
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
基于移动激光扫描点云的3D街景路面半自动提取
摘要:道路三维信息提取的准确性对于很多应用来说是很重要的,如道路养护和虚拟3D 建模等。移动激光扫描(MLS)是一种用来捕捉密集点云的有效技术,可用于构建大面积的具体的道路模型。所以本文提出一种方法,从大规模的MLS点云中提取和描述道路。该方法把MLS点云分成为多组连续的“扫描行”,每组由一个道路横截面组成。移动窗口操作是基于路缘图案来检测地面点,并且逐行的过滤掉非地面点的操作。检测到的路面点被跟踪和改进,这使得它们在全局一致和局部相似。为了评价该方法的有效性, Optech的Lynx移动制图系统会捕获两种类型的街景点云来实验,实验结果表明这一方法提取出道路的质量,完整性和正确性超过94.42%,91.13%,和91.3%,这证明了该方法是一种很有前途的从MLS点云中提取三维道路的方法。
- 引言
摄影测量、遥感、计算机等行业都关注于从各种地理空间数据中半自动和自动提取道路。在遥感中,已经研究了各种方法从遥感图像中提取道路,如边缘检测、纹理分析(Ferchichi和Wang 2005;Wan等,2007),几何形变建模 (Laptev 等, 2000; Niu, 2006;Peng 等,2008),仪器分析(Zhang 等,2001;Barsi Heipke,2003),和随机几何建模 (Brazohar 和Cooper,1996; Lacoste 等,2005,2010;Lafarge 等,2010)。在以农村环境为背景的实验中,这些方法达到了他们在道路提取中的最佳结果,颜色和强度在道路区域内是相对独特和一致的。然而,从较密集的城市的高分辨率图像中自动提取道路就很困难了,因为有建筑阴影,树木,和移动对象等的影响,这些降低了道路提取的可靠性和完整性(胡等,2004)。
近几年来,激光扫描技术的进步导致激光扫描仪,导航传感器(通常包括全球导航卫星系统和惯性测量单元),其他(如数据采集传感器、数码相机)和移动映射平台合成为一体(Barber等,2008)。移动激光扫描(MLS)已成为一个用于在大区域内捕获非常密集的点云的有效方案。Haala 等(2008)和Barber等(2008)研究了StreetM-apper从汽车上搭载的MLS系统中收集激光扫描点云这一方法的精度和准确度,并发现了能够有效拍摄城市的技术。Kaartinen 等(2012)使用永久测试研究了各种基于MLS系统商用或研究的系统的性能。结果显示,好的定位测量条件下可以生成高质量的点云。格雷厄姆(2010)概述了最近的MLS技术。要想有效地从点云提取感兴趣的3 D街景对象,MLS硬件的进步,相比于MLS软件和自动化算法来说,相对较慢。这是因为在城市街景中,捕获的点云包含各种类型的对象,如行人、汽车、建筑物和道路。所以,因为各种物体的遮挡,捕获的点云中会有一些漏洞。尽管有许多关于点云的研究,如立面和建筑提取(Dold和Brenner,2006;Rutzinger 等,2009),极点提取(Brenner,2009;Lehtomaki 等,2010),路标提取并分类(Munoz等,2008;杨等,2012 b),但点云的研究还在发展早期阶段(杨等,2012 b)。
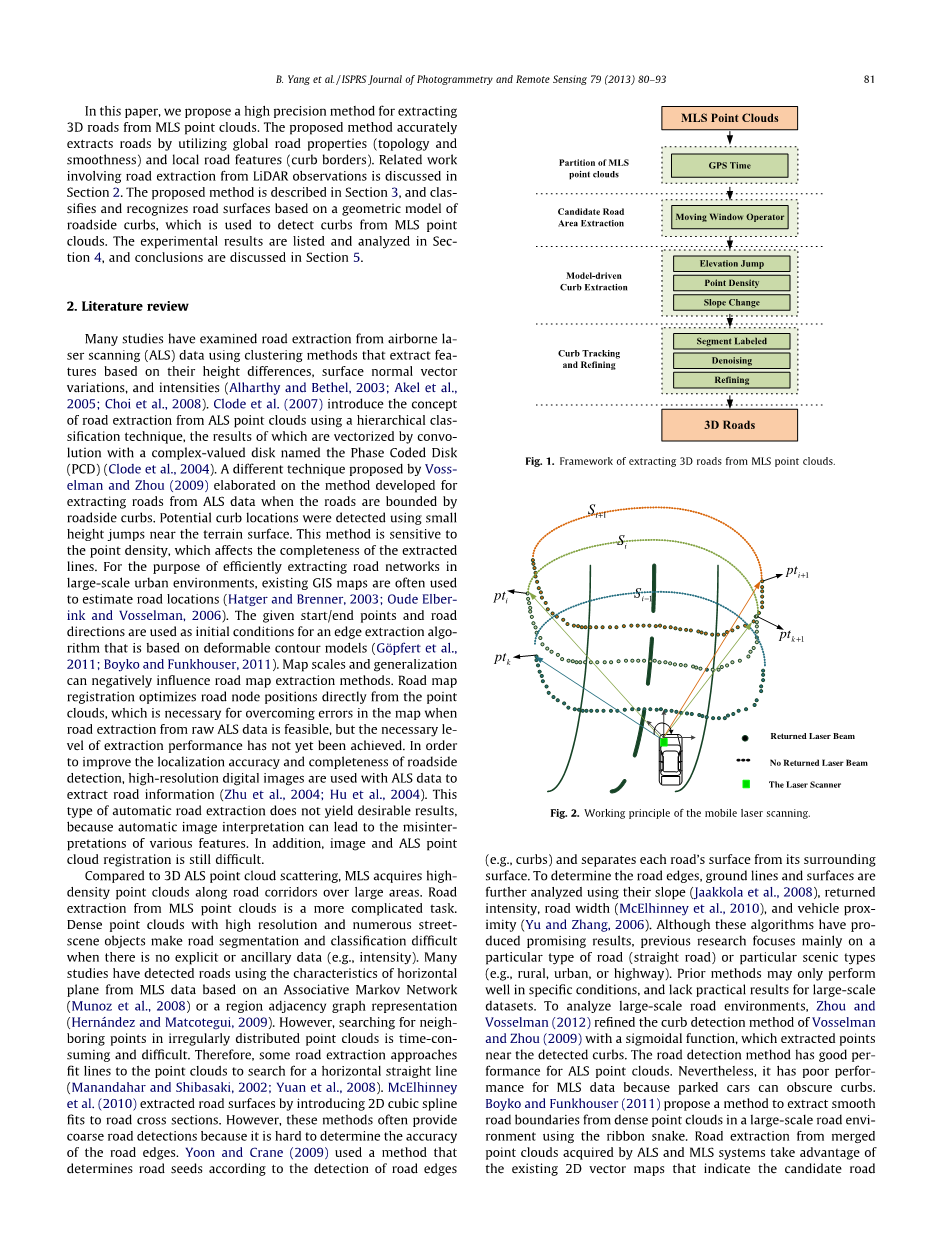
在本文中,我们提出一种高精度的从MLS点云中提取三维道路的方法。该方法利用全球道路的属性(拓扑和平滑度)和提取地方道路的特性(抑制边界)准确地提取道路。道路提取中涉及的相关激光雷达观测工作是在第二节讨论。第三节中描述基于几何模型分类和识别路面信息的方法。第四节列出了实验结果和分析,第五部分进行讨论并提出结论。
- 文献综述
从机载激光扫描(ALS)数据中提取道路的研究大多使用基于其高度差异,表面法向矢量变化和强度提取特征的聚类方法(Alharthy和Bethel,2003; Akel等,2005; Choi等,2008)。Clode等(2007)利用层次分类技术从ALS点云中引入了道路提取的概念,其结果与名为相位编码盘(PCD)的复值盘进行卷积(Clode等,2004)。Vosselman和Zhou(2009)提出了一种不同的技术,阐述了当道路被路边建筑物遮挡时从ALS数据中提取道路的方法。这是一种使用附近地形表面的高度差检测潜在的路缘位置的方法,这个方法对点的密度比较敏感,对提取的完整性有很大影响。为了有效地在大型城市环境中提取道路,现有的GIS地图通常用于估计道路位置(Hatger和Brenner,2003; Oude Elberink和Vosselman,2006)。给定的开始/结束点和道路方向是可变型模型的边缘提取算法的初始条件(Gouml;pfert等,2011;Boyko和Funkhouser,2011)。地图的比例尺可能会对路线提取方法产生负面影响。道路检测可以直接从点云优化的路段开始,这避免了地图的错误对从原始ALS数据中提取路线的影响,但这种提取方法的水平还比较低。为提高路缘检测的定位准确性和完整性,研究者采用高分辨率数字图像与ALS数据一起提取道路信息的方法(Zhu 等,2004; Hu 等,2004)。但这种自动道路提取的方法不能产生理想的结果,因为自动的图像解译会导致各种特征的判断失误。此外,图像和ALS点云检测仍然很困难。
与3D ALS点云散射相比,MLS在大面积的道路上能获得更高密度的点云。从MLS点云中提取道路是一项比较复杂的任务。当没有明确的辅助数据(例如,强度)时,高分辨率的图像和具有许多街景对象的密集点云使得路段分割和分类非常困难。许多研究已经使用基于Associative Markov网络(Munoz等,2008)或区域邻接图(Hernaacute;ndez和Matcotegui,2009)来表示MLS数据的水平面特征的方法来检测道路。然而,在不规则分布的点云中寻找相邻点是耗时且困难的。因此,在点云中搜索水平直线适合于一些道路提取方法(Manandahar和Shibasaki,2002; Yuan等,2008)。( McElhinneyet等,2010)通过引入二维三次样条拟合道路横截面来提取路面。然而,这些方法通常提供的道路检测比较粗糙,因为难以确定道路边缘的准确性。 Yoon和Crane(2009)使用一种方法来确定道路与路边(例如路缘)的检测,并将每条道路的表面与其周围的表面分开。为了确定道路边缘,使用其坡度(Jaakkola等,2008),道路宽度(McElhinney 等,2010)和车辆邻近度等特征进一步分析了路边和路面的差异(Yu和Zhang,2006)。虽然这些算法产生了有希望的结果,但以前的研究主要集中在道路(直路)或特定风景类型上(例如农村,城市或高速公路)。先前的方法只能在特定条件下表现良好,并且对于大规模的数据集缺乏实际的结果。为了分析大规模的道路环境,Zhou和Vosselman(2012)以Sigmoidal函数对Vosselman和Zhou(2009)的路缘检测方法进行了改进,提取了检测到的路缘附近的点。道路检测方法对ALS点云具有良好的性能。然而,由于停放的汽车可能掩盖路缘石,MLS数据的性能较差。 Boyko和Funkhouser(2011)提出了一种在大型路面环境中从密集的点云中提取平滑路面边界的方法。利用现有的2D向量图,由ALS和MLS系统的合并点云获得的道路提取,指出了候选道路区域,其涉及效率和准确度之间的改进。使用额外的信息源(例如,GIS数据)改进了建模过程,特别是在速度方面。然而,这使得模型对次级数据库的准确性更敏感。
在本次研究中,我们提出了一种高效准确地从MLS点云提取3D道路的算法。为了更有效地处理大面积的点云,提出了一种新的点分割技术,根据GPS时间点将点云划分为连续的道路横截面。候选道路区域按横截面进行排序,以便使用移动窗口操作符进一步进行路缘检测。在每个道路横截面中,使用三种流行的路缘图案来检测路缘,这些路线模式考虑到高程差,点密度和坡度变化。最后,使用精密的路缘石提取3D路面。与以前的方法相比,所提出的方法可以与大规模点云一起使用,而不需要二次数据集(例如,图像,GIS数据集)或点云颜色或强度数据。此外,所提出的方法能够有效地处理多种类型的道路环境,包括规则和不规则的道路形状,这对城市环境的建模至关重要。
3.3D道路检测
本文提出的方法重点是使用道路的全局属性(例如拓扑和平滑度)和点云的局部形状特征来检测和跟踪MLS点云的路缘作为3D道路边界。所提出的方法的框架如图1所示。该方法包括四个关键步骤:
- 根据GPS时间点将点云划分为道路横截面;
- 使用移动窗口操作符提取候选路面区域;
- 通过几何分析局部点来检测路边点;
- 跟踪和完善具有全局一致性和局部形状相似性的路缘。
图1. 从MLS点云提取3D道路的框架图
3.1 MLS点云分区
MLS点云包含大量的点数,因此从点云中提取道路是耗时且复杂的。为了减少点数和计算时间,Boyko和Funkhouser(2011)根据检测矢量路线图提取了大致路面,Pu等(2011)根据车辆轨迹数据实现道路提取。虽然检测矢量路线图和车辆轨迹数据为从MLS点云中提取近似路面提供了可行的解决方案,但这种二次数据可能并不可用。此外,使用这些方法分割的瓦片与道路交叉点的区域重叠,导致在相邻补片处连接道路边界很困难。我们的目标是将MLS点云分割成连续的道路横截面。根据MLS的工作原理,激光扫描仪由高精度定时器触发,并以固定频率旋转。使用独特的时间标记顺序记录从脉冲回波中提取的点。假设所有激光脉冲返回到激光扫描仪,两个连续的激光印迹之间的时间间隔大致相同。然而,从上视图(天空)将返回很少的激光脉冲,从而导致两个连续记录的激光器印迹之间的时间间隔跳跃,pti和pti 1,如图2。
图2. 移动激光扫描的工作原理
如果连续点pti和pti 1之间的时间差大于阈值T,则两个连续点被认为是连续的第i和第i 1道路横截面的断点。通过用于指示激光印迹不连续点的断点,MLS点云可以使用以下等式被划分成一组顺序路段:
pti 1(t_gps) -pti(t_gps)gt;Tmax (1)
其中Tmax=50*Delta;t和Delta;t是连续激光印迹的恒定时间间隔。
图3显示了根据激光足迹和MLS点云的时间间隔,每二十路截面的MLS点云的分割结果。在图3b中每种颜色表示单独的道路横截面。
图3. 将MLS点云划分为道路横截面
图3显示了所提出的方法将MLS点云划分为一组顺序道路横截面。分区方法具有以下几个优点:(1)无需辅助数据(例如轨迹数据)的支持,可以轻松分割MLS点云;(2)每个分段道路横断面保持道路等特性,如路边点;和(3)每个分段道路横断面有少量点,并且很容易处理进一步的道路提取。
3.2候选道路的提取
根据3.1节中描述的程序,将MLS点云划分为道路横截面。每个道路横截面可以从建筑物,汽车,行人和极点获得点数。通常,与传感器不同距离的物体可以在单个扫描线中。图3b显示了建筑物和道路的点分布之间的差异。要从横截面中提取候选路面积,应将非地面点过滤掉。一般来说,道路上的地面点与道路上的非地面点几乎相同,非地面点的高程高于地面点的高程。因此,基于非地面点和地面之间高程差异,使用1-D线路滤波进行非地面点的滤波。为了完全过滤掉非地面点,我们实施了一个移动窗口操作符,搜索道路横截面上的点的高程差。移动窗口过滤操作器具有三个相邻的窗口,其沿着每个道路横截面从外边缘向中间边缘滑动,如图4所示。三个相邻窗口中的过滤操作符如下:
其中,Delta;Z1=max(Zi)-min(Zi)(i=1:3)是每个窗口的最大高程差,Delta;hpavement是路面最大高程差的阈值,Delta;hfilter是路面对地面的相对距离。 Delta;hpavement意味着窗口2和窗口3中的点适合水平线段。 每个窗口的长度由位于窗口中的点数(n)决定。 经验上,n超过20。
图4.沿着道路横截面移动窗口进行滤波操作
用移动窗口操作滤波后的结果如图1所示。图5(a)显示原始点云。如图5(b)所示,候选道路点以灰色绘制,边界点以红色明确绘制。非地面点以绿色绘制。看来,非地面点(例如建筑物,树木和汽车)被标记得很好,地面点保存得很好。
图5.非地面点滤波
3.3模型驱动路缘提取
为了从地面点提取道路,需要检测路面和路面分开的路边点。路边是道路和路面/绿化带之间的相邻区域。路缘被视为道路边界。一般来说,路缘石有三种主要类型,如图1所示。图6显示了路边处有一个高程和斜(红色点)。检测确定后,可以识别路边。I型表示边界平坦的道路,在道路和路边表面之间只有一个小的高度跳跃。 II型路缘石显示道路与路缘曲面之间的渐变高度变化。路面与公路边界附近有曲率的道路与道路之间出现III型路缘石。
图6.三种普通的路缘类型
为了找到路边位置,我们使用三个指标分析了每个道路横断面点的特征:高程差,点密度和坡度变化。从每个道路横截面的中间到外边缘,设计了两条相邻的移动窗口,沿着候选道路横截面逐点滑动一定长度的相邻移动窗口,如图7所示。每个窗口中的点数相同。我们计算出每个窗口中的高程差,点密度和斜率变化。 通过为要分类为路缘石的一组点和根据
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26696],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

