
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
武汉理工大学
复杂路面状况下的电动汽车的全电动智能防抱死制动控制器
YU YiJun,WANG Yi,GAO ZongHe,FENG ShuHai,LI Feng.
摘 要:智能化防抱死制动系统是一种有待开发的应用在电动汽车上的新兴技术。它可以完全取代传统的机械式制动器,例如混合式ABS系统,这种系统不适合在电动汽车上使用。因此它极大改善了电动汽车的反应速度,缩短了制动时间,而且更容易整合在电动汽车的中央控制单元。它通过优化轮胎附着力系数获得最大制动力来改善制动性能。本篇文章用MATLAB软件中的Simulink模块分析检测ABS集成控制器,该模块是由基于有限状态机理论的传统PID连续模块和逻辑极限控制器组成。这两个控制器可同时调节滑差率和减速度,这样就可以有效的优化制动机能,并且可进一步改善ABS的安全性。包括车辆速度,车轮旋转速度,制动位移,压力状态,滑差率在内的ABS参数被用来表达ABS的性能。对于所有的电动ABS这种方式是简单并且适用的。更重要的是,它可以解决复杂路况上的制动问题,比如路况的急变。这种控制器可以有效地缩短制动距离和持续时间,也能加强ABS的稳定性,并且有应用在所有电动车上的潜力,1/4车的研究就是基于这种概念。
关键词:防抱死制动系统;全电动;智能ABS;电动车;机理论
1 引言
近年来车辆安全问题越来越被社会关注,尤其是随着汽车数目的增多以及速度的提高。对于车辆安全问题制动能力是最为重要的,尤其是在超长和路滑情况下,这会对人们的安全和财产问题带来巨大的损失。因此,制动器的稳定性在汽车行业变成了一个亟待解决的问题。防抱死制动系统被提了出来并且作为一个提高安全性,改善汽车制动性能的有效方式,它可以在遇到突发事件的时候有效防止汽车滑动和缩短制动时间。这个控制器是ABS设计中最重要的一部分。
传统的ABS包括控制单元、电磁阀、液压驱动系统和传感系统。目前,为了获得最优化的制动力和尽可能的减少制动距离,ABS的研究主要集中在控制算法,使用先进的控制算法获得最大值制动力和侧向附着系数。车轮加速度和轮胎打滑控制是ABS控制的两个主要因素[1]。第一种方式通过使用相关制动器使制动力与车轮加速度相吻合来间接控制车轮滑移[2]。第二种直接滑动控制有许多不同的方法,其中包括通过PID控制获得最大摩擦力[3],车轮滑移峰值定位[4],模糊控制[5-9]和神经网络控制[10],以及未来电动汽车的控制器[11,12]。通常,车辆控制系统设计中涉及的主要困难在于性能强烈依赖于取决于车轮滑移以及道路状况的轮胎/道路特性的知识[4]。滑移率在不同道路上被认为是不同的。绝大部分防抱死制动系统用滑移率衡量制动能力。来自传感器的一系列信号被输入计算单元,控制信号通过计算方法被输入电磁阀来控制液压系统的打开与闭合。控制算法和液压系统相结合,作为电子制动和机械制动方式,是最典型的ABS系统组成部分。
全电动智能ABS会被发展并且运用在电动车上,它可以去完全取代那些不适合用在电车上的机械制动器和混合制动器。本文讲述了车轮加速度和轮滑率的控制,因为它们已经被验证是一种改善车辆制动稳定性的有效方式。基于有限状态机理论的PID控制和逻辑极限控制分别被用来调节滑移率和车轮加速度[13,14]。两个控制器都是旨在获得稳定的和优化的制动器。文章提到的这种集成器是简单并且实用的。提出的集成控制器的输出逻辑信号,其可以直接是用于双向功率转换器的栅极驱动信号,以产生对电动机的正或负制动转矩。因此它是适合所有车辆上的电动防抱死制动系统。本文讲述了基于MATLAB的上坡下坡模型和仿真模型。用于构建集成控制器的Simulink /状态流模块可以将ABS的逻辑限制操作简化为可视图形,这也便于在进一步设计中对控制器进行调整和优化。新型ABS控制器将提高动态响应,减少反应时间和制动时间和距离,提高ABS制动效率,同时移除传统的机械制动部分,实现ABS的全自动控制。
模拟[16-17]是一种有效性的研究方法,其将用于评估所提出的控制器。
2 汽车模型
带有单个轮子的汽车模型如图1所示,图中风力,爬坡力和滚动阻力不考虑。滑差率公式:
(1)
图1 单车轮动力模型
这里是平移速度,是车轮速度,是车轮角速度,是车轮半径。
地面与车轮间的摩擦力表示为
(2)
是1/4车辆质量,是由于重力的加速度。是路面和轮胎之间的摩擦系数。根据牛顿的第二定律,单轮制动系统的动力学可以由以下等式表示
(3)
(4)
其中是直接施加到电动机的制动转矩,是车轮的转动惯量。当路面梯度因素被考虑进来,上下坡的动力系统模型如图2所示。
图2 单只车轮在坡度上的模型
下面的公式(6)和(7)分别用来表示车轮下坡和上坡状态。
(6)
(7)
Where (8)
(9)
3 控制算法
- 状态流和有限状态机理论
状态机是一个包含有限数量的模型,轮胎滑移率已经被发展为大部分防抱死制动系统的控制参数。在这次模拟研究中,期望的滑移率被设为典型值0.2,它会适合大部分车辆速度。以车辆理论模型为基础的车辆模型和滑移率的计算在第二单元已经被讨论。这个车辆上的参数从试验车上获得并且显示于表2中。控制系统的原理图显示在图5。
- 轮胎滑动控制
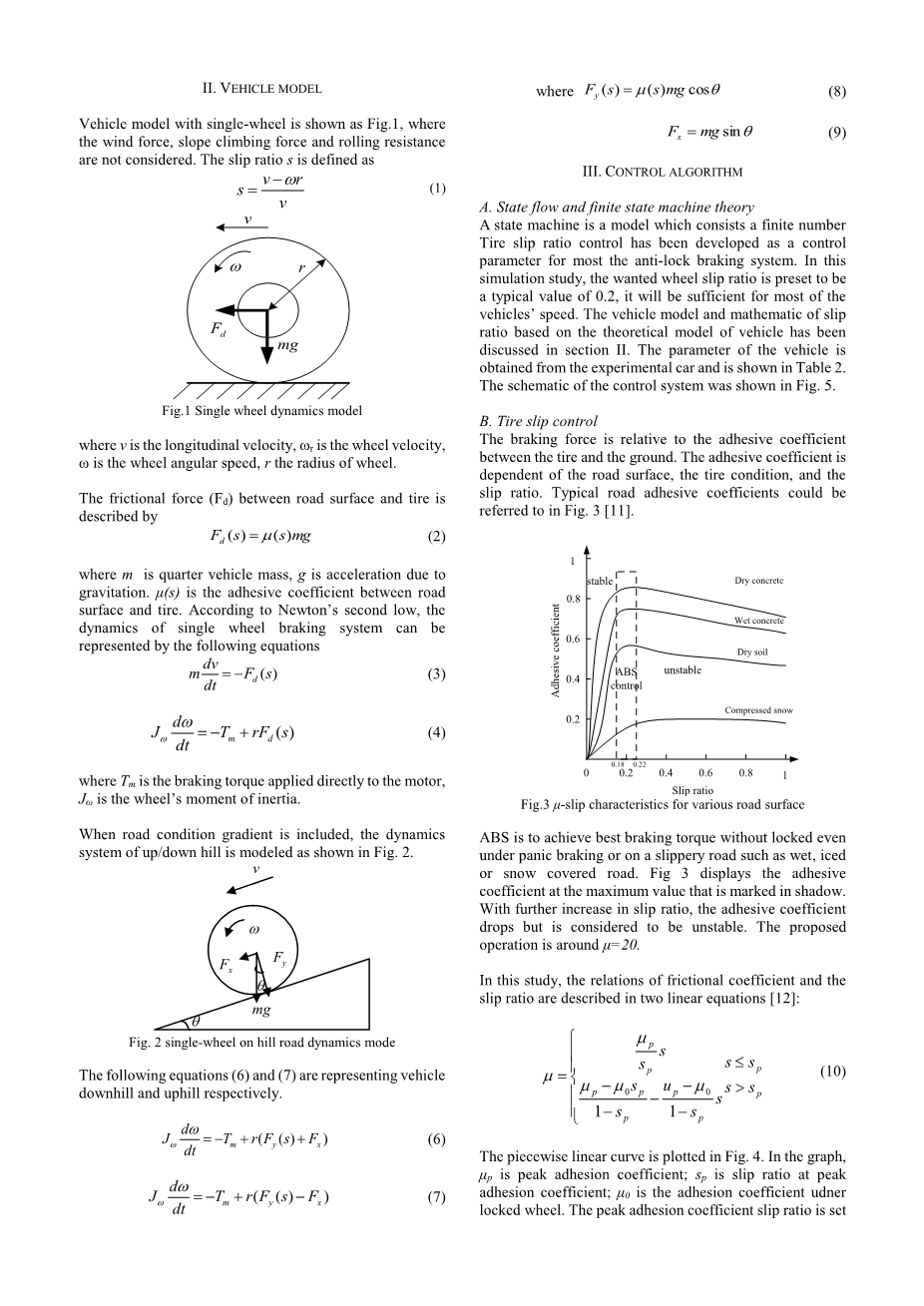
制动力和轮胎与地面的摩擦系数有关。摩擦系数取决于路面状况。轮胎状态,和滑移率。典型的路面摩擦系数在图3中被提到[11]。
图3 不同路面的滑移系数
在本次研究中,摩擦力系数和滑移率的关系用以下两个公式描述[12]:
mu; (10)
分段曲线绘制在图4中。图中,代表黏附系数峰值;是黏附系数峰值时的滑移率;是轮子抱死状态下的黏附系数。黏附系数峰值时的滑移率在本研究中被设置为0.2。表1显示不同路况下的特性。
图4 黏附系数-滑移率的分段曲线
表1 不同路况下的特性[13]
Road Condition Peak Adhensive Coefficient mu;p Slip Adhesive Coefficient mu;0
Dry concrete 0.9 0.75
Wet concrete 0.8 0.7
Dry soil 0.7 0.65
Compressed snow 0.3 0.2
图5制动系统仿真模型
车辆牵引控制器是为了优化制动力。无论什么路况这种优化最大化轮胎力。这种通过调节轮胎滑移率来获得最高路面黏结系数的能力。不过,这种参数随着路面和轮胎状况是不同的。这种设计是为了获得最佳轮胎滑动系数。
- 集成控制
这种防抱死制动系统包括一个集成控制器。它包含一个PID控制器并且建立在有限状态机理论上,这样可以同时调节滑移率和加速度。因为这种控制器适用于所有电动车ABS,双向功率转换器用于激励电机。有限状态机理论用于简化逻辑运算和输出双向转换器的栅极驱动信号。这一节中减速和滑移率是研究的主要控制参数。这种提出的控制算法在图6中显示。滑移率仍然是PID控制器最主要的控制因素,并且被调节到接近0.2。控制算法在3.2节提到。制动系统参数如下
表2.车辆模型参数
Parameters value paramenters value
Acceleration 9.8m/s2 peak adhesion 0.9
Due to gravity coefficient
Road gradient 0.15 Peak adhesion 0.2
Coefficient slip ratio
Wheel moment 9.55kg·m2 1/4 vehicle mass 300kg
of inertia
表.3 制动系统参数
Items value Items value
Acceleration 9.8m/s2 Peak adhesion 0.9
Due to gravity Coefficient
Road gradient 0.15 Peak adhesion 0.2
coefficient slip ratio
Wheel 9.55kg·m2 Adhesion coefficient
Moment of at Wheel locked
Inertia
1/4 vehicle 300kg Deceleration 20m/s2
Mass speed limit
Wheel rolling 0.3m Acceleration 20m/s2
radius
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137226],资料为PDF文档或Word文档,PDF文档可免费转换为Word

