
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
GPS精密点定位方法的潜力位移监测:案例研究
Cemal Ozer Yigita,uArr;, M. Zeki Coskun b, Hakan Yavasoglu b, Abdullah Arslan b, Yunus Kalkan
摘要:相对/网络GPS / GNSS(全球定位系统/全球导航卫星系统)定位已广泛用于精确测量结构和地壳变形监测比二十年前。近年来,PPP(精确点定位)方法的兴趣有所增加由于其能够产生与相对GPS / GNSS定位一样准确的定位解决方案。该本文的主要目的是调查点位移的PPP方法的有效性和性能监测考虑长时间(24小时,12小时,6小时,3小时)观察期。为此,就是这样开发了高精度位移模拟装置,能够精确地在一个小的范围内完成在一个方向和水平面上的距离。十个模拟位移运动测试(2,3,6,11,15,21,30,40,50和60 mm)。十一个24小时GPS数据集,收集了10个模拟位移病例。每日数据集分为12 h,6 h和3小时子集,以调查数据长度对估计位移的影响。所有数据集通过PPP方法和相对GPS方法进行处理。然后,PPP估计和相对GPS-将估计的位移与实际位移进行比较,并且统计显着性测试,形成为使用这两种方法可以检测哪个位移量。结果表明基于24小时观察期的PPP方法可以确定高达1.5厘米的水平位移。
1.引言
在过去二十年里,GNSS定位技术已经有了被广泛应用于水平和垂直位移监测 - 滑坡等工程结构[1-3][4,5]和地震[6-8]。点位移监测
GNSS通常使用重复的运动或连续操作。通常携带GNSS的重复运动
用于缓慢变形监测应用,如构造断层,山体滑坡,沉陷,火山等一些工程结构(即大坝,大型建筑物),而连续监测 - 通常采用GNSS进行高频变形 - 监控应用,如塔楼,高层建筑,长跨桥,地震学。虽然GNSS测量 - 静态模式可以达到毫米级的准确度长时间观察(通常为24小时),其精度降低观察时间较短,由于卫星星座 - 位置几何和多径误差在场地的影响[9,4]。到目前为止,对于变形的监测,其中的程度所需的精度是毫米,相对GNSS方法要求将观察结果从最少两个组合起来GNSS接收机,至少有一个占用已知站坐标和外部区域的主动变形,已经用于重复测量。近年来有兴趣增加PPP [10,11]方法,这是一个强大的定位方法的目的是处理来自待机的测量,单独的GNSS接收机来计算高精度位置。 PPP是成为实现厘米级的成本效益的技术精度[12]。 PPP已经被证明是一个强大的方法对于许多应用[13],如地壳变形监测[14,15],地震波运动监测[16-18],结构健康
监测应用[19,20],GNSS浮标[21],精确轨道确定低地球轨道卫星[22]和精确移动物体在陆地,空中和海洋中的定位[23-26]。本文评估了PPP方法的潜力相对/网络GPS(以下简称为相对)基于IGS(国际GNSS)十二分的方法服务)网点用于点位移监测应用在模拟位移运动试验的基础上。将每个运动试验中的PPP估计和相对估计的位移与相应的实际残差进行比较,放置值。观察时间(3 h,6 h,12 h和24 h)对PPP的结果和点的相对解决方案水平面位移监测也进行了调查以证明可以安全地排出哪些位移量根据统计测试程序确定。
2.数据和方法
2.1 模拟装置和GPS数据采集
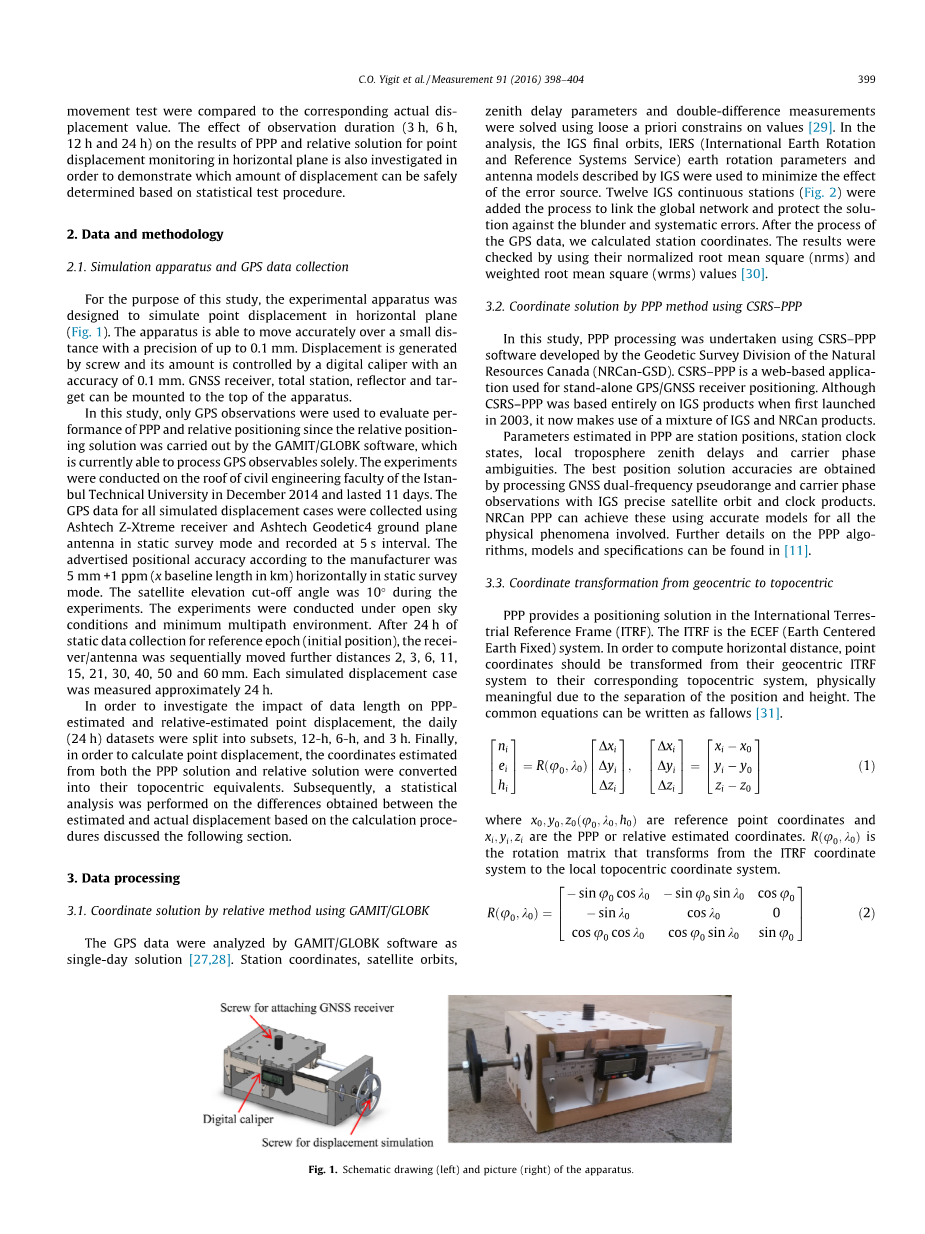
为了本研究的目的,实验装置是旨在模拟水平面中的点位移(图。1)。 该装置能够精确地移动到小的位置上,精度可达0.1 mm。 产生位移
通过螺丝,其数量由数字卡尺控制精度为0.1 mm。 GNSS接收机,全站仪,得到可以安装到设备的顶部。
图1设备的原理图(左)和图(右)
在这项研究中,只有GPS观测值用于评估PPP的相对定位的相对定位 - GAMIT / GLOBK软件进行了解决方案目前只能处理GPS可观测量。实验在伊斯坦布尔土木工程学院的屋顶上进行,博士技术大学在2014年12月,持续了11天。该所有模拟位移病例的GPS数据采集Ashtech Z-Xtreme接收器和Ashtech Geodetic4接地平面天线采用静态测量模式,间隔5秒。该根据制造商发布的位置精度5 mm 1 ppm(x基线长度,km)水平静态测量模式。卫星仰角截止角为10?在此期间实验。实验在晴空下进行条件和最小多径环境。 24小时后参考时期的静态数据收集(初始位置)ver /天线顺序地进一步移动距离2,3,6,11,15,21,30,40,50和60mm。每个模拟位移案例测量约24小时。
为了调查数据长度对PPP的影响,估计和相对估计点位移,每日
(24小时)数据集分为子集,12小时,6小时和3小时。 最后,
为了计算点位移,估计坐标从PPP解决方案和相对解决方案都进行了转换进入他们的中心等价物。 随后,统计对所获得的差异进行分析
基于计算程序的估计和实际位移,重点讨论了以下部分。
3.数据处理
3.1 使用GAMIT / GLOBK的相对方法进行坐标解
GPS数据由GAMIT / GLOBK软件分析单日解决方案[27,28]。 站坐标,卫星轨道,天顶延迟参数和双差测量使用松散的先验约束解决了值[29]。 在里面分析,IGS最终轨道,IERS(国际地球旋转和参考系统服务)地球旋转参数和使用由IGS描述的天线模型来最小化效果
的错误源。 十二个IGS连续站(图2)添加了链接全球网络并保护解决方案的过程,反对错误和系统的错误。 过程之后GPS数据,我们计算了车站坐标。 结果是通过使用它们的归一化均方根(nrms)和加权均方根(wrms)值[30]。
图2用于GAMIT / GLOBK处理的测试点和IGS站点。
3.2。 使用CSRS-PPP的PPP方法的协调解决方案
本研究采用CSRS-PPP进行PPP处理由天津大地测量部开发的软件
加拿大资源(NRCAN-GSD)。 CSRS-PPP是基于Web的应用程序,用于独立的GPS / GNSS接收机定位。 虽然CSRS-PPP首次完全基于IGS产品在2003年,它现在利用IGS和NRCan产品的混合物。在PPP中估计的参数是站位置,站时钟状态,局部对流层天顶延迟和载流子相位歧义。 获得最佳位置解决精度通过处理GNSS双频伪距和载波相位
IGS精准卫星轨道和时钟产品观测。NRCan PPP可以实现这些使用所有的精确模型涉及物理现象。 关于PPP algo-算法,模型和规范可以在[11]中找到。
3.3坐标转换从地心向站心转变
PPP在国际Terres-试用参考框架(ITRF)。 ITRF是ECEF(以地球为中心)地球固定)系统。 为了计算水平距离,点坐标应从其地心ITRF转变系统到其对应的地心系统由于位置和高度的分离而有意义。该
常用方程可以写成如下[31]。
其中x0;Y0;z0;K0(phi;0,lambda;0,h0)是参考点坐标,xi,yi,zi是PPP或相对估计坐标。R(phi;0,lambda;0)是从ITRF坐标转换的旋转矩阵系统到局部中心坐标系。
每个解的局部方差协方差矩阵大地测量系统可以使用误差传播进行计算法作如下:
3.4点位移及其精度计算
一个点的变形可以定义为统计学显着的这一点在两个不同时期之间的位移。 对于例如,在时间(t),点的位置为Pt(nt,et,ht)协方差矩阵和时间,位置相同点是具有协方差矩阵与协方差矩阵。通过差分估计坐标(t)和获得位移:
假设在时间(t)和(t Dt)之间的坐标是不相关的,相同点的坐标的协方差矩阵是:
位移方差由[32]
在这项研究中,变形计算是连续的,它将第一纪元数据作为参考,并将所有的特征与参考时期进行比较。 对于所有观察长度(24小时,12小时,6小时,3小时)病例的参考基准,基于24小时观察数据,将装置的初始位置相结合。 基于参考时期和感兴趣的时期计算的每个epochis的位移及其标准偏差,其是诱导运动后设备的位置。
3.5。 测量位移的显着性
两个时代之间的点的位移与预期无异,形成为空虚。 零假设读
并针对其选择进行了测试
E表示“期望”,检验统计为[33]:
在获得的测试值(T)和临界值之间的比较可以在两种可能的替代方案之间进行判断:如果T lt;,则接受零假设(无明显位移),如果T gt; ,那么alter-原生假说(显着位移)被接受。 和分布正常,因为它们都被计算为两个正态分布的随机未知数的差异。 点位移不是这种情况(d),它是和的非线性函数。 因此,通过模拟[32]确定的讨论的测试统计量的分布函数。 关于临界值的配方和计算程序的更多信息可以在[32]中找到。临界值(Tcrit)的计算程序可以在[32]中找到。
在这项研究中,Tcrit的价值取3为“经验法则”大于从测试分布函数获得的值统计。
4. 实验结果与讨论
在本节中,介绍了实验结果。 24 h,12 h,分别提出和讨论了6 h和3 h的结果。 12小时,每天6 h和3 h的会话是从相应的每天24小时(每天)。 RINEX观察文件12 h,6 h每天3小时的会议从第一次的GPS时间开始观察24小时RINEX文件。
4.1 24小时观察结果
表1显示了基于24小时的两种方法的结果观察并给出计算的位移
公式(6)和位移关系的精度(标准偏差)对于每个模拟情况,根据公式(11)。桌子也提供了估计和模拟dis-放置看看估计的排水量与实际排放量有多近,放置。此外,使用公式(14)的测试值(T)可以是从表中可以看出,统计学意义上的放置是否显着。正如可以看出的那样表,相对估计的位移非常接近模拟位移。相对估计位移 - 模拟位移范围从 0.3 mm到 1.5毫米。位移的标准偏差在左右
plusmn;2.7 mm至plusmn;3.2 mm。 PPP估计的流离失所也很接近模拟位移。 PPP估算的差异位移和模拟位移范围为2.4 mm至 2.7毫米。位移的标准偏差在四周plusmn;4.5mm至plusmn;5.1mm,大于相对的解决方案(系数为1.7)。根据测试值(T)和临界值(Tcrit),相对值检测到的最小位移tive和PPP解决方案分别为10.3毫米和15.5毫米。
4.2 12 h观察结果
表2显示了基于12小时的两种方法的结果观察。 相对估计的流离失所再次是非常接近类似于24小时解的模拟位移。 不同-相对估计位移与模拟之间的关系位移范围为0.3mm至 1.3mm。 标准偏差 -
位移约为plusmn;2.8 mm至plusmn;3.7 mm。; PPP-估计的位移也接近模拟位移。
PPP估计位移与模拟之间的差异位移范围为5.3 mm至 1.2 mm。 标准偏差位移约为plusmn;5.1mm至plusmn;6.8mm,比相对解决方案(比例为2)。 的价值观通过相对和PPP检测到最小显着位移解决方案分别为9.7 mm和18.3 mm。
4.3 6 h观察结果
表3显示了基于6小时的两种方法的结果观察。 相对估计的位移接近于模拟 - 如24小时和12小时的解决方案。差异相对估计位移和模拟位移之间,范围从2.3毫米到1.4毫米。 标准偏差位移约为plusmn;4.2mm至plusmn;5.1mm 差异。
PPP估算位移和模拟位移范围7.3毫米至5.7毫米。 位移的标准偏差为约为plusmn;7.2mm至plusmn;9.7mm,大于rel-(由1.8倍)。 最小值的值
相对和PPP解决方案检测到的位移为16.3 mm和37.9毫米。
4.4 3小时观察结果
表4显示了基于3小时的两种方法的结果观察。 相对估计的位移接近于模拟 - 如24小时和12小时的解决方案。差异相对估计位移和模拟位移之间,范围从4.7mm到 2.9mm。 标准偏差位移约为plusmn;6.4mm至plusmn;9.0mm。 差异PPP估算位移和模拟位移范围3.0mm至 23.1mm。 位移的标准偏差大约为plusmn;17.8 mm至plusmn;24.3 mm,大于相对解决方案(系数为2.6)。 最小值 - 通过相对和PPP解决方案检测到的冰位移分别为28.5毫米和63.1毫米。
4.5 相对和PPP估算位移精度的评估和观察时间的精度
最后,为了进一步加强我们的评估评估相对估计的STD和PPP估计的置换 - 我们计算出每组平均的平均STD值
图4 相对于两种方法的观察期间,模拟和估计位移之间的差异(情况顺序1,2,...10对应于模拟位移2.0,3.0,...,60.0 mm)。
持久的数据集(即3,6,12和24小时)。 获得的结果全部属于图1所示相同组的数据集。 可以从图中可以看出。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141212],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

