
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
基于的汽车盲点检测雷达系统的设计与开发
摘要:传统的2D-FFT的目标检测方法是通过FFT(快速傅里叶变换)和CA-CFAR(单元平均恒虚警率)的检测来进行计算和浏览所有范围内的多普勒细胞。这种办法计算复杂度高,处理时间长。本文基于ROI预处理方案开发了一个24GHZ的FMCW(调频连续波)雷达的盲点检测系统,该系统是一种低复杂度的目标检测体系。在真正的盲区,被检测的汽车数量是有限的。这个系统只提取它们速度对应的范围,那个范围会有真正的目标出现。此外,在相同的范围,存在不同速度的汽车的概率是很低的。因此,在这种方法当中,一些高强度的只适用于CA-CFAR(单元平均恒虚警率)进行检测,这种方法相比于传统的2D-FFT方法,这种方法可以显着减少要处理的数据量,从而增加了处理的时间。我们开发了一个24 GHz FMCW(调频连续波)雷达系统,该系统由收发器、天线和信号处理模块组成。所设计的算法在信号处理模块中的一个微型微处理器中工作。在消声室和实际道路当中通过开发的24 GHz FMCW雷达系统来实施我们的算法,我们证明在盲区的汽车范围和速度都可以被检测到。与常规方法相比,该方法的所占用的时间仅为原来的52.4 %.
关键字:汽车雷达,盲点探测雷达,盲点检测,调频连续波雷达,低复杂度
1.简介
现如今,驾驶辅助系统已成为智能交通系统中最重要的关键技术之一,可以有效地减少交通事故的数量(林等人,2012)。高速公路上的车辆事故是非常危险的,因为大多数汽车都是在高速和短距离区间行驶的。在高速公路上,当当前车道堵车时,他通常从目前的车道变换为一个空车道,即使他们处于同一车速(林等,2012)。在这种情况下,当目标车道不空时,会发生致命的交通意外。因为视角的限制,车辆的两个侧镜不能帮助司机观察的相邻车道的确切情况(林等人,2012)。在高速行驶的高速公路上,车辆碰撞会导致非常严重和危险的情况,从而导致连续撞车事故,同时在城市地区,司机尝试改变车道和转弯多次驾驶。
在这两种情况下,驾驶员如果没有意识到盲区的车辆时,就会导致车辆意外和受伤,以及随之而来的交通挤塞。
为了避免碰撞事故的发生,一些车辆已经安装了盲点检测系统。盲点检测系统有助于司机意识到盲区的车辆。
近日,两个基于盲点检测系统的主要技术已经发布:雷达和摄像头传感器在后视镜或在汽车的后部(蕨类aacute;费尔南德斯等人 洛杉矶,2013)。
盲点监测系统采用摄像头的一个典型的例子就是沃尔沃的盲点信息系统。
与雷达传感器相比,相机价格便宜,但在恶劣的天气条件下,如雨,雪,大雾等非常敏感。为了克服这一限制,图像处理可以采用多种方式如光流分析或模式识别(Orsquo;Malley et al.,2010)。
雷达基于盲点检测系统的很好的例子是奥迪侧向辅助系统,梅赛德斯-奔驰的主动盲点辅助,和英菲尼迪的盲点警告。特别是,使用雷达基于盲点检测系统也增加了其他的防追尾碰撞应用,如LCA(车道变更辅助)系统、RCTA(后方来车提醒)系统和PAS(泊车辅助系统)。用一个雷达传感器支持多种功能,在大多数车辆,基于盲点监测系统的雷达传感器安装在车辆的后保险杠(叉 enbrock等人,2014年)。
与视觉传感器相比,无论天气或道路条件如何,雷达传感器可以保证系统的可靠性。而且由于汽车雷达传感器可以提供位置 和速度的目标对象,接近车辆的盲点区容易区分(郑某等人,2012)。
高密度芯片的雷达收发器已经被开发,设计紧凑,成本低廉。因此,在未来,对于驾驶员辅助系统,雷达传感器和相机传感器将十分重要。
一般来说,FMCW(调频连续波)雷达已用于汽车雷达(Jeong et al.,2012)。在调频连续波雷达上,通过发射源和接收信号之间的频率差来检测范围和速度。由于接收到的拍频信号的带宽可以减少到少于12兆赫,相比于脉冲雷达,无论传输的带宽,信号处理部分的硬件复杂度可以降低。(理查兹,2005;李和基姆,2010)。
FMCW调制方案是一种有效的方法,但这种方法对于多目标的情况下关于距离和速度的分离会产生歧义(俊,2004;温克勒,2007)。为了解决这些问题,一种基于FMCW雷达快速斜坡方法已被提出(俊,2004;温克勒,2007)。在该方法中,通过FFT(快速傅里叶变换)处理,每一个斜坡主要是提取目标距离信息。接下来,多普勒频率是通过在PRI(脉冲重复间隔)在各距离单元离散数据的附加FFT处理得到,其中包括二维地图的范围和多普勒频谱完成。最后,为了从范围多普勒地图获得的范围和速度的目标,CA-CFAR(单元平均恒虚警率)的检测在每一个范围的多普勒方向进行(温克勒,2007)。
在使用快速坡道2D-FFT处理是基于目标距离和速度的一种有效的检测方法,相关的计算非常多。由于二维多普勒地图所有的单元都要扫描,尤其对CA-CFAR检测处理,整个处理时间可以大大增加。
检测区很窄,汽车和雷达应迅速向司机提供可靠的目标信息。因此,所需的信号处理时间极短。此外,在汽车雷达上,低成本的微处理器的信号处理模块是必需的,目标检测算法的计算复杂度也是很重要的。
因此,在本文中,我们设计了一个低复杂度的目标检测架构。我们还开发了一个24 GHz的盲点检测系统。
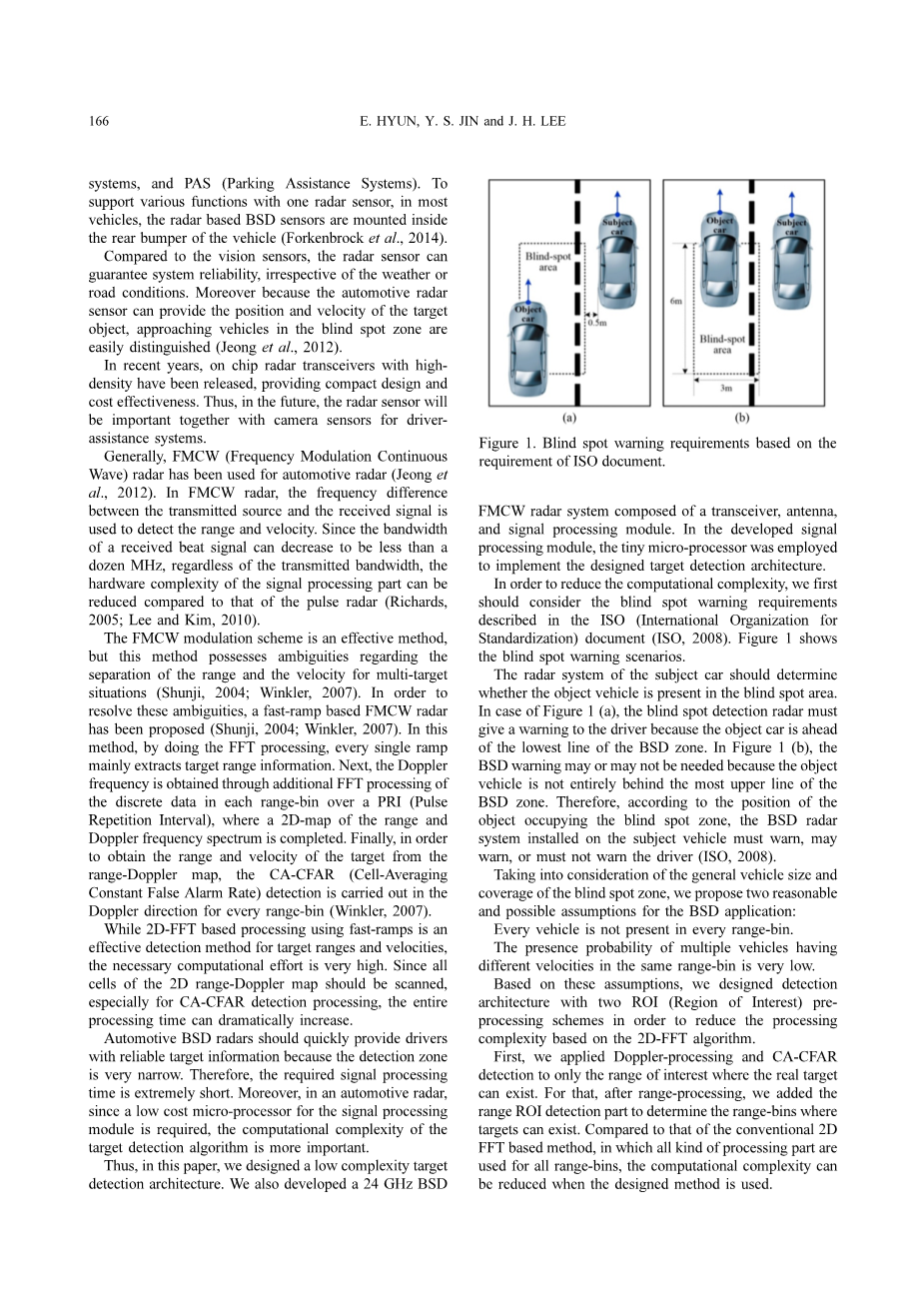
图1。基于ISO文件要求的盲点预警系统。
FMCW雷达系统由收发器、天线和信号处理模块组成。在开发的信号处理模块,微型微处理器被用来实现目标检测架构的设计。
为了减少计算复杂度,我们首先应该考虑在ISO(国际标准化组织)文件中描述的盲点警告要求(ISO,2008) 。图1显示了盲点警告方案。
主题车的雷达系统应确定目标车辆是否存在于盲区区域。如图1(a),盲点探测雷达必须警告司机,因为对象的车前面已经越过了盲点监测区域的最低线,图1(b),BSD可能会或可能不会警告,因为车辆并不完全在BSD区最上一行。因此,根据占据盲区区域的物体的位置,安装在主题车上的BSD雷达系统应该具备警告或不警告司机的功能(ISO,2008)。
考虑到一般的车辆大小和盲点区域覆盖的要求,我们提出了关于BSD合理而可能的假设:每辆车都不存在在每一个范围内。在同一个范围内的不同速度的多个车辆的存在概率是非常低的。基于这些假设,我们设计的检测体系结构具有两个ROI(感兴趣区域)的预处理方案,以减少基于2D-FFT算法处理的复杂性。
首先,我们应用多普勒处理和CA-CFAR检测到感兴趣范围,真正的目标是可能存在的。对于这一点,经过范围处理,我们增加了范围ROI检测部分,以确定范围的垃圾桶,目标可以存在。相比之下,基于传统的二维FFT,其中各种处理部分用于所有范围内的垃圾箱,可以降低其计算复杂度时的设计方法 。
接下来,我们在CA-CFAR检测之前增加了多普勒ROI查找函数功能。在之前的方法当中,CFAR检测器扫描二维地图的所有单元,以确定是否每个单元是否是目标。然而,在所设计的方法中,只有多普勒ROI单元才用CFAR检测。
从处理时间的角度来看,与传统的方法相比,所设计的方法可以减少所需的时间,因为扫描的数目减少。由于总加工时间的减少 处理时间最终会提高事故预防的盲点区的潜力,该方案对于盲点监测系统系统是非常有用的。
在第2节,提出了传统的 2D-FFT检测方法。在第3节,介绍了设计目标检测方案和雷达中的应用。第4节介绍了处理复杂性的考虑。在5节,给出了开发和实现的结果。第6节提出在消声室中的实验结果和实际道路。在第7节,从我们的研究结论和今后的工作方向。
2.传统的基于2D-FFT检测概述
根据快速斜坡的调频连续波雷达(顺,2004),对发射波形如图2所示的频率时域图(一),这里,B是带宽,T是脉冲重复周期。基于2D-FFT的信号处理方案可分为三个步骤,如图2(b):距离处理部分、多普勒处理部分和CA-CFAR检测部分。
整个处理过程如下:
- 距离处理部分
- 接收到的信号被数字化的ADC(模拟数字转换器)和FS采样频率。
- 样本{ SR(S,L),S = 1 ~ S,L = 1 ~ L }由N点FFT转化成每个斜坡内的频域 为了产生目标范围的频谱。在这里,S是在一个匝道的样本大小,L是在一帧时间的斜坡数。
- 所有提取的光谱范围内{ RR(n,l),n = 1 ~ N,L = 1 ~ L }也存储。在这里,n是每个斜坡的范围箱的数量。
- 多普勒处理部分
- 多普勒频谱图(N,m),N = 1 N,m = 1通过M点FFT在相邻斜坡的序列上处理成一个单一的范围并保存。
- CA-CFAR检测
- 一般来说,在2D范围多普勒地图,CFAR检测可以在多普勒谱直接做。这是因为在实际情况下,一个多普勒频谱的目标数是比较少的(温克尔 R,2007)
图2。一种基于FMCW雷达快速斜坡的概念:(a)发送波形的时域图;(b)目标检测程序
因此,n的范围本多普勒幅度谱选定为测试单元如(RD(n,1))2 ~(RD(n,m))2。
- 使用滑动窗口可以对每个测试单元依次扫描。在同一时间,相应的阈值可以通过平均和缩放的参考单元进行计算。这里,参考单元由一个窗口中的测试单元的左右两侧的单元格组成。
- 当测试单元的幅度大于某一阈值时,测试单元可以被确定为目标。
该程序一直执行直到一个多普勒谱上的测试单元全部被浏览为止。该程序一直被重复直到所有的测试单元都被选择。
3.设计目标检测方案在BSD雷达中的应用
传统的基于2D-FFT的目标检测方法来生成整个2D范围多普勒地图。此外,在CA-CFAR处理、二维地图的所有测试的单元应该扫描。这结果计算复杂度高。因此,在本文中,我们根据ROI预处理方法为盲点探测雷达设计了一个低复杂度的目标检测方法。
为了做到这一点,在考虑BSD预警要求、狭窄的盲点区域和一般车辆的大小,我们提出了两种合理假设如下S:
首先,每一个目标不存在在每个范围。即在BSD区,检测到汽车的数量是有限的。
其次,在同一个范围内的不同速度的多个车辆的存在概率是非常低的。
为了解释该假设BSD雷达中的应用,我们说明了两个基于BSD区的例子和一般汽车大小。
图3.多台车辆同时占用盲区区域的实例。
图3(a)表明,在不同的范围内被检测到的车辆的最大数量是约5。在这种情况下,由于多个散射可以从一辆车的体现,检测范围本 S可以超过真正的汽车数量。下一步,图3(b)显示驾驶汽车在同一距离被检测到,并且它们的最大数目也是5。
然而,在现实中,我们预计,在盲区区域的车辆的数量是小于5,因为有一个实际的行驶间隔之间的移动汽车。
这两个合理的假设,如上所述,到目前为止,为了BSD雷达系统,降低目标检测处理的复杂性的。于是,我们设计了盲人光斑检测处理方案,如图4所示。
SR(x,j)(想,())
f
范围本指数
(1-N)
max #1
斜坡指数(1-L)
斜坡#1
max #2
N点FFT
模拟数字转换器
RR(n,j)
max #3
.....
...
距离处理部分
斜坡#2
斜坡#3
X(a)
距离ROI检测部分
比较器
X(a)
开关# 1
多普勒ROI检测
(寻找最大值)
M点FFT
|
..... ... |
多普勒处理部分
斜坡指数(1-M)
max #5
.....
...
max #4
多普勒指数
加法器
开关# 2
/Q
ɑ
比较器
是否是目标
图4.利用ROI预处理方案设计目标检测处理结构。
相比于一般的检测方法2D-FFT,增加了两个ROI预处理块:多普勒处理部分之前添加了距离ROI检测部分和CA-CFAR处理之前多了多普勒ROI检测(寻找最大值)部分。所设计的目标检测过程的步骤如下:
- 距离处理部分
像传统的方法、N点FFT处理器将接收到的信号Sr(S,L)为频谱RR(n,l)。在这里,二维地
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136969],资料为PDF文档或Word文档,PDF文档可免费转换为Word

