以下翻译摘自lt;lt;Chassis System Design Methodologygt;gt;,August 5,2005.P11~19
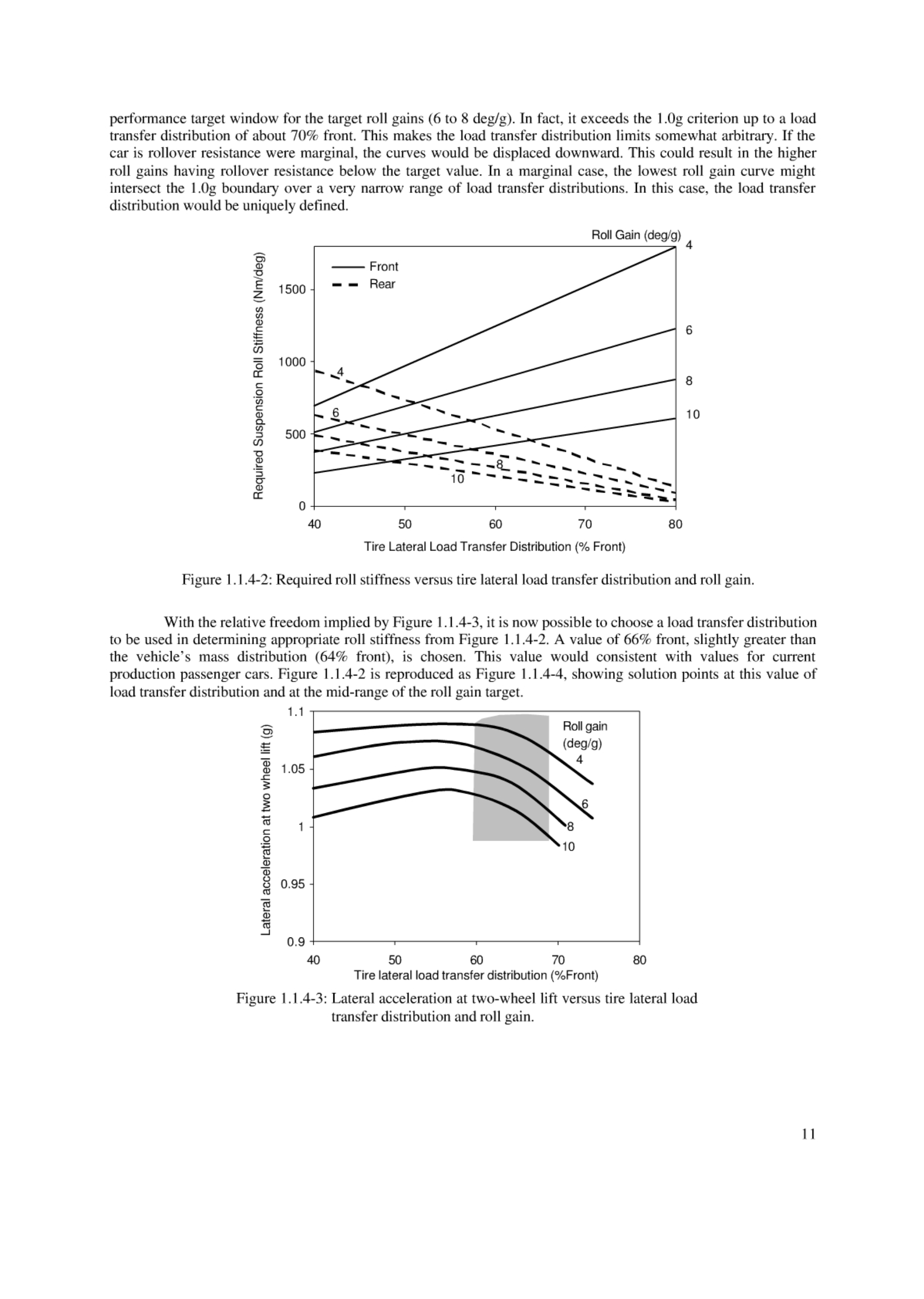
实际上,它超过了标准载荷1.0g传递分布前轴的70%,这使得载荷传递分布限定有些随意。如果汽车的滚动阻力忽略不计,曲线会呈下降趋势,这可能导致滚动阻力在更高滚动增益时处于目标值下。在忽略不计的情况下,最低滚动增益曲线可能和1.0g标准载荷边界相交于载荷传递分布在一段窄小范围内。这种情况下,载荷传递分布被唯一定义。
根据图表1.1.4-3的相对自由度指出,选择一种载荷传递分布用于确定图表1.1.4-2中的转动刚度在现在已经成为一种可能.选择前轴载荷占车辆总质量的66%略优于64%。这个值与当前的乘用车产品一致。图表1.1.4-2与图表1.1.4-4类似,给出了在这一值下的载荷传递分布和滚动增益目标中间范围的解值点。
滚动模态综合法是由决定稳定杆直径相关的滚动刚度要求简单概念性步骤推断出来的。尤其是在和一系列假定的稳定杆直径下的运行悬架分析项目中。它们的结果之间的关系如图1.1.4-5和1.1.4-6所示,点画线表示的是钢板弹簧独自产生的滚动刚度。稳定杆仅仅添加上滚动刚度的最小值。这表明了优先得知弹簧刚度以确定稳定杆直径的重要性.符合预期的滚动刚度的值点如图所示。
1.1.5横向动态模式
第三和最后阶段的合成在两个方面尤为重要,它精确的表明了汽车的精准控制方面并且高度重视充气轮胎与转向系统的重要组件的属性。作为初级目标,横向动态模式致力于标定准确的轮胎系数,这对于达到重点精确控制特征是十分有必要的。作为第二目标,它致力于标定的最重要的方面有转向系统和过度转向比(假设是常数)。早期模式的结果随着新事物的发展建立,会被集成为该值。
横向动态模式有三个操作变量,如表1.1.5-1所示。尽管不足转向(不足转向梯度)能够影响其他两项操作变量:横向加速度90%的响应时间和转向灵敏度。但是在速度和其他因素的干扰下,对转向灵敏度的变化很难客观的去评价。响应时间是指要求横向加速度达到在一系列转向输入后的稳定状态值的时间的90%。其值取决于司机能够直观的判断感觉到汽车迟钝或是过快。转向灵敏度是指在某一给定速度下横向稳态加速度的变化与转向角的比值。汽车横向加速度在某一转向角是的响应大小也可以由其决定和被司机直观判断。一般速度较快或是跑车的转向灵敏度值都很高,它们在传统上但却是错误地被称为快速转向。假设三个操作变量被定义在汽车的线性范围内(轮胎横向作用力下的横向加速度的范围是接近偏离角的线性方程),大多数车在0到0.3g之间,或是一些高性能的车能达到0.5-0.6,除此之外,响应时间和转向灵敏度都是设想在实际高速下定义的,一般车速为100km/h。
由于不足转向时底盘合成工艺的基础,其他相关论述也符合规程.选择不足转向作为一项操作变量可能会造成手工设计和动力转向上的两难。利用增加不足转向十分容易获得较短的横向加速时间。增大不足转向性,在低总转向比时能够高效率的达到高转向灵敏度。这些低转速比与动力转向兼容,但与手动转向不兼容。有三种方法可以解决这种两难,设计者可以选择一个折中的不足转向标准,以适应各种转向系统以期达到最大的市场销售占有率,或是找到一种方法去改变不足转向性去适应各类转向系统。如果动力转向最受欢迎,这项分析可以利用第二种方法。
应用在这些变量上的局限性是不足转向性的高低边界和转向灵敏度以及响应时间的最上限。前面的这些限制都是在一系列相关的汽车性能上测量的。
随后的讨论包括侧偏柔度概念的应用。这在汽车动力学中是一个强大的概念,它允许前后悬架的不足转向性能分开作用,因此简化了合成步骤,也简化了不足转向的定义。因此前后侧偏柔度在确定时首先取决于设计变量,如表1.1.5-1所示。大部分其他的设计变量取决于侧偏柔度,或是在合成时,能够由它们确定。例外是汽车惯性和转向系总传动比.它们都不受不足转向性或是侧偏柔度的影响;它们是与响应时间和转向灵敏度相关的设计变量。
综合前后侧偏柔度能够确定可运作载荷下的轮胎系数,这四个相关变量(前后轮的各两个系数)如表1.1.5-1所示,余下相关变量和转向系总传动比的确定不相干。
如前,余下的相关变量相互独立,根据1.1.5-1所示,并没有太多。但是,需要重视的是它们中有相当一部分是由原始模式提出的。至于新的,被悬架的动力学阻挡,只能在悬架滚动转向系数上知道。 汽车惯性和轮胎外倾刚度必须在可用的数据下预估。悬架的转向平顺性可用差不多接近,但最好是通过已知悬架的分析估计(假设为轴衬刚度)。
这使设计和横向动态的操作变量有了大致的轮廓。在给出模式解决方案前的余下任务是关于侧偏柔度概念的简短讨论,图1.1.5-2显示了基本概念,左边的图表明速度向量(和)与前后轴中心有关。它们大小相同,方向不同。每个速度都是参考当地的侧滑角和.后轮速度的参考物是汽车的对称面,对应前轮则是前轮转向角,正如转向角和转向系统动力学所表明的那样(在一恒定转向系总传动比时,转向角会被比率分配)。右图显示了侧滑角是怎样随稳态横向加速度变化的,它们是汽车线性范围内的线性关系,坡度即为侧偏柔度:
不足转向系数K被定义为:
(1-6)
其中和是前后侧偏柔度,可定义为
和 (1-7)
侧偏柔度取决于轮胎和悬架特性,以及它们的相互作用。但轮胎侧偏系数在规定载荷内往往大部分取决于每一个侧偏柔度。在值被确定后,它们的合成可分开别集中于和。它们会将不足转向以及响应时间目标处理后建立侧偏柔度,随后确定相应的轮胎刚度系数。
汽车定向动态分析表明响应时间取决于后侧偏柔度和平直路面的不足转向性。图1.1.5-3是根据计算机仿真汽车质量,惯性和合成设计的悬架特性得来的。侧偏柔度会系统性的变化以便提供后轮侧偏柔度和不足转向性的定向增长的值。曲线簇表明给定相应时间内和K会产生一系列组合,但是利用建立响应时间与不足转向性的限制可以建立目标值域。如图1.1.5-3中的阴影部分所示,是根据性能限制得来的:
响应时间lt;0.40s
4deg/glt;不足转向性lt;6deg/g
这个值域表明可行性后轮侧偏柔度范围为0-5deg/g,选择一个很小的值来指定一个很大的侧偏系数得到的值不切实际,选择最大值5deg/g来支配最高不足转向性就可以。图1.1.5-3显示,在不足转向标称值与响应时间上限值的合理折中得出结果,这要求后轮侧偏柔度为4.5deg/g。
现在仍需要确定怎样使侧偏柔度达到此值.经过大量的研究,发现通常只有四项显得尤为重要,它们是:
(1)轮轴所承受的轮胎侧偏系数与质量;
(2)侧倾转向和滚动增益;
(3)轮轴所承受的侧偏力侧倾转向和质量;
(4)正回正力矩侧偏转向和调整系数(调整刚度系数).
其中,最重要的是侧偏系数.正如所讨论的那样,这是最有吸引力的相关设计变量,其它的排序取决于悬架类型。设计悬架时提供合适的滚动不足转向性是最常规的操作,没有合适的方法使响应干扰减弱或存在较大的值使小轮胎具有低的侧偏系数,尝试一些小侧偏力变形不足转向和减小回正力矩变形过度转向都是正常的尝试。
假设这些能够成功,后轮侧偏柔度和侧偏系数之间的关系被限定。这种关系的发展通常需要车辆的计算机处理模型。它在目标增益和侧偏及调整系数范围内必须能够运行起来,轮胎系数和调整系数都能影响后轮侧偏柔度,但通常情况下,后者作用小一点。变量有一个差不多的选择范围如图1.1.5-4,它显示了设计车辆样本轮胎合适的调整系数随垂直载荷的变化趋势与分布。后轮操作载荷的系数范围在图1.1.5-5上显示和应用,在这种情况下,由于后悬架的设计,调整系数的影响可忽略不计。
图1.1.5-3给出了叠加要求下的侧偏柔度值点,要求侧偏系数值为0.233deg。由于系数会随载荷变化,这个值只在后轮操作载荷上有效。如图1.1.5-5所示,在这一载荷下,调整系数没有实用性的要求。
后轮轮胎系数要求的建立同样可适用于前轮,接下来的程序基本相似。首先,如图1.1.5-4,在前轮载荷下建立合理的调整系数范围,利用精确操作仿真建立前轮侧偏柔度与侧偏系数的关系,但此时随高值增加侧偏柔度的调整系数的值至关重要。
再次,要求侧偏柔度必须叠加以确定轮胎系数.这个值根据后轮侧偏柔度(4.5deg/g),不足转向目标值(标称值5deg/g),由等式(1-8)得出.要求侧偏柔度为:
g (1-8)
根据此值,图1.1.5-6显示前轮侧偏系数在0.172到0.190deg/g之间,取决于调整系数的值。综合法在这一环节的最后任务是使两系数在要求的前轮侧偏柔度下和彼此一致,观察在轮胎里作用下的趋势和移动现象。
图1.1.5-6的目标侧偏柔度生动的调整系数与侧偏系数的兼容关系,它们决定了如1.1.5-7的图线,显示了在满足侧偏柔度标准的条件下两系数之间的关系。这种关系的叠加是来自测量轮胎数据的一系列系数值,它们必须在每个前轮胎的操作载荷为476kg时被估量,额外的信息允许图线结果的选择,它是与观察的轮胎性能一致的.选择系数点7.4mm/deg和0.183deg。
在这个点上,要慎重的检查所有的轮胎系数以免与轮胎性能观察趋势相悖。图1.1.5-8和1.1.5-9表明侧偏系数与调整系数的叠加范围在,在允许载荷内。值得注意的是由于汽车有标定不足转向和响应时间,侧偏系数要在两个值上呈现,在载荷上呈现,调整系数必须有值在前轮操作载荷上显示。在设计上,由于调整系数不影响后轮侧偏柔度,它的值在后轮载荷上没有那么重要。
作为这个模式的最后一步,与最后的性能变量有关的相关变量,转向灵敏度,可以被确定了。基本车辆动力学理论上表明转向灵敏度取决于在某一速度下的不足转向,轴距和转向系总传动比。现将不足转向度定为5deg/g,轴距已知,这意味着转向系总传动比是唯一的相关设计变量。这些变量的关系式为:
(1-9)
其中,S为转向角单位为g/100的转向灵敏度,G为转向系总传动比,L为轴距(m),u为速度(m/s),K为不足转向度(deg/g)。
这个等式的值被绘制在了图1.1.5-10上,显示了转向系总传动比随不足转向度和转向灵敏度的函数变化。
给定不足转向度一目标值(4到6 deg/g)和转向灵敏度(0.8到0.9 g/100deg),可以选择一转向系总传动比值来适应这个目标值。解出来的值点必须在阴影范围内,选择值域的中点(15.3:1)。
完成侧向动态模式的最后一步与设计综合。由于所有的性能目标和相关设计参数限制已经都注意到了,设计可以如设想的进行处理.接下来要确定的是样板的性能测试。
1.2 悬架运动属性
1.2.1 束角
[束角的背景]
前后悬架的动态束角特征会影响汽车的处理响应,当轮胎进入振动时,接近外胎的动态会反振回来。当进入反弹阶段时,接近内胎的会反回来.轮束外倾的大小通过振动影响前悬架动力学不足转向的大小。
[定义]
束角是指车身直行时车轮转向角的大小,正束角是朝z轴方向绕中心转动的角度。
单位:静态轮速内倾度,束角坡度是deg/m。
[束角类型]
束角类型或者束角曲线可以说是悬架结构中最重要的一方面。车轮进入振动或
剩余内容已隐藏,支付完成后下载完整资料

英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138807],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

