
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
用于水下推进的反转永磁无刷直流电机
摘要:本文提出一种新的反向旋转永磁无刷直流电机(CRBLDCM)用于水下推进。 这种电动机与传统的BLDCM不同之处在于转子和电枢都在相反方向上旋转,这特别适用于水下推进系统。 在本文中,基于其工作原理建立了CRBLDCM的数学模型,分析了运算性能,从中推导出稳态运行的反向旋转条件。此外,提出了使用两组位置传感器进行反向旋转的控制策略。本文提出的仿真和实验结果表明,本文提出的控制方法不仅简化了控制系统的结构,而且确保了电机的可靠启动和精确换向。
关键字:反向旋转,永磁,无刷直流电机,位置传感器
Ⅰ.介绍
如今,电力推进系统正在越来越受到人们的关注,因为它们具有相当的优点,例如高效率,低噪声和由于使用常规推进系统而消除陀螺效应[1-2]。在该应用中,永磁无刷电机是最具竞争力的选择,因为它们在诸如功率密度,惯性力矩和电效率的关键类别中具有吸引人的特性。 一种具有轴向磁通的永磁同步电机被用于船舶推进系统[3]。利用一个定子和两个独立的转子来驱动主螺旋桨和反向旋转螺旋桨,这种电动机通常具有复杂的结构和制造。文献[4]报道了一种用于水下航行器的反转环推进器,这表明环推进器基本上是两个具有大直径空心转子的永磁无刷电机。
本文提出一种新的反向旋转永磁体BLDCM(CRBLDCM)用于船舶推进应用。与以前提出的反向旋转电机相比,这种电机具有比传统的BLDCM相对更简单的结构,除了转子和具有嵌入其中的绕组的电枢都在相反方向上旋转。在本文中,基于其工作原理建立了CRBLDCM的数学模型,分析了运算性能,从中推导出稳态运行的反向旋转条件。此外,提出了使用两组位置传感器进行反向旋转的控制技术。本文还展示了一台原型机的仿真和实验结果,证实了本文的控制方法不仅简化了系统的结构,而且确保了电机的可靠启动和精确换向。
Ⅱ. CRBLDCM的构造和数学模型
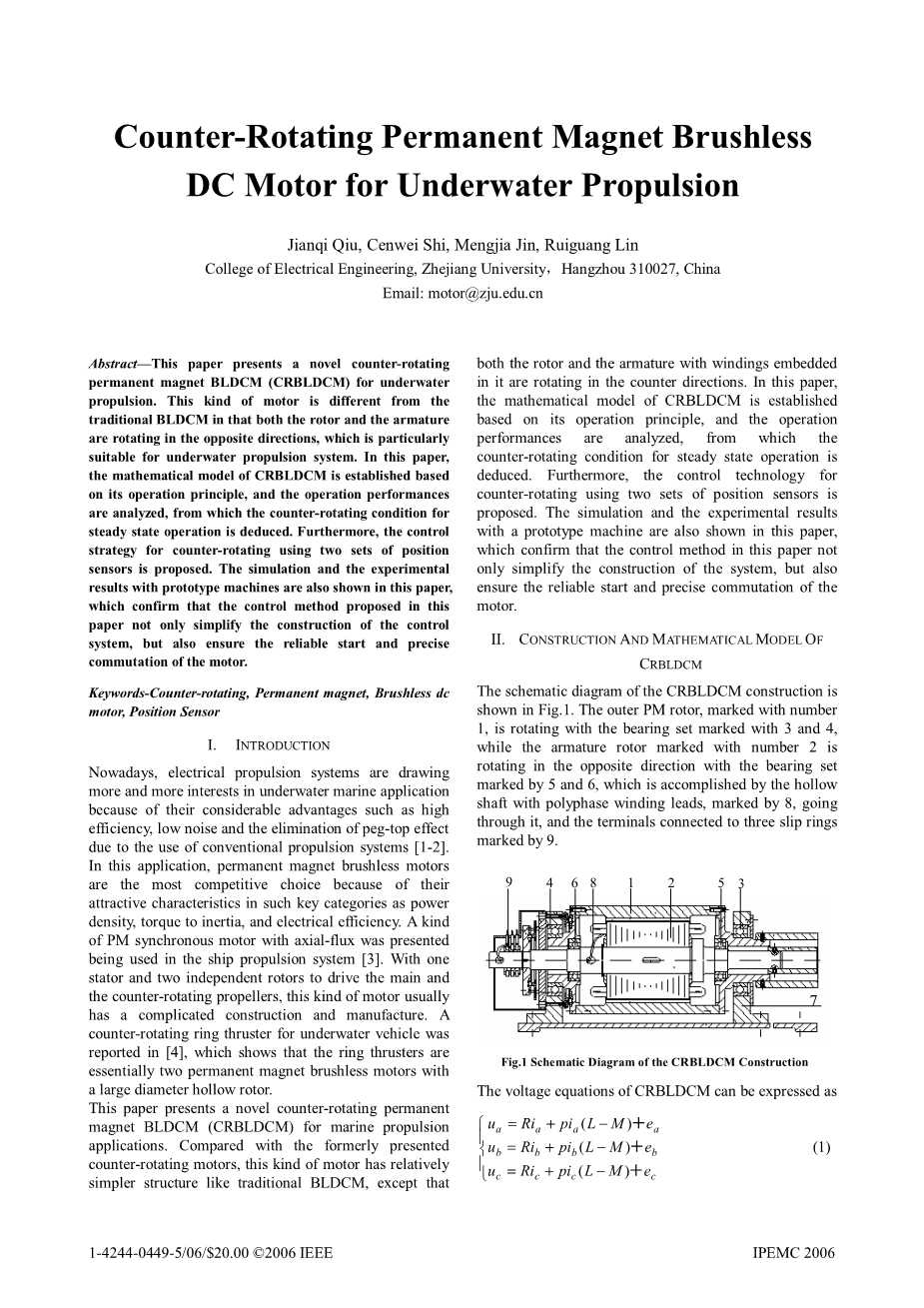
CRBLDCM结构示意图如图1所示。 标记为1的外部永磁转子与标记为3和4的轴承组一起旋转,而标记为2的电枢转子沿着与标记为5和6的轴承组相反的方向旋转,这是由多相绕组引线的空心轴完成,标记8通过它,并且端子连接到由9标记的三个滑环。
图1. CRBLDCM结构示意图
CRBLDCM的电压方程可以表示为
其中ua,ub,uc是相电压,ia,ib,ic是相电流,ea,eb,ec是相位反电动势,L和M分别表示相自感和互感。
电机的相位反电动势可以描述如下
其中omega;r1,omega;r2是永磁转子和电枢转子的电角速度,theta;r1,theta;r2是两转子相对于静止部件的角度,fa(theta;r1 theta;r2),fb(theta;r1 theta;r2),fc(theta;r1 theta;r2)是三相反电动势形状函数。
运动方程和电磁转矩可以表示为(3)和(4)
其中J1、J2是永磁转子和电枢转子的转动惯量,TL1,TL2分别表示两个转子的负载转矩,B1,B2是两个转子的阻尼系数。
Ⅲ. 用于稳态操作的反向旋转条件
对于反向旋转BLDCM,作用在两个转子上的电磁转矩具有相同的大小,但方向相反。 然而,相同幅值的电磁转矩通常不意味着两个转子在稳定状态下的相同速度,因为它们的惯性,系数和机械负载转矩是不同的。 如果两个转子的参数非常不匹配,则其中一个转子将缓慢停止,并且反向旋转BLDCM将变为正常的单旋转BLDCM。为了分析这些参数对速度特性的影响,对具有不同参数的两个样机进行模拟研究。 两个电机的参数如表Ⅰ所示,其中T01,T02分别代表内外转子的空载转矩,Tm1,Tm2代表机械负载的两个转子。总负载转矩可以表示为(5)。
表Ⅰ用于仿真的两个样机的参数
两个样机的不同机械负载的速度特性的仿真结果如下如图2和图3所示。 主要结论可概述如下。
- 如果两个转子的空载转矩不相等,则在空载条件下不能获得稳态运行的反转条件。 具有较高空载转矩的转子将缓慢停止,如图2-(a)所示。 通过在空载转矩较小的情况下在转子上施加额外的机械负载,两个转子的总负载转矩变得相同,如图2-(b)所示,两个转子在稳定状态下以不等速运行。
- 对于具有恒定扭矩的机械负载,两个转子的空载转矩应该没有差别,否则反向旋转将失败,即使相同的恒定机械负载转矩作用在它们上,如图3-(a)所示。
- 如果机械负载的大小随着转子速度变化,例如风扇或泵类型,则可以容易地实现反向旋转。 在这种情况下,两个转子的相同的空载转矩不是反转必不可少的条件,两个转子的稳态速度可以通过机械载荷的变化来调节,如图3所示 - (b)和图3-(c)。
- 两个转子在稳定状态下的速度也受到在相同负载转矩(TL1=TL2)下两个转子的阻尼系数的影响。永磁转子和电枢转子的惯性矩确定动态性能,并且不影响两个转子的稳态速度。
(a)
(b)
(c)
图2 样机Ⅰ的速度特性
(a)
(b)
(c)
图3 样机Ⅱ的速度特性
Ⅳ. CRBLDCM的控制技术
- CRBLDCM位置传感器
在本文中,采用两组位置传感器来检测永磁转子和电枢转子相对于静止部分的位置信号,并且通过进一步计算获得两个转子的相对位置信号,从而精确换向信号。
实验电机中的霍尔传感器布置如图4所示,六个霍尔传感器位移30°电角度提供了一个12步转子位置信息相对于静态部分,以及由信号产生的波形传感器如图5所示。来自两组霍尔位置传感器的信号的组合形成二维逻辑表(12times;12),并且可以用于直接产生绕组的换向序列。
图4 霍尔传感器在PCB板中的布置
图5 霍尔传感器的信号
所提出的位置传感器方法通过取消对传感器终端使用滑环而简化了系统的结构。 CRBLDCM可以从任意的初始位置可靠地开始,并且通过进一步的换向校正,将总是获得精确的换向。
- CRBLDCM的相对位置估计
反向旋转BLDCM可以使用来自两组位置传感器的换向信号直接正常运行,但是换向瞬间将不确定地提前或延迟,因为两个转子的不等速度,这使得电流波形失真并产生转矩波动。精确的换向时刻取决于相对位置信息,其可以如下估计:
其中theta;是两个转子之间的相对角度,并且在每个PWM周期计算。转子速度omega;r1或omega;r2每个周期估计12次,它是一个周期中的平均速度。相对角度theta;在0°电角至360°电角之间变化,每60°电角,换向信号被触发到相应绕组的能量,在电气周期中产生总共六个换向信号。实验结果如图6所示,虽然两个转子的速度不相等,六个传导模式的换向间隔几乎与所提出的估计方法相同。
图6 估计的相对角度和换向信号
Ⅴ. 实验结果
该实验在反向旋转的BLDCM装置上进行,其中一个装置用作电动机,而另一个装置用作发电机。 由发电机产生的电能通过电阻负载消耗。整个驱动系统由低成本,定点DSP(TMS320LF2407)控制。 控制系统原理图如图7所示。
图7 控制系统示意图
实验结果如图8〜图11所示。图8示出了来自PM转子和电枢转子的霍尔传感器信号,指示两个转子的速度不相等。图9示出了使用来自两组霍尔位置传感器的换向信号的电流波形,电流波形在没有相对位置估计的情况下大大失真。它还指示六个导通模式的换向间隔彼此不同,这是由两个转子的不等速度引起的。图10显示了开关过程中电流波形的连续变化。开关过程由电机起动阶段自动由控制系统完成。通过比较图9和图11,显然,相对位置估计显著减小了电流失真,这证明了控制策略的准确性。
图8 来自永磁转子和电枢转子的位置传感器信号(顶部:永磁转子,底部:电枢转子)
图9 无相对位置估计的电流波形
图10 开关过程中的电流波形
图11 端子电压波形和相对位置估计的电流波形
Ⅵ. 结论
本文介绍了一种用于水下推进的新型反向旋转永磁无刷直流电机。通过分析电动机的机械特性,可以得出结论,稳态反向旋转操作条件取决于PM和电枢转子的参数,例如空载转矩特性,转动惯量,阻尼系数,以及机械负载转矩,因此两个转子的参数应尽可能设计得尽可能近。模拟和实验结果证实,使用两套位置传感器的控制方法不仅简化了系统的结构,而且确保了电机的可靠启动和精确换向。
参考文献
[1] Mei Duanjing, “Electrical thrust in opposite direction of aggressive submarine” Marine Electric amp; Electronic Technology, No.2, 1995, pp.30-35.
[2] P. Pillay and R. Krishnan, “Modeling of permanent magnet motor drives”. IEEE Transactions on Industrial Electronics,Vol.35, No.4, 1998, pp.537-541.
[3] F.Caricchi, F.Crescimbini, and E.Santini, “Basic Principle and design Criteria of Axial-Flux PM machines having Counterrotating Rotors”, IEEE Transactions on Industry Applications, Vol.31, No.5, 1995, pp. 1062-1068.
[4] J.K.Holt, and D.G.White, “High efficiency, counter-rotating ring thruster for underwater vehicles”, Autonomous Underwater Vehicle Technology, 1994, pp. 337-339.
轴向磁通永磁同步电机作为电动车牵引驱动器的设计与分析
摘要:本文研究轴向磁通永磁同步电机作为牵引电机用于电动汽车。假定的边界条件便于它们作为近轮电动机的应用。目的是将中心电动机的优点与轮毂电动机的优点相结合。 所有研究的电动机变型都用双定子实现,即转子盘的两侧各自面对定子。 与具有一个定子和一个转子的双转子变型或变型相比,详细解释了该布置的优点。 此外,还分析了扇区定位器的使用是否可行,如果可行,这是应对的技术挑战。 此外,总结了轴向磁通永磁电机(AFPM)与常规径向磁通电机相比的优点和缺点。 最后,考虑扭矩曲线来研究不同类型的绕组。 端部绕组的形状是在设计过程中考虑的另一个要素。
关键词:轴向磁通永磁同步机,盘式转子,扇形定子,轮毂电机,中央电机,端部绕组
Ⅰ.介绍
车辆的电气化是环境友好型交通的主要挑战。目前,作为传统的径向磁通电机设计的永磁同步电机和感应电机可能作为主要的驱动器进行讨论。典型的设计类型是通过齿轮驱动一个轴或四个轮的中心电动机,或驱动一个轮的近轮电动机。在近轮电机的情况下,电机集成在车轮中,因此允许扭矩矢量[1],[2]。与轮毂电机相反,安装空间不直接受轮[3]的限制。因此,集成在车轮中的电动机具有将直接驱动的轮毂电动机的优点与中央电动机的优点相结合的潜力。在本文中,对作为轴向磁通电机设计的扇形电机的概念进行分析。
扇形电动机应配备一个牢固安装在旋转轴上的转子(见图1)。 定子牢固地安装到底盘,因此不是非簧载质量的一部分。 智能允许定子和转子之间在径向方向上的相对运动。 为了避免轴向力,必须使用双定子或双转子。 最佳的设计使磁性材料的使用最小化。 因此,这里考虑双定子变型。 除了具有双定子和双转子的变型,图2示出了具有一个转子和一个定子以及具有多个定子和转子的解决方案。
图1 近轮电机设计为具有扇形定子的轴向磁通电机
关于图2(d)所示的变型,轴向磁通电机的结构允许通过增加定子和转子的数量来在轴向方向上缩放功率谱。 多层设计的一
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137118],资料为PDF文档或Word文档,PDF文档可免费转换为Word

