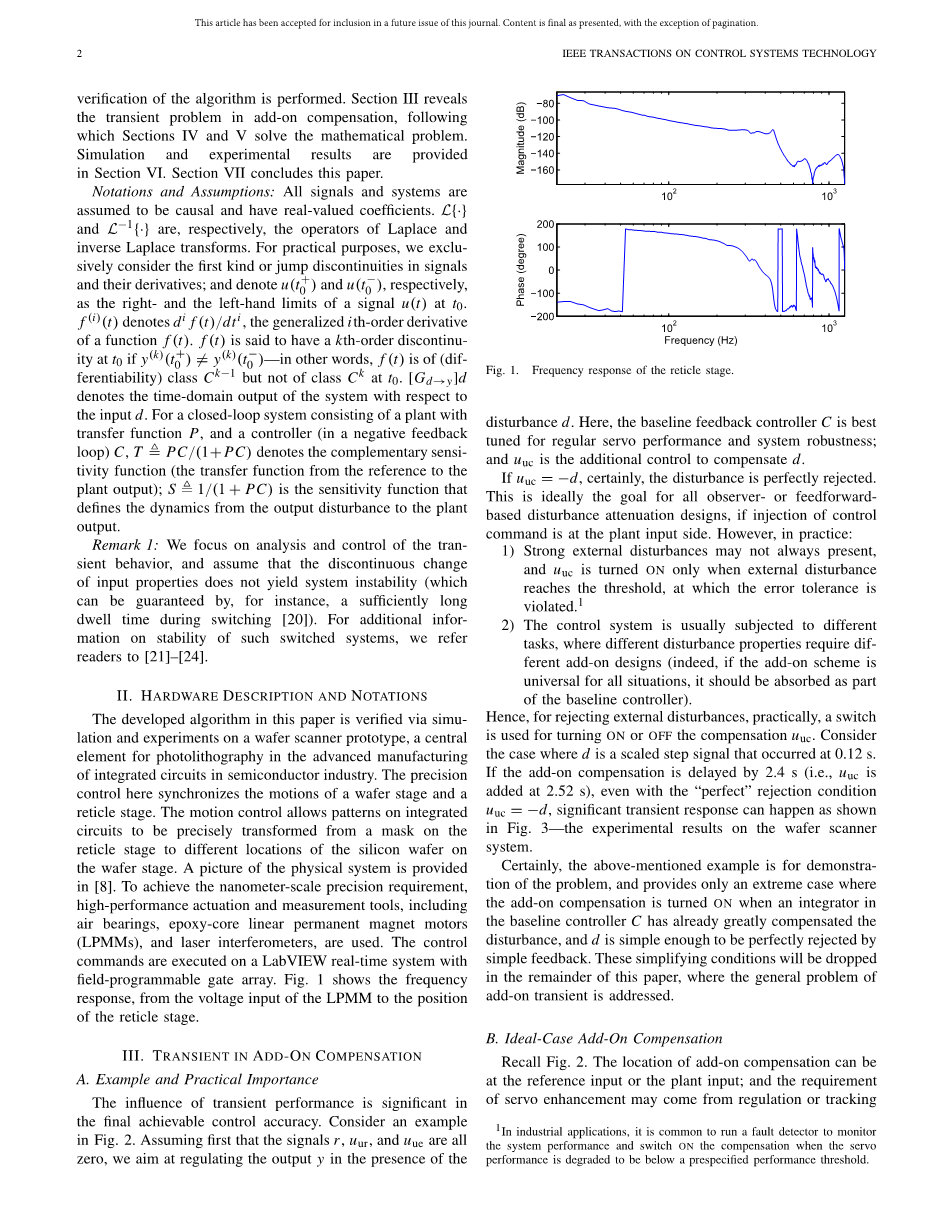
在开发的算法是通过模拟验证了本论文中的实验和在晶圆扫描仪的原型,中央元素的照片光刻技术在先进制造业中的半导体集成电路。在这里您的精密运动控制晶片和光罩阶段一个阶段。运动控制允许对集成电路的精确模式的转变从一个光罩面具在不同的地点,一个硅晶片晶圆阶段。物理系统的照片是提供在[ 8 ]。对实现纳米尺度精度的要求,高性能驱动和测量工具,包括空气轴承,线性环氧核心永磁电机(lpmms),和激光干涉仪,是用来。控制命令是执行,在LabVIEW实时系统与现场可编程门阵列。图1显示的频率响应,从本地的电压输入到光罩阶段的位置。
三、瞬态附加补偿
A、例子和实际重要性
瞬态性能的影响是显着的,在最终实现的控制精度。考虑图2中的一个例子。假设第一,信号和都是零,我们的目标是调节输出Y在扰动D.这里的存在,基线反馈控制器C最好调整为普通伺服性能和系统的鲁棒性;与是补偿D.附加控制。
如果,当然,干扰是完全拒绝。这是理想的所有目标或基于观测器的扰动抑制设计前馈控制命令,如果注射是在工厂输入侧。然而,在实践中:
1)强大的外部干扰可能并不总是存在的,和UUC打开只有当外部干扰达到阈值,在错误容忍的侵犯。
2)控制系统通常受到不同的任务,在不同的干扰特性需要不同的附加设计(实际上,如果附加方案是通用的所有情况下,它应该被吸收的一部分,基线控制器)。
因此,拒绝外部干扰,实际上,一个开关用于打开或关闭补偿UUC。考虑的情况下,D是一个规模的阶跃信号在0.12秒发生如果附加补偿延迟2.4 s(即,UUC添加在2.52 s),甚至用“完美”的排斥条件,重要的瞬态响应可以如图3.实验结果显示晶片扫描系统发生。
当然,上述的例子是对问题的论证,并仅提供了一个极端的情况下,附加补偿开启时,在基线控制器C积分已经大大补偿的干扰,和D是很简单的,简单的反馈完全拒绝。这些简化的条件将被丢弃在本文的其余部分,附加瞬态的一般问题。
B、理想情况下的附加补偿
回忆图2。附加补偿的位置可以击败参考输入或植物输入,和伺服增强的要求可能来自调节或跟踪控制。这些额外的考虑现在添加到形成一个通用的框图与不同配置的附加信号。我们现在正式介绍信号UUR,UUE,和英美加,这是加伺服增强信号更新的参考(UR),更新的错误(UE)、更新(UC),分别控制。
让G(S)从附加控制到工厂输出的闭环传递函数。假设零初始条件在t = 0,即和第一个重点衰减扰动D,即,我们的目标是实现
在是,或;的传递函数,从D到Y,从图2中,G = P /(1 PC)在UC。在UE,你的,uaddminus;和y都等于补灵敏度函数之间的动态关系,即G = T = PC /(1 PC)。因此,无论在设计方法,满足(1),在UC和你的/ UE的理想条件,分别和
C、短暂的理想加入UC控制
不失一般性,假设实际干扰d如图4所示的顶部的次要情节,在时间t0,插件伺服增强接通。理想的情况下,UC命令UUC是图4中的第二条实线,完全取消干扰后时间t0。
让
考虑G的反应(S)的组合输入 。直接求解相关的常微分方程(ODE)是不可行的衍生物的U没有很好地定义在时间T0。我们将展示如何输入不连续在Y(T)及其衍生物产生突然的变化。注意,与阶跃响应的不连续性不同,这个输入输出间断问题的解是非平凡的。
对于一般的系统,我们接下来得到确切的数学图4中的u = T0的瞬态结果。召回(2)注意,u(t)为零forall;T T0图4。瞬态响应y(t)在Tisin;(T0,infin;)满足
与初始条件:即瞬态与初始条件
可以使用拉普拉斯变换或直接计算演算的常微分方程的解决方案。它是,但是,认识到初始条件不等于,即实际瞬态并不简单地等于自然的瞬态响应下-系统状态对附加补偿前应用(回忆的例子,图3)。这是由于你输入的不连续性跳到你(我)在图4中。接下来,我们获得基于和G(s)的动态,然后分析产生的瞬态性能。
四、连续输入输出
定理2:让u(t)和Y(t)作为有限维实系数线性系统G的输入和输出,满足
在时间T0。如果u(t)和/或其衍生物具有不连续性:
然后Y(t)和/或其衍生物包含不连续性,满足
定理2完全描述输入输出中断。左边的是非奇异矩阵(5)。因此,获得他们独特的解决方案存在,我不知道U(t)是除了在T0中断的情况。更具体地说,解决方案,我的价值观,可以通过以下方式获得矩阵求等式后向前替代
备注3:方程(5)可提供高达的(Nminus;1)阶输出中断。如果他们的,N是兴趣,定理2可用于增强系统的类似的程序可以提供其他高阶不连续性。
数值验证:考虑一阶系统阶跃响应的斜坡
在这个例子中,我们有
卷积或逆拉普拉斯分析给出如果;如果;˙如果 ; ,如果;如果 ;和如果 。然后
即一级输入输出不连续不连续造成的
或者,将定理2和注释3应用于同一系统。注意到G(s)= 1 /(S A)= S /(S2 AS),我们有
因此和
结果与(8)中的匹配。更重要的是,这里的计算删除的必要性来计算的全时域的解决方案,这不仅是长和复杂的高阶系统,但也不可行的一般信号没有给定的时域模型。
A、证明与分析
首先介绍了连续信号利用狄拉克delta;函数的表示。在文本的其余部分,我们将使用mu;(t)表示单位阶跃信号,即mu;(t)= 1forall;Tge;0和mu;(t)= 0forall;T<0;并表示delta;(t)为狄三角函数满足T0delta;(tau;)Dtau;=mu;(T)和infin;0delta;(tau;minus;T)G(tau;)Dtau;= G(t)若G(t)是连续的。作为一个分布(a.k.a.gener化功能),delta;(t)满足Dmu;(T)/ dt =delta;(t)
考虑一个分段连续函数g(t)在T0其中/间断。我们可以写
F0(t)是连续在T0;例如,及
mu;(Tminus;T0)创建在t = t0的间断,如图所
在图5中的例子中
同样,如果F˙0(T)更是连续在T0,我们˙0 F(T)=如1mu;(Tminus;T0) F1(T),f1(t)是连续的T0。因此(9)的导数必须满足
在如给出了一阶不连
进一步分化产生
凡F2,。..FN是连续的,在T0、和非光滑性
G(t)的特点是
方程(9)-(11)可以紧凑地写为
矩阵向量运算的形式(13),下面的结果将是有用的:
事实四:以下是真的:
我们现在正式证明定理2。
证明:更换,和,分别在(13);和应用所得的方程 这个向量形式(4)-给<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137843],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

