英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
具有双速比传动的四轮驱动电动车的扭矩补偿控制和能量管理研究
摘要:本文提出一种新型的四轮驱动电动车布局,包括每个车桥配一个车载电动传动系统。每个传动系包括简化的无离合器的双速比传动系统和开式差速器以将扭矩传递到车轮。这种传动系统布局允许车辆在水平路面上八种不同的档位状态组合,从而增加了在特定的车轮扭矩需求和速度需求情况下以更节能的状态运行车辆的可能性。为了补偿换档期间的扭矩间隙,开发了“扭矩补偿”控制器,其改变了变速器中不涉及的车轴上的电动机扭矩。实验测试显示了用扭矩补偿能力开发的变速策略的有效性。能量效益可以通过比较由恒定的前桥转矩分配控制的车辆以及具有基于离线优化的能量管理系统的相同车辆来讨论。结果表明,更高级的控制器在恒定速度和在不同的驱动周期下能显著降低能耗。
关键词:电动车辆(EV),四轮驱动(4WD),状态选择,扭矩分配,扭矩补偿,双速传动。
I.引言
电动车辆(EV)的特征通常在于车载安装的电传动系统,其中包括具有逆变器的电动机(EM),单速比变速器,开式差速器,等速万向节以及半轴[1][2]。在这种情况下,电动汽车的多速比变速器是一个不断创新的研究领域,因为它们为动力传动系统配置开辟了新的发展途径[3]。
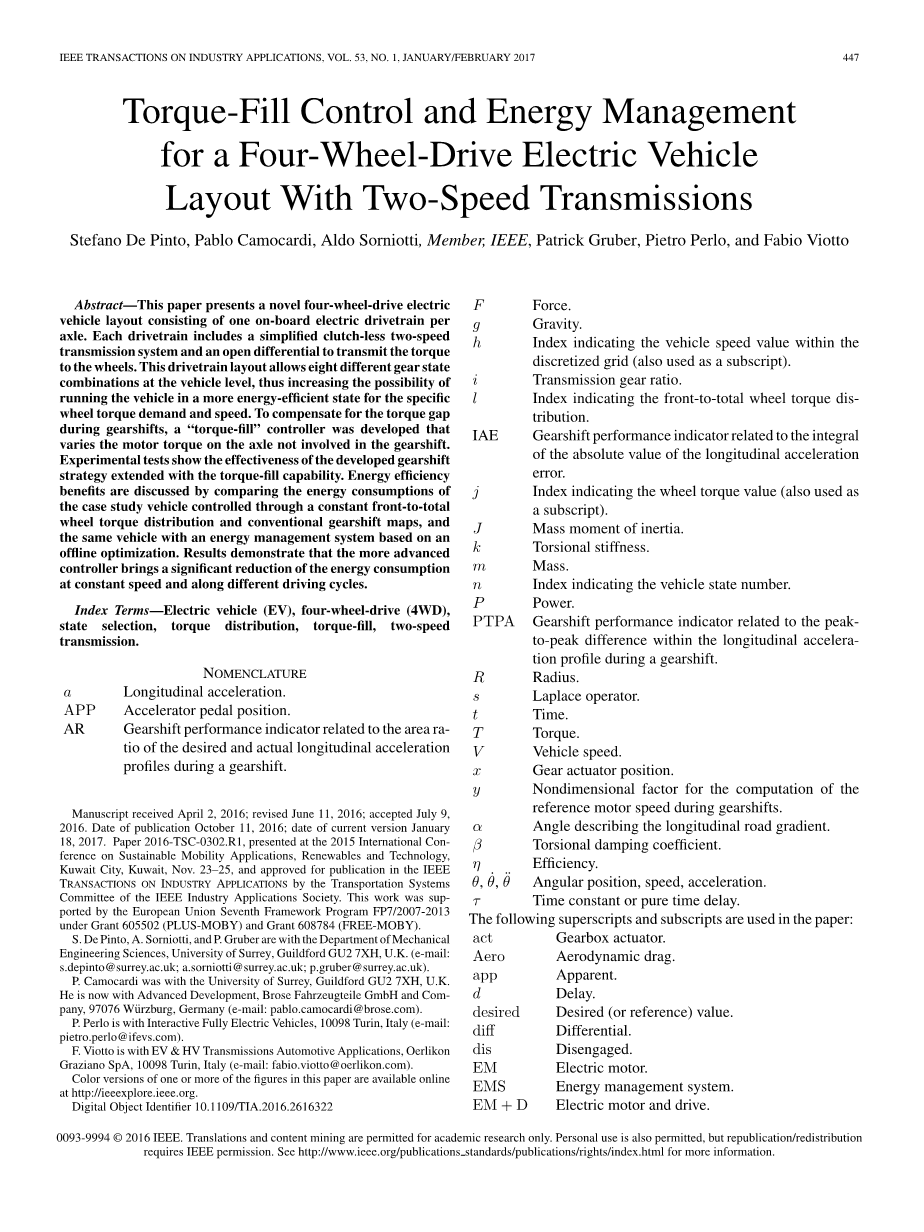
对多速比变速器的需要源于EM在低速下提供最大扭矩的典型特性。在较高速度下,它们的运转通常限于近似恒定的功率区域,有时是在功率随速度变化而降低的区域[1],[2]。特别是在具有有限速度范围的EM的情况下,单速比变速器必须被设计为坡度能力(其需要高齿轮比)和最高速度(其需要低齿轮比[4])之间的折衷。由于这个原因,具有单速比的EV的最高速度通常受到电动机的最大速度而不是其功率的限制。相反的,双速比电动传动系统允许由第一齿轮比来提供期望的纵向加速度和爬坡性能,而第二齿轮可以选择成能够达到指定的最高速度的。结果,双速比电动传动系根据车辆速度扩展了可用的车轮扭矩特性。图1(a)和(b)分别为具有相同电动机的单速比和双速比电动传动系统的车轮扭矩特性的边界,用于本研究的EV示范器的轴。
图1.装备有(a)单速和(b)双速传动系统的电动传动系统的总效率图。
此外,由于电动机的功率是扭矩和速度的函数,所以双速比传动系统在为所分配的车辆速度和车轮扭矩需求选择工作点时,允许其增加灵活性,从而带来潜在的能效改善[5]。例如,图1(a)示出了用于案例研究车辆的车轴的EM驱动和单速比变速器的组合效率值。电动传动系的最大效率(〜93%)的区域在转矩和速度的中间值附近取得,例如在图2中大约为40km/h和270Nm。如图1(a)所示。采用双速比变速器[见图1(b)]将高效率区域延伸到20至60km/h的宽度。与第一和第二传动比相对应的区域的边界在图中由绿线示出。如图1(b)所示,离线计算档位选择以提供最大的总传动系效率。在离线计算中,传输效率必须以映射的形式(例如,作为所选择的档位,扭矩,速度和温度的函数)来表示,如在现代电动传动系统中传输效率的值具有相似的数量级。
尽管有潜在的好处,但是在EV中采用多级变速器的主要障碍是系统复杂性,成本和质量的增加。在复杂性方面,换档过程需要一系列机械步骤,这很难控制[6]-[11]。特别是,多速比变速器主要的潜在缺点之一是在换档期间车轮扭矩的中断,即扭矩间隙,这会增加加速时间并降低乘坐舒适性。为了避免扭矩间隙,基于复杂的变速器布局,例如双离合变速器[12],无级变速器[13]和新型双电动机传动系统[3]等,开发了无扭矩中断的换挡方法。
同时,要实现多速比变速器和四轮驱动(4WD)EV结构相关的潜在能效的提高,需要复杂的控制器来选择最佳状态和前桥转矩分配。这些算法通常基于高级控制结构(例如,在[14]-[16]中讨论的),在工业实现上是具有一定困难的。此外,在车辆驾驶性能方面,面向能效的控制系统的输出在实践中是不可实现的。最后,对于本文作者的知识,文献中的节能控制器集中在具有多速变速器的两轮驱动EV和具有单速变速器或内轮配置的4WD EV。这些EV设置结合了4WD架构和双速传输提供的灵活性,在直行期间比本研究的EV配置控制要更简单。
关于上述几点,本文的主要贡献如下。
1)一种新颖的4WD EV结构的分析,包括机械简单的双速传动系统,没有离合器或同步器。
2)扭矩补偿控制器是基于不处于换挡过程的动力传动系统的扭矩控制来实现的,以便补偿由另一个动力传动系统换挡时引起的扭矩间隙。
3)关于计算高效能量管理系统(EMS)的讨论,用来选择最佳传动比和前桥转矩分配。
本文组织如下。第二部分介绍了由欧盟资助的PLUS-MOBY和FREE-MOBY项目提出的EV架构[17]。相应的车辆仿真模型在第三部分中解释。第四部分描述了换档期间的扭矩补偿控制功能,这是实际实现有效状态选择算法的前提条件。第五节介绍了用于获得最佳齿轮状态和前桥转矩分配的优化算法。第六部分显示了开发的换档策略的实验结果和EMS的模拟结果。最后,第七节报告了主要结论。
II.4WD电动汽车配置
本研究的原型车是在PLUS-MOBY和FREE-MOBY项目期间开发的总质量为730kg的电动城市4WD乘用车(见图2)。每个车轴由14kW(峰值功率)感应电机供电,并配有双速传动系统(见图3)。两个轴的第一和第二传动比分别为12.1和6.7[18]。
图2.案例研究的车辆原型
齿轮箱是在[6]中分析的一个重要的设计简化。实际上,变速器不包括摩擦离合器或同步器,因为同步器是通过控制EM速度来电动执行的。该设计还允许移除摩擦离合器执行器,从而使其质量稍微高于相应的单速传动系统的质量(也参见[19])。与传统的步进齿轮传动装置不同,电力牵引马达从不与传动装置的主轴分离。齿轮通过爪式离合器接合到主轴。为了换档,拨叉和爪式离合器等部件通过专用DC马达致动,同时由传感器检测驱动系统的位置(见图3)。基于牙嵌式离合器位置,可能有三种不同的操作条件[7]。相对于0mm的空档齿轮基准位置,-9mm的爪形离合器位置接合第一齿轮, 9mm的位置接合第二齿轮。
图3.双速传动器原型的横截面视图。
通过结合每个轴的三种可能状态,可以为具有双速比传动系统的4WD EV布局提供八种状态组合(不考虑两个轴上的中性齿轮的状态)。因此,对于车辆速度和车轮扭矩需求(与加速器踏板位置APP相关)的给定值,通常可能会有多种状态,其中每个状态提供不同水平的能量效率。
图4.车辆八个状态下的理论车轮扭矩特性。
更具体地,图4示出了对于每个车辆状态的理论最大车轮扭矩特性Tw,MAX,n(V),排除了两个传动系统处于空档的状态。在这个初步简化计算中忽略了传输效率。不同的齿轮箱状态识别七个区域(从图4和表I中的A到G),边界由以下定义:1)Tw,MAX,n(V)特性;2)在第一齿轮和第二齿轮中可实现的最高速度。最高速度值对于前轴和后轴是一致的,因为它们的传动系统是相同的。在每个区域内,EMS可以在相同的替代车辆状态之间进行选择(参见表I中的“状态数”一栏)。例如,对于区域E的每个点,在低车轮扭矩和速度下,可以考虑八个状态用于有效EMS的设计。此外,对于两个传动系统都起作用的状态,无限的前桥扭矩分配可以提供相同的总体车轮扭矩。
表 I
图4中的每个区域(从A到G)的可用状态的数量
|
Region |
Number of states |
Region |
Number of states |
|
A |
1 |
E |
8 |
|
B |
3 |
F |
3 |
|
C |
4 |
G |
1 |
|
D |
6 |
- |
- |
图4包括使车辆在0%坡度道路上以恒定速度行驶所需的扭矩。其中标称传动系扭矩对应于第二档中电动机最高转速下的车速,高于该速度下的所需车轮扭矩。因此,在0%道路坡度的条件下,车速实际上由电动机速度(在〜105km/h的值)限制,即使是在双速变速器中。鉴于其预期在城市环境中的普遍使用,这不代表特定车辆的问题。在有高速EM驱动器时,单速比和双速比传动系统之间的折衷是更微妙的,因为它主要基于能量效率方面。
两个独立的轴可用于减小换档期间的扭矩间隙,特别是对于低到中等的纵向加速度,从而改善驾驶性能。为此,需要在单个变速器上实现同时驱动换档。例如,当后变速器正在换档而中断相应车轮处的扭矩时,前传动系统可以通过其扭矩需求的可控变化来补偿后扭矩间隙。这导致在大多数操作条件下通过非常简单的传动硬件就可能实现无间隙换档。然而,当两个电动机在接近其最大扭矩水平操作时,系统只能提供部分扭矩补偿。
III.EV模型
在MATLAB-Simulink中实现了纵向车辆动力学的详细模型,其模拟了案例研究4WD EV的两个独立驱动的轴(见图5)。该模型用于评估控制系统性能,以及车辆原型的实验测试。
图5.4WD车辆模型的简化布局。箭头表示在牵引条件下在前轴和后轴上的一档中的功率流。
每个轴的模型包括EM,齿轮箱,差速器,半轴(模拟为扭转弹簧和阻尼器并联)和轮胎。通过作出转矩和速度的函数的相应图来模拟每个EM驱动器的效率。非线性轮胎行为用Pacejka Magic公式结合可变松弛长度模型建模[20]。
根据爪式离合器在每个主轴上的可能位置(在部分II中讨论),变速器模型模拟齿轮箱的三个可能的操作条件,即接合的第一档,接合的第二档和空档。当齿轮啮合时,传动系的近似动力学由等效惯性建模,其中等效惯性是从EM和差速器(包括)之间的各个传动系部件产生的。次级效应例如传动轴的弹跳和扭转变形被忽略。对于后传动系报告等式(1)-(5)。前传动系模型与后传动系模型相同。
A.啮合的第一齿轮或第二齿轮
在这种情况下,主轴和副轴根据啮合的齿轮比旋转。 第一/二档中的传动系的扭矩平衡方程为
(1)
在该模型中,传动效率通过由制造商(Oerlikon Graziano SpA)提供的查找表来表示,该查找表是所选择的档位,电动机扭矩,主轴速度和变速器温度的函数。查找表是基于传输功率损耗(例如,由齿轮啮合,轴承,风阻和搅动引起的)的详细稳定模型的结果,其对于其它传动配置是经过实验验证的。在(1)中和在本文的其余部分中,对于牵引情况报告因子(在再生期间应考虑因子)。第一/第二齿轮中的传动系的等效质量惯性矩为 (2)
公式(1)和(2)仅用于模拟具有相同轴的两个轮的对称行为的条件(即,对称半轴和轮胎道路参数)。对于更复杂的情况(例如,不对称的轮胎道路摩擦条件),根据在[21]中描述的方法,采用包括差动内部构件的动力学的模型。
B.中立
在这种情况下,传动系模型的特征在于附加自由度(DoF),EM动力学与变速器输出轴动力学分离。因此,第一DoF涉及刚性的连接到主轴的EM旋转部件和传动部件。第二个DoF是指变速器的副轴和差速器。在公式中
(3)
其中
(4)
C.离合器位置
牙嵌式离合器组件的位置(由图3所示的直流电动机控制)通过纯时间延迟和时间常数的一阶传递函数建模:
(5)
通过在换档致动器上的特定实验来识别(5)中的参数。
IV.齿轮控制
基于最佳状态的选择,具有转矩补偿的换档控制是实现高级EMS的基本特征。本节介绍第六章实验分析采用的换档控制器。为了强调其能力,提供了本文所研究车辆的实验测试结果。该操作是后轴上缓慢降档(从第二档到第一档),而前传动系保持在固定的第一档位。在测试期间在两个轴之间施加恒定的APP和前桥扭矩分配(即针对当前参考状态计算的来自EMS的参考扭矩分布)。为了证明在换挡期间能够使车辆不断加速的可能性,前后电动机转矩的值被设置为显著低于在该车速下的最大可实现值。
图6.从后轴的二档到一档的实验降档:档位执行器位置,EM速度和转矩的动态,参考值和实际值。
降档被分成五个功能阶段,由图1中的大写字母表示。图6示出了爪式离合器位置的时间历程,后部电动机的参考速度和实际速度,以及在操纵期间的前部和后部电动机扭矩需求。五个阶段如下:
A-B:扭矩减小阶段;
B-C:爪形离合器从初始齿轮(即,在这种情况下的第二齿轮)位置到中间位置的位移;
C-D:惯性阶段;
D-E:爪形离合器从空档位置到进入齿轮(即,在这种情况下的第一档)位置的位移;
E-F:转矩增加阶段。
在车辆正常行驶期间,通过EMS(在第V节中描述)根据能量效率和驾驶性标准来设置参考状态和车轮扭矩分配(因此也是电动机扭矩分配)。在换档期间,变速器控制单元(TCU)会修改由EMS提供的电动机扭矩需求。
换档控制器最初使后部传动系的电动机转矩降低(即在图6中的点A和B之间的电动机转矩的减少),而前部电机转矩增加,以保持大致恒定的车辆牵引力。
在扭矩补偿过程中,前EM扭矩需求由下式给出
(6)
是由EMS提供的前EM的扭矩需求,即如果后轴未参与换档,则前电动机将产生的扭矩。是如果后驱动系已经处于第一档位,则由EMS输出的后EM
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[140111],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

