英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
武汉理工大学
使用惯性延迟控制的集成转向和制动控制
摘 要 : 本文涉及改善重型车辆的乘坐舒适性和牵引力。 Skyhook模型实现主动悬挂系统。 Skyhook控制限制了弹簧上质量的运动,增强了乘坐舒适性。 使用惯性延迟控制(IDC)来提高系统的性能。 IDC用于估计系统中存在的不确定性以及干扰。 悬挂质量位置和速度用于设计控制律。 控制律的有效性通过在MATLAB / Simulink上进行仿真来验证。
关键词:主动悬架,Skyhook,延迟控制
1.引言
近年来,车辆具有用于稳定性和安全性的主要电子辅助。 在临界驾驶或操纵的情况下,如果驾驶员的转向和制动响应不正确,则存在车辆的不稳定性,即由于转向不足或过度转向而导致的滑动(牵引)或滚动的机会。 因此,为了克服车辆的旋转或漂移,开发了电子稳定控制(ESC)系统[1]。 这些车辆电子稳定性控制系统也称为偏航控制系统或电子稳定程序(ESP)。
目前,研究主要转向车辆动态稳定性。 这项研究包括由横向动态运动确定的车辆稳定性。 横向动态运动包括横摆稳定性,横摆稳定性是用于横向动态控制的方法之一,并且由车辆转向或制动或转向和制动系统的集成来执行。
已经对车辆的横摆稳定性进行了大量研究。车辆的稳定性取决于车辆参数,例如侧滑角,横摆率和横向加速度。增益计划主动转向控制[2]在极端处理情况下的2DOF车辆模型。讨论了基于用于主动转向和差动制动的线性矩阵不等式(LMI)的静态状态反馈控制器[3]。通过将转弯刚度,制动刚度和车辆速度作为不确定性考虑用于车辆动态控制(VDC)的静态状态反馈控制器[4]。参数不确定性影响车辆动态系统的稳定性,克服这一点,主动前转向与动态偏转控制滑模控制(SMC)[5]被设计。提出了一种集成的车辆底盘控制器来协调转向和制动[6]。稳健的滑动模式控制器被设计用于跟踪偏航率。通过主动前转向(AFS)和动态偏航控制(DYC)协调的最优保证成本控制理论[7]降低了轮胎转弯刚度变化的影响。 2DOF车辆模型被用于具有干扰观察器的高级车辆以改善车辆稳定性和可操作性。直接测量线性轮胎力,并用于控制横摆率和侧滑角。基于的LQR控制器[8]被设计和实现用于使用主动前转向和直接偏航力矩控制来跟踪车辆的期望状态。模型预测控制[9]被设计用于跟踪期望的状态,以提高车辆的机动性和稳定性。设计了横摆稳定性控制,并且转向控制器[11]被设计成通过使用频域混合灵敏度约束来增强横摆稳定性。偏航稳定性可以通过主动转向控制或主动转向控制或直接偏航力矩控制或主动转向和直接偏航力矩控制的整合来实现。在直接横摆力矩控制中,期望的横摆力矩由控制器产生以控制车辆横摆率和侧滑。通过主动制动或主动差动扭矩分配在车辆中采用该横摆力矩。在主动转向中,通过将校正转向角添加到驾驶员的转向角来实现车辆的期望侧滑和横摆率。校正转向角由设计的控制器产生,并且通过使用不同的机构(例如使用双行星齿轮或线控转向系统)而在车辆中使用。为了车辆的稳定性,有效地控制横摆力矩和侧滑是必要的。本研究使研究者的目标是集成主动转向和直接偏航力矩控制的设计。如所讨论的,存在参数不确定性和对车辆的干扰的不期望的影响。基于IDC的滑模控制器[12]被设计用于干扰估计。
本文的重点是跟踪车辆的期望侧滑和横摆率,以增强车辆在关键操纵的稳定性,以防止车辆打滑或漂移。 控制被设计用于状态的参考跟踪,并且使用IDC估计参数不确定性或干扰。 使用MATLAB / Simulink验证结果。
文件的组织如下:第2节描述了两个自由度车辆建模和轮胎建模。 第3节描述了基于惯性延迟控制器的控制器和扰动估计的设计。 第4节描述模拟结果。 在最后一节第5节中说明了结论。
Ⅱ. 车辆和轮胎建模
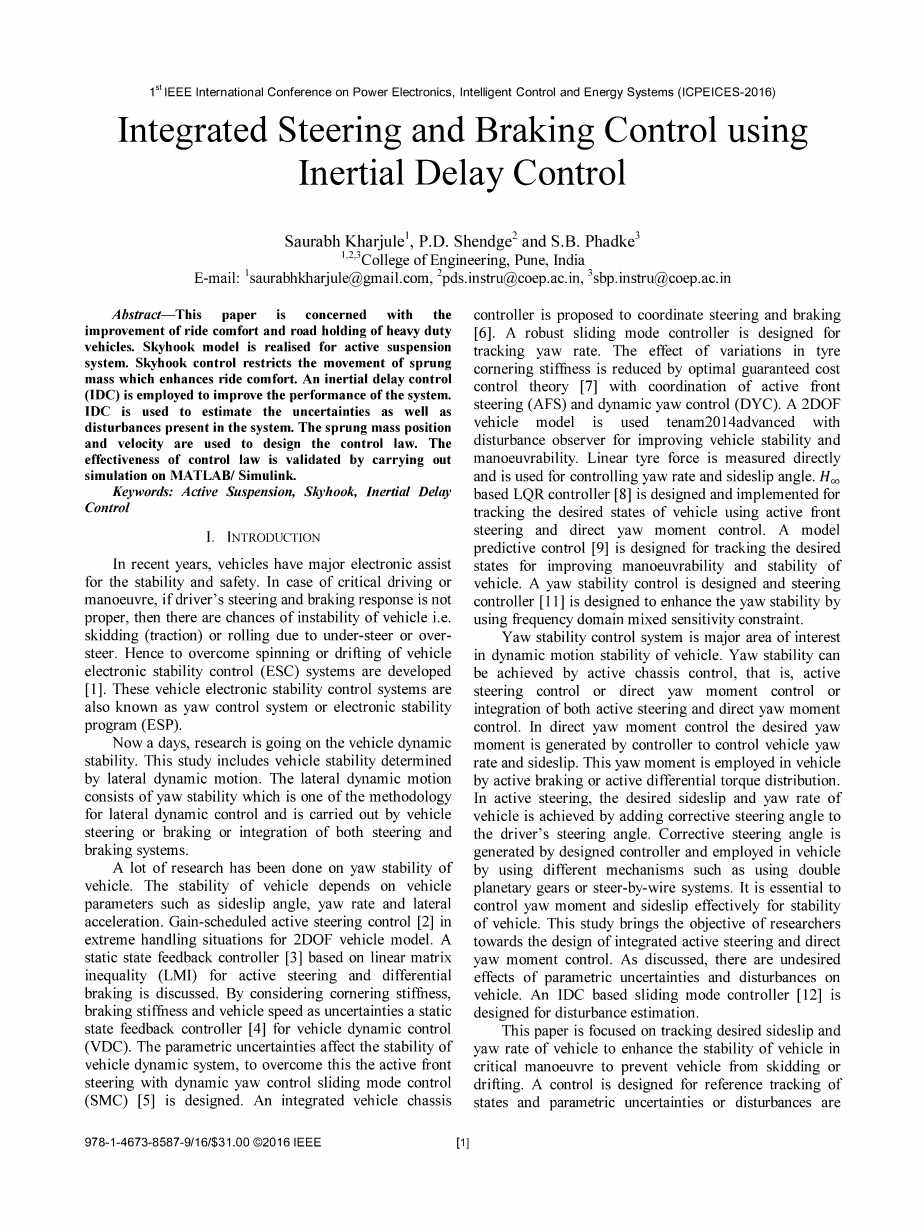
对于控制器设计,考虑2DOF车辆动态模型。 在2DOF车辆模型中,两个自由度由横向位移y和偏航位置表示
Figure 1单轨自行车模型
A. 2DOF车辆模型
在2DOF车辆动力学模型中,前轮胎和后轮胎都被认为是统一的,如图1所示。在重心应用牛顿第二定律
(1)
根据重心保持z轴的动量守恒定律
(2)
其中,车辆质量为m,和分别为横向和纵向速度,是在前面产生的横向轮胎力,是在后轮胎处产生的横向轮胎力,是输入转向角,是转动惯量 ,是重心距前轴的距离,是重心距车辆后轴的距离,是外部偏航力矩,是车辆的横摆率。
B.轮胎建模
在前轮和后轮处产生的侧向轮胎力对于转弯是必要的。 对于线性轮胎模型,所产生的侧向轮胎力的值与轮胎的侧偏刚度成比例并且由以下公式给出
, (3)
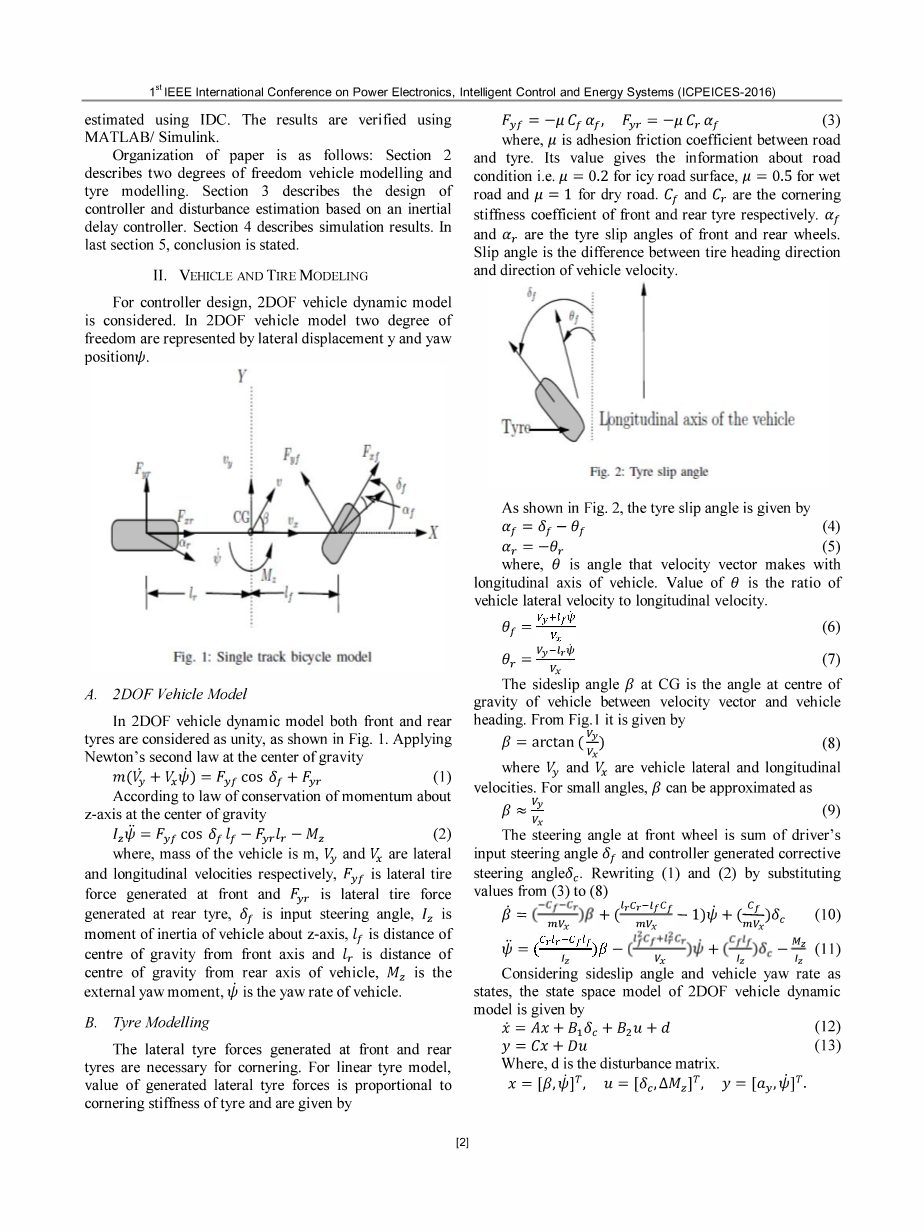
其中,是道路和轮胎之间的粘附摩擦系数。 其值给出关于路面状况的信息,即对于冰路面= 0.2,对于湿路面= 0.5,对于干路面= 1。 和分别是前轮胎和后轮胎的转弯刚度系数。 和是前轮和后轮的轮胎滑移角。 滑移角是轮胎前进方向和车辆速度方向之间的差。
Figure 2轮胎滑移角
如图2所示,轮胎滑移角由下式给出
(4)
(5)
其中,是速度矢量与车辆纵轴的夹角。 值是车辆横向速度与纵向速度的比值。
(6)
(7)
CG处的侧滑角是车辆在速度矢量和车辆航向之间的重心处的角度。 从图11给出
(8)
其中和是车辆横向和纵向速度。 对于小角度,可近似为
(9)
前轮的转向角是驾驶员的输入转向角和控制器产生的校正转向角的总和。通过代入(3)到(8)的值来重写(1)和(2)
(10)
(11)
考虑侧滑角和车辆偏航率作为状态,2DOF车辆动态模型的状态空间模型给出
(12)
(13)
其中,d是扰动矩阵。
(14)
(15)
在本文中扰动被认为是转弯刚度的不确定性和车辆质量的变化。
C.参考模型
如所讨论的,主动前转向和直接偏航力矩控制的主要目的是跟踪状态的期望值,即,车辆的侧滑角和横摆率。 横摆率的期望值取决于驾驶员的转向角并且由下式给出
(16)
(17)
其中,是车辆稳定性参数。的符号描述了车辆在转弯时的特性行为,即车辆正经历转向不足或过度转向或中性转向,如下文:
: 转向不足
: 中性转向
: 过度转向
对于车辆的转弯稳定性,侧滑的期望值应该为零
1)用于跟踪偏航率和侧滑的控制器设计
本节描述控制器的设计,以最小化车辆状态和期望的状态值之间的跟踪误差。 错误动态描述为
(18)
(19)
(20)
(21)
主要目标是最小化跟踪误差。 此外,干扰的影响使状态偏离期望值。 为了减少跟踪误差,使用惯性延迟控制器。 控制律被设计为消除干扰的影响并减少跟踪误差。 IDC用于估计干扰。 IDC通过利用系统最近的过去信息来估计干扰和不确定性。 在IDC中,干扰通过宽带滤波器以获得其估计。
(22)
(23)
其中,是扰动d的估计。是滤波器时间常数,例如,gt;0.将控制输入设计为
(24)
其中,是用于否定(21)中的已知项的控制的分量。
(25)
k是用户选择的常数,例如kgt; 0。 从(21),(24)和(25)得
(26)
现在设计为
(27)
由(26)知
(28)
从(28),随着变为零,跟踪误差也达到零。 对干扰d进行零估计应该是精确的。 从(23),(26)和(27)我们得到
(29)
III. 模拟结果
所提出的控制算法的性能被模拟用于集成底盘控制,即用于主动前转向和直接偏航控制。 为了模拟目的,考虑不同种类的标准转向信号,例如双车道转换(DLC),鱼钩操纵和J转弯操纵。 车辆参数在表1中描述。考虑具有mu;= 0.4,即轮胎转弯刚度的40%变化的滑路面。 k = 40的模拟结果显示了更好的偏航率和车辆侧滑的跟踪。
结果表明车辆偏航率和侧滑遵循偏航率和侧滑的期望值。 干扰和估计干扰之间的差异非常小。 轮胎转弯刚度和车辆质量对车辆状态的影响不大。
IV. 结论
在本文中,控制被设计为通过使用惯性延迟控制来避免参数不确定性和干扰的影响。 偏航率负责容易操纵和侧滑是负责车辆在关键机动的稳定性。 通过使用所提出的算法,实现了跟踪状态的主要目的。 基于IDC的提出的算法有效地估计车辆模型中的不确定性。 因此改善了车辆的机动性和稳定性。 集成的转向和制动控制改善了状态的跟踪。 产生的控制是校正转向角,其负责主动转向和由差动制动产生的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137232],资料为PDF文档或Word文档,PDF文档可免费转换为Word

