英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于扰动观测器的一种消防救援云梯的轨迹控制方法
Nico Zimmert and Oliver Sawodny
摘要:轻型结构被用于现代消防救援云梯以分别提高其最大运行速度、最大长度和外伸距离。因此,梯架的刚度受限制并且更易受到偏转时高频震荡的影响。本文讨论的转台云梯的主动减震。为反馈云梯震荡降低效果使用了陀螺仪和应变器。使用Luenberger型观察器将基波震荡从高频震荡分离出来。由于计算工作量和测量噪声,仅仅将基波震荡的估计状态用于反馈。提出的控制方案将降低云梯的基波震荡并逐渐稳定参考轨迹的系统,从IVECO DLK 55 CS消防救援云梯的测试结果验证了所提控制结构的效率。
Ⅰ.引言
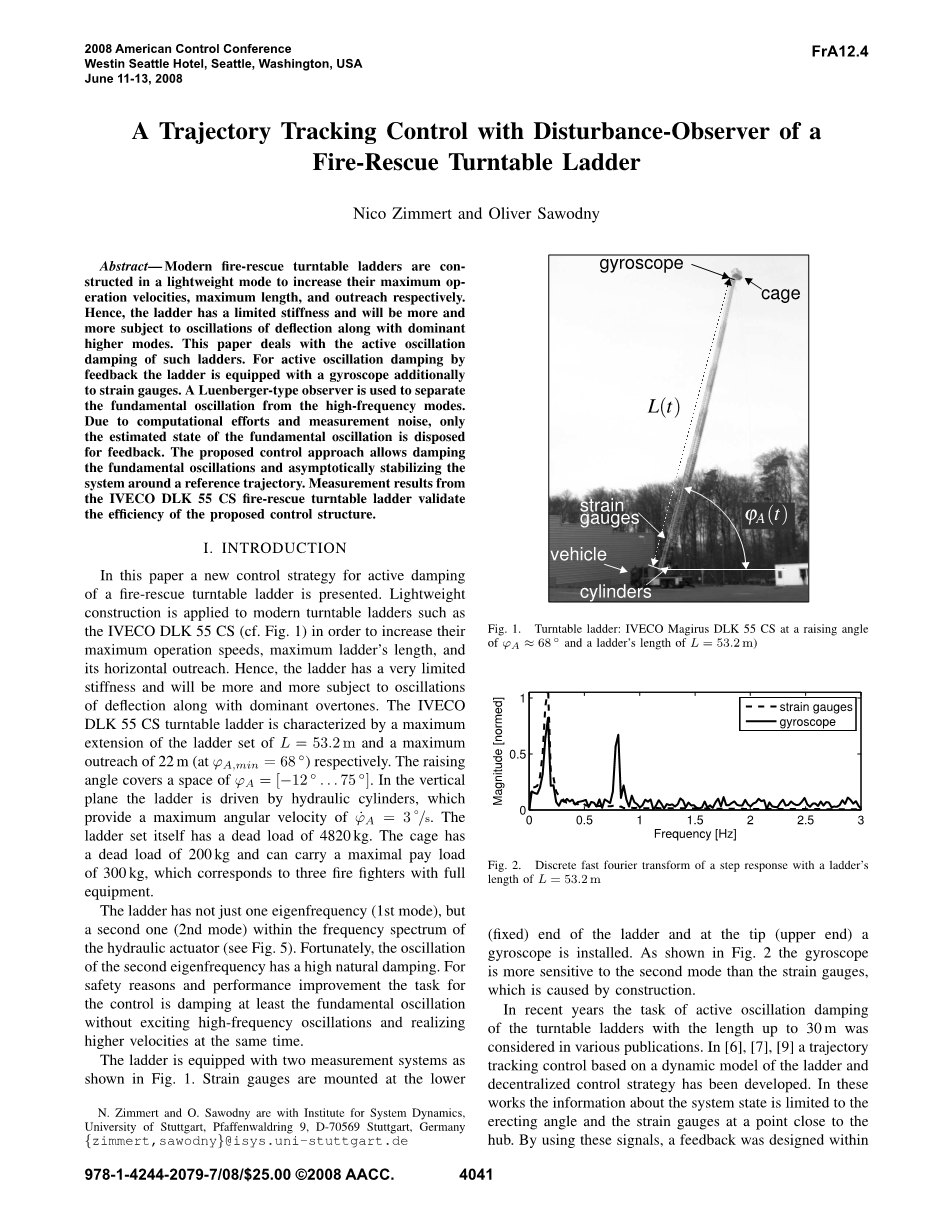
在本文中,将提出一种新型的能够有效减低消防云梯震动的控制方案。轻型结构应用于像IVECO DLK 55 CS(参见图1)的转台云梯以达到提高云梯的最大运行速度,最大长度和水平伸长距离。因此,梯架的刚度受限制并且更易受到偏转时高频震荡的影响。IVECO DLK 55 CS转台梯的特点是最大延伸梯组L = 53.2m,最大外伸22m(phi;A,min = 68°),抬升角度phi;A = [-12◦... 75◦]。在垂直方向,梯子由液压缸驱动提供phi;A = 3◦/ s的最大角速度。梯子本身具有4820kg的静载荷。笼子有空载200kg,可承载最大工作载荷为300kg,相当于三个消防员满载设备。这梯子有不只是一个固有频率(第1模式),在液压执行机构的频谱图中可以看到第二固有频率(参见图5)。幸运的是,第二固有频率的震荡具有高的自然阻尼。出于安全原因和性能改进,控制的任务是至少衰减基本震荡,而不激励高频振荡并同时实现更高的速度。
图.1.转台梯:IVECO Magirus DLK 55 CS,提升角phi;Aasymp;68°,梯子长度L = 53.2m
图.2.阶梯响应的离散快速傅立叶变换,梯级长度L = 53.2m
梯子配备有两个测量系统,如图1所示,应变计安装在梯子的下(固定)端,并在尖端(上端)安装一个陀螺仪。如图2所示,由于结构原因,陀螺仪对第二模式比应变仪更敏感。
近年来,在各种文献中有关于长达30m的长度的转台梯有效减震方法。在文献[6],[7],[9]中,已经开发了基于梯形图的动态模型和分散控制策略的轨迹跟踪控制。在这些文献中有关系统状态的信息被局限于在靠近轮毂上的点处的升起角和应变仪。通过使用这些信号,在多体系统模型的框架内设计反馈。设计的控制器能够有效地减少与基本振荡有关的摇摆。然而,它不能降低不期望的高频震荡,这种高频震荡特别对于大长度的云梯有显著的影响。
在文献[11]中,转盘梯被认为是一个基于欧拉 - 伯努利梁概念的被动关节的柔性机械手模型。反馈设计应用了Galerkin近似法。在文献[12],[13]类似的方法应用于梁的Timoshenko模型。为了测出设计的反馈规律,提出使用拥有更强大计算能力的微型处理器的动态观测器
文献[5]中描述了末端一质点的梁的欧拉 - 伯努利模型。根据分析的本征函数,仅使用第一和第二模式的建立模型。在此基础上导出被测对象反馈定律。除了应变仪之外,被测对象还应装有陀螺仪。因此,观察者是不必要的,因为通过求解两个测量的代数方程的系统来确定所有状态。在本文中,我们将使用多体系统的数学模型。运动的微分方程是通过应用拉格朗日形式([2])。液压致动器的动力学近似于一阶传递函数。基于动态模型的简化来制定前馈和反馈回路的设计。因为如果反馈回路将被闭合,主要的高频振荡将引起问题。提出了一种干扰观察器,其将基波振荡与谐波分离。由于存在两个测量结果,观测器是MIMO型的。因此,观测器通过使用MIMO系统的观测器规范形式([3]和[4])来设计。该控制概念已应用于由采用固定点算法的微控制器驱动的IVECO DLK 55 CS火灾救援转台梯。在开发控制策略和观测器设计时必须考虑这一点。在第Ⅱ节中,得到了被测对象的数学模型。第Ⅲ节开头给出了控制结构的概述。第Ⅲ节A讨论前馈回路的设计,第Ⅲ节B讨论反馈回路。为了消除来自测量信号的谐波,在第Ⅳ节中给出了抗干扰观察器设计。在第Ⅴ节中获得和分析测量结果以显示所提出的控制的有效性。在第Ⅵ节中,给出了结论,并讨论了未来工作的各个方面。
Ⅱ.动态模型
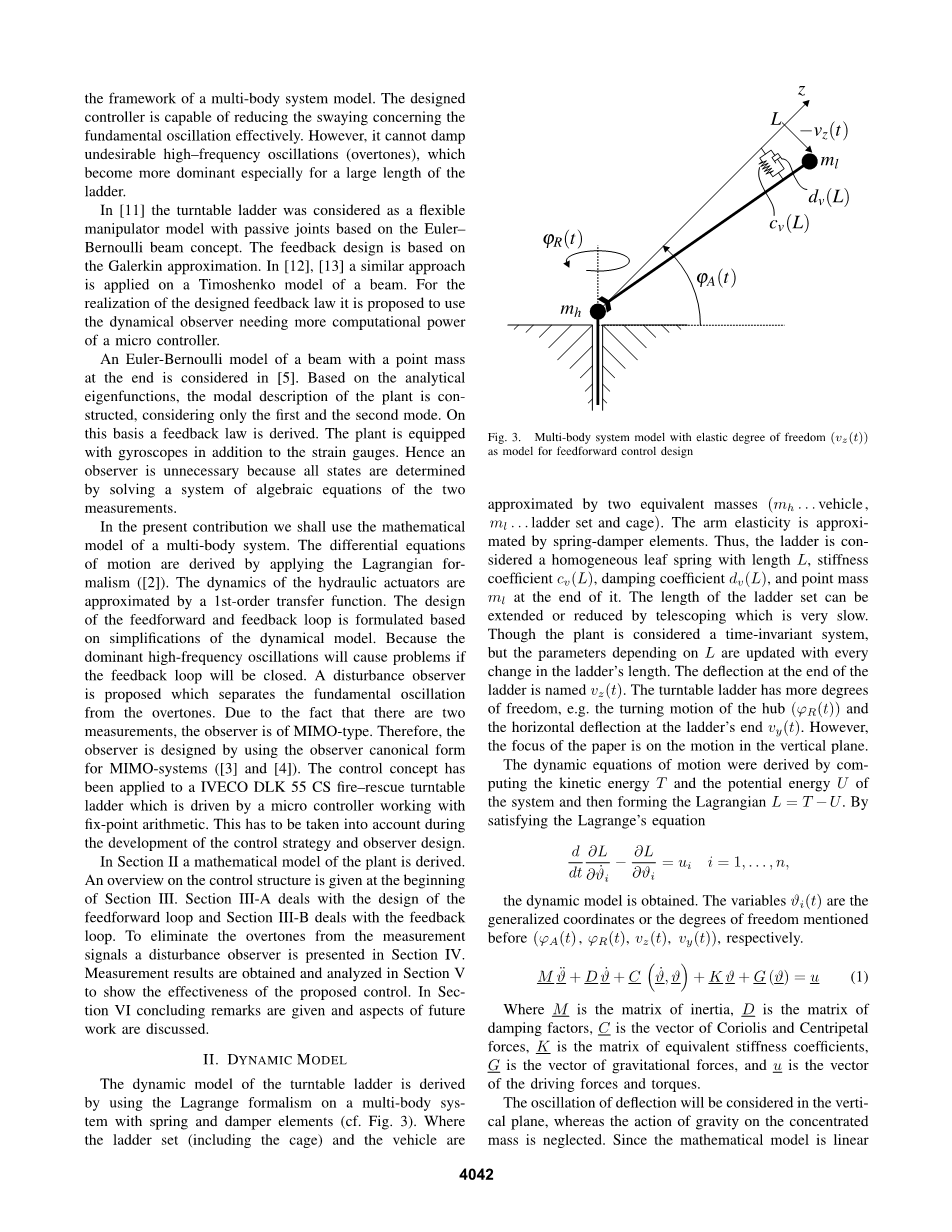
通过在具有弹簧和阻尼器元件的多体系统上使用拉格朗日形式导出转台梯的动态模型(参见图3)。其中梯子组(包括登高台)和车辆近似于两个等效质量物体(车辆,梯子组和登高台)。臂弹性由弹簧阻尼器元件近似。因此,梯子被认为是具有长度,刚度系数(L),阻尼系数(L)和在其末端的点质量的均匀片簧。梯子组的长度可以通过非常缓慢伸缩来延长或缩短。虽然被测对象被认为是不随时间变化系统,但是取决于L的参数随着梯子长度的每次改变而更新。梯子端部的挠度称为(t)。转台梯具有更多的自由度,例如, 转台的旋转运动(phi;R(t))和梯子底部的水平偏转(t)。然而,论文的讨论的是在垂直平面中的运动
图3.具有弹性自由度的多体系统模型((t))作为用于前馈控制设计的模型
通过计算系统的动能T和势能U,然后形成拉格朗日L = T-U,得到运动的动态方程。通过满足拉格朗日方程
获得动态模型。变量theta;i(t)分别是之前提到的广义坐标或自由度(phi;A(t),phi;R(t),(t),(t))。
其中M是惯性矩阵,D是阻尼因子的矩阵,C是科里奥利和向心力的量,K是等效刚度系数的矩阵,G是重力向量,u是向量驱动力和扭矩。偏转的振荡将在垂直平面中考虑,而重力对集中质量的作用被忽略。由于数学模型对于小偏转是线性的,并且要实现云梯的稳定必须考虑到云梯的重力和预应力作用。因此,对于从(1)的控制器设计公式,提取对于平面垂直运动重要的方程。
因为科氏力产生的作用对控制器设计影响不大,为简单起见,其被忽略即(t)=0。由于旋转运动相当缓慢(phi;R lt;lt; 1),并且该运动轴由单独的控制器( lt;lt; 1)主动阻尼。 为了减少计算时间,这种简化是相当方便的。
致动器的动力学近似于一阶传递函数,因为存在气缸液压的辅助流量控制。根据结构确定取决于安装角k A(phi;A)的非线性直流增益。
选择状态向量:
下面的状态空间模型导出
这个模型是控制器设计的基础。
Ⅲ.轨迹跟踪
该控制包括前馈和反馈回路。结构如图4所示, 在使用用于模型反演的基于平坦度的方法的多体系统模型的框架内计算前馈控制。闭环系统的参考输入是来自操作者手调平器的信号((t))。因此,需要轨迹发生器来提供满足运动约束的可行的参考轨迹()。反馈估计状态以沿着参考轨迹稳定设备。干扰观测器参考两个测量((t),(t))将基本振荡与另一振荡振幅()和测量噪声分离。
图4.控制结构图
由于梯子可以延伸到不同长度,梯子的参数必须在每个时间段(例如刚度,本征频率,主导模式的阻尼系数等)被更新。幸运的是,梯子的长度变化非常缓慢,所以它可以被认为是一个参数。 对于控制器设计,系统的时间方差可以忽略,因为所有参数取决于梯形图的长度。然而,取决于梯子长度的增益调度对于在梯子的整个工作空间内获得良好的性能是必要的。
A.前馈控制
为了反演(4)中提到的模型,必须找到相对程度等于系统阶数(r = n)的差分平方。
相对度r定义如下
微分算子表示沿着矢量场f的自变量的李氏导数,分别是沿矢量场g的李氏导数。在(5)中提到的实数输出具有相对度r = 2 lt;n = 4。因此,y不是平坦输出。 如果我们假设/ Llaquo;1,一个新的输出如下
得到相对度r = n = 4。 控制输出和差分平坦输出之间的差异是可以忽略的。
通过使用Byrnes-Isidori正态形式:
和微分方程变换
系统可以写成
该模型可以相对于差分平坦输出反相。 新的控制输入被定义为相对于平坦输出的时间的n阶导数
所以控制信号u由下式确定
通过将模型反演应用于系统,我们获得具有输入nu;和差分平坦输出的四个积分器的链(系统阶数)。
B.反馈控制
作为反馈,已经选择了标量比例控制器。 这是为了实验者的方便,因为他对确切的轨迹跟踪不感兴趣。 他的关注是有最小负载摆动的平稳运动。 但是如果我们使用完整的状态反馈,僵硬的自由度将与灵活的系统状态矛盾。 然而,轨迹跟踪的精度损失很小,但优点是用户的接受度更高。 另一个原因是较低的成本,因为具有较小分辨率的编码器可以用于感测提升角(phi;A)。 最后还有一点,使用一维比例控制器的计算成本也较低。
控制器增益可以通过标准装置来确定尺寸,例如。 因为满足系统(4)的卡尔曼可控性准则((L)equiv;0,(t)equiv;0)
图5.梯子在其长度上设置的本征频率(f i =omega;i /2pi;)
Ⅳ.干扰观察仪
干扰观察器是必要的,因为需要从反馈中消除谐波。过滤传感器信号,例如,与n阶低通滤波器不适用。这是因为前两个模式的频率太靠近在一起(图5),因此需要高阶低通以确保超过截止频率的急剧下降。这将导致非常强的相位失真,导致不稳定性。
不需要考虑更高的模式,因为液压致动器的截止频率约为3Hz。两种模式的信息均匀分布在陀螺仪信号中。图2陀螺仪测量的峰值是阶段的。应变计感测第二模式(谐波)较少,特别是在闭环控制中,这导致不被预期的结果。因此,使用观察器来估计状态。 简单来说,观察器必须使用来自陀螺仪的信息来消除应变仪信号的谐波。
观察仪的动态模型包括两个强制振荡。偏差(t)是基本梯子的摇摆的振幅,(t)是谐波的振幅,其被认为是干扰并且被丢弃用于控制器反馈。通过理论和实验分析已经确定了诸如阻尼系数Di,圆形本征频率omega;i和直流增益kappa;i的参数。所有参数取决于梯形的长度(例如f i =omega;i /2pi;, 参见图5)。因此,观测器的增益H是根据L。在操作期间,在每个时间段中更新增益。振荡由梯子的角加速度( A(t))主要影响。
陀螺仪信号(t)中的偏移漂移和测量噪声被考虑在一个微不足道的动态
选择估计的状态向量
我们得到一个线性状态空间描述
与系统矩阵和输入向量如下
因为有两个测量,我们必须考虑到系统的输出是一个维度为二的向量。假设应变计感测到没有任何谐波和任何偏移的应变。陀螺仪测量基波振荡以及谐波,并且其具有如前所述的偏移。
可观测性矩阵具有满秩
因此,可以估计所有状态。 使用(t)作为实测量向量,Luenberger类型的观测仪可以写为
对于观察者反馈增益H的设计,正在使用观测仪规范形式的描述。在转换成观测方程规范形式([3] p.200等)之后,系统矩阵和输出矩阵具有形式(仅提及不同于零的元素)
在这种形式中,观测器增益矩阵的元素的计算更容易,因为可以使用标准装置,如极点布置([4] p.115等)。第一元素和受到属于第一动态子系统(第一振荡)的所放置的特征值的影响。元素(j = 1,2,3)取决于三个极点(及其位置),其涉及第二动态子系统(第二振荡和偏移)。元素和是两个子系统的交叉项,它们不受任何放置的特征值的影响。
观测仪H的反馈矩阵可以通过观测仪规范形式Ho运用逆变换观测仪增益矩阵得到。变换矩阵是观测器规范形式的系统的逆可观测性矩阵
Ⅴ.测量结果
在本节中,我们提出实验结果,这是使用拟议的控制概念实现的。扰动观测器的效率如图6所示。 在该实验中,梯子由致动器和外力激励,使得谐波具有大的振幅。与纯传感器信号(应变仪)相比,观测仪(固体)明显降低了高频振荡的振幅。
在第二个实验过程中,梯子从65◦到71◦,没有任何控制器的动作。只有一些坡道和过滤器平滑从运营手杆的信号。然后,用由扰动观察器支持的主动振荡阻尼重复相同的运动。梯子延伸到53.2m的最大长度。
图6.基本振荡的振幅:感测状态(固体,应变计)与观察状态(点划线)
图7. 角度位置在梯子末端的角度
图7示出了保持架(梯子尖端)的角位置及其参考轨迹。点划线是差分平稳输出(Z1,ref = refasymp;y ref)的参考轨迹,实线是感测位置(Z1 = ϕ A Vz )。可以知道,在主动阻尼(下图)中,存在具有小延迟的可接受的跟踪行为。在梯子的尖端()的偏转绘制在图8中,有源阻尼的改进是显而易见的。与不受控制的运动相比,振荡的振幅减小到约30%。摆动在基本振荡的一个周期时间内衰减,并且剩余梯的摇摆可忽略。在下图中。 如图8所示,由致动器激励的泛音是可识别的,因为绘制了应变计的纯传感器信号(转换成偏转)而不是估计状态。在下面的子图中,显而易见的是,通过关闭控制回路,与基本振荡相比,谐波获得了重量。然而,由于使用扰动观察器,这减小了谐波的幅度(参见图6),这种影响对控制器输出几乎没有影响。
Ⅵ.结论
在本文中,提出了一种用于火灾救援转台梯架的竖立运动的2自由度控制。对于前馈控制,基于差分平稳输出的模型反演被应用于梯形图的简单线性模型。反馈是根据时间导数变化的运动轨迹而建立的标量比例控制器。开发扰动观测器以消除梯子的高频振荡,这在控制器设计的模型中没有考虑,以避免闭环控制的不稳定性。控制
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137207],资料为PDF文档或Word文档,PDF文档可免费转换为Word

