英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
自动引导车在仓库环境中的可靠定位的标志放置
摘要:可靠,有效的定位系统是自动导引车(AGV)在仓库环境中自动完成给定任务的基础。然而,没有明显的特征可用于在仓库环境中提取的AGV的定位,并且其剂量使得难以实现AGV的定位。因此,在本文中,我们集中在仓库中优化地标布置的问题,以提高本地化的可靠性。首先,我们考虑实际的仓库环境,将地标布置的问题转化为优化问题,目的是最大化每个基本单位的本地化之间的差异程度。然后使用遗传算法(GA)来解决优化问题。然后,我们将观察到的地标与存储在地图中的已知地标匹配,并且在匹配完成之后使用三角测量方法来估计AGV的位置。最后,在真实仓库环境中的实验验证了我们的方法的有效性和可靠性。
一.介绍
高可靠性和高精度定位系统对于AGV在智能仓库中是至关重要的,因为它强烈地决定其效率和安全性。现在,在工业环境中有很多定位方法用于AGV。基于地标的定位系统,可以实现更高的可靠性和更高的精度,广泛应用于工厂环境。
到目前为止,已经提出了很多基于地标的定位方法。 一些方法取决于自然地标[1] [2]在环境中本地化。 基于自然地标的方法是有希望的,因为它们不需要修改环境,然而,必须有明显的特征,并且我们必须提前知道环境模型。不幸的是,没有足够的明显特征被提取,并且环境的许多部分在仓库环境中非常相似。基于自然地标的方法容易失败,因为自然地标难以被检测到的稳定性和环境的固有模糊性。
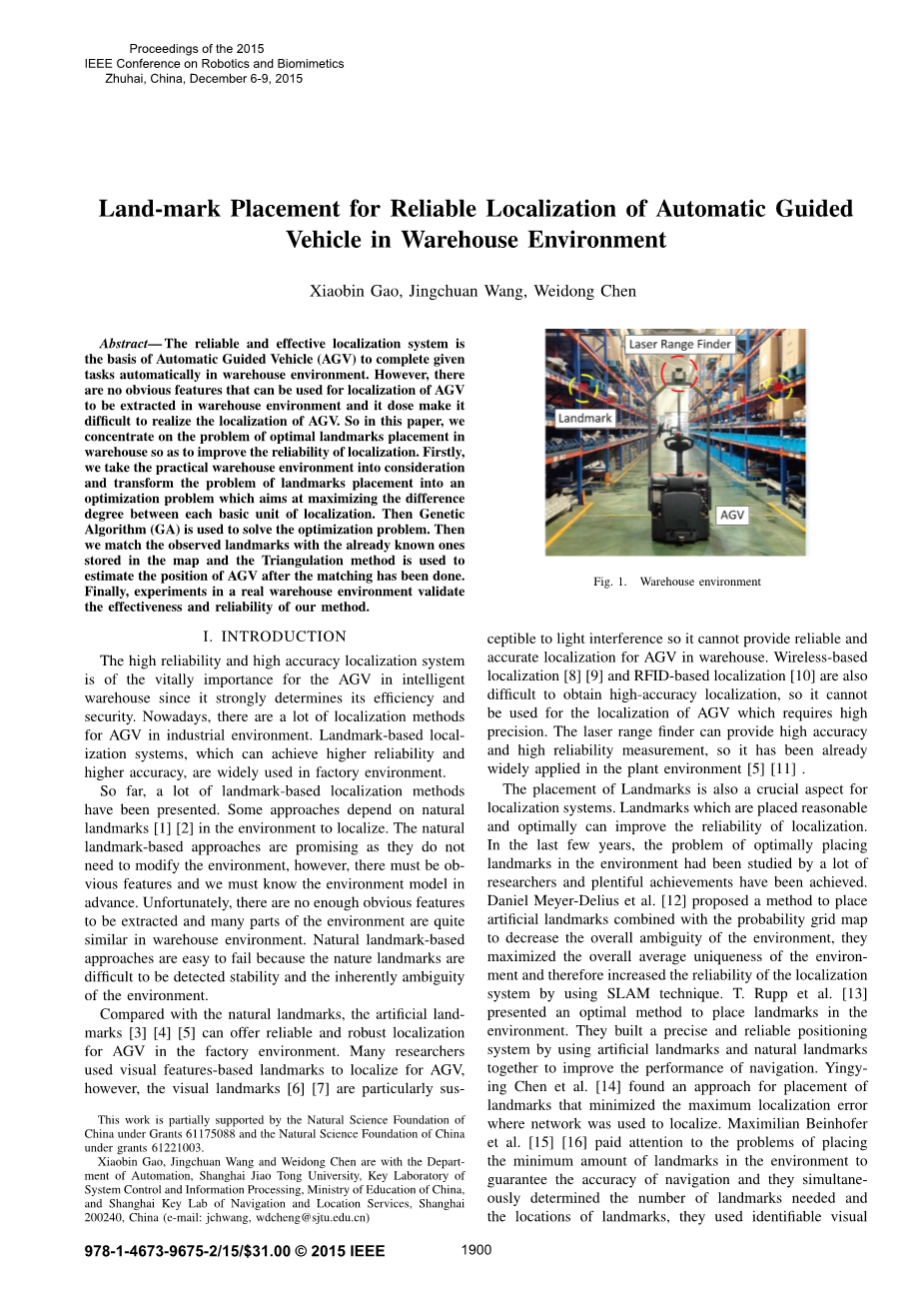
与自然地标相比,人工地标[3] [4] [5]可以为工厂环境中的AGV提供可靠和鲁棒的定位。 许多研究人员使用基于视觉特征的地标来定位AGV,然而,视觉地标[6] [7]特别容易受到光干扰,因此它不能为仓库中的AGV提供可靠和准确的定位。 基于无线的定位[8] [9]和基于RFID的定位[10]也难以获得高精度定位,因此它不能用于需要高精度的AGV的定位。 激光测距仪可以提供高精度和高可靠性测量,因此已经在工厂环境中广泛应用[5][11]。
图一 温室环境
地标的布置也是定位系统的一个关键方面。布置合理和最佳的地标可以提高本地化的可靠性。在过去几年中,许多研究人员已经研究了将地标最佳地放置在环境中的问题,并且已经取得了丰富的成果。Daniel Meyer-Delius等人[12]提出了一种将人工地标与概率网格地图结合以减少环境的总体模糊性的方法,它们使环境的总体平均唯一性最大化,因此通过使用SLAM技术提高了定位系统的可靠性。T. Rupp 等人[13]提出了一个最佳的方法,放置地标在环境中。他们建立了一个精确和可靠的定位系统,通过使用人工地标和自然地标,以提高导航的性能。Yingying Chen等人 [14]发现了一种用于放置地标的方法,其最小化了被用于网络定位的最大定位误差。Maximilian Beinhofer 等人 [15] [16]注意到在环境中放置最少量的地标以保证导航的准确性的问题,并且他们同时确定了所需地标的数量和地标的位置,他们使用可识别的视觉标记。唐恒波等[17]提出了一种用于放置地标引脚以通过增加差异度来增加定位鲁棒性的方法,然而,在处理优化问题时,优化问题被简化,他们发现了在预定离散序列中的最优解,只考虑了地标的一维放置。
与上述方法不同,我们将不可区分的人工地标放置在货架梁上,可以通过激光测距仪最佳地观察到,从而在仓库环境中实现AGV的高精度和高可靠性定位。这是地标的二维布局。为了解决优化问题,采用遗传算法,获得满意的结果。提出了一种匹配方法来解决数据关联问题。实验结果表明,该方法是有效的,可以获得可靠和高精度定位的AGV在仓库环境。
二.环境模型
A.环境描述
图2 环境描述
如图2所示,在整个仓库中有三条道路,每条道路的环境是相同的。 射频识别(RFID)标签放置在每条道路入口的中间。 地标被放置在架子梁上。
表示全局坐标系,表示以RFID标签为原点的道路坐标系。 RFID标签的坐标值在坐标系中是已知的。 当AGV被分配以自动完成仓库中的任务时,有三个用于AGV的本地化的过程。 首先,使用RFID标签来确定AGV所在的道路。其次,我们使用基于地标的定位方法来实现AGV在某些道路中的高精度位置和定向。 最后,我们可以得到AGV在整个仓库中的全球位置和方向。 然后AGV可以自主地完成给定的任务。
B.坐标系定义
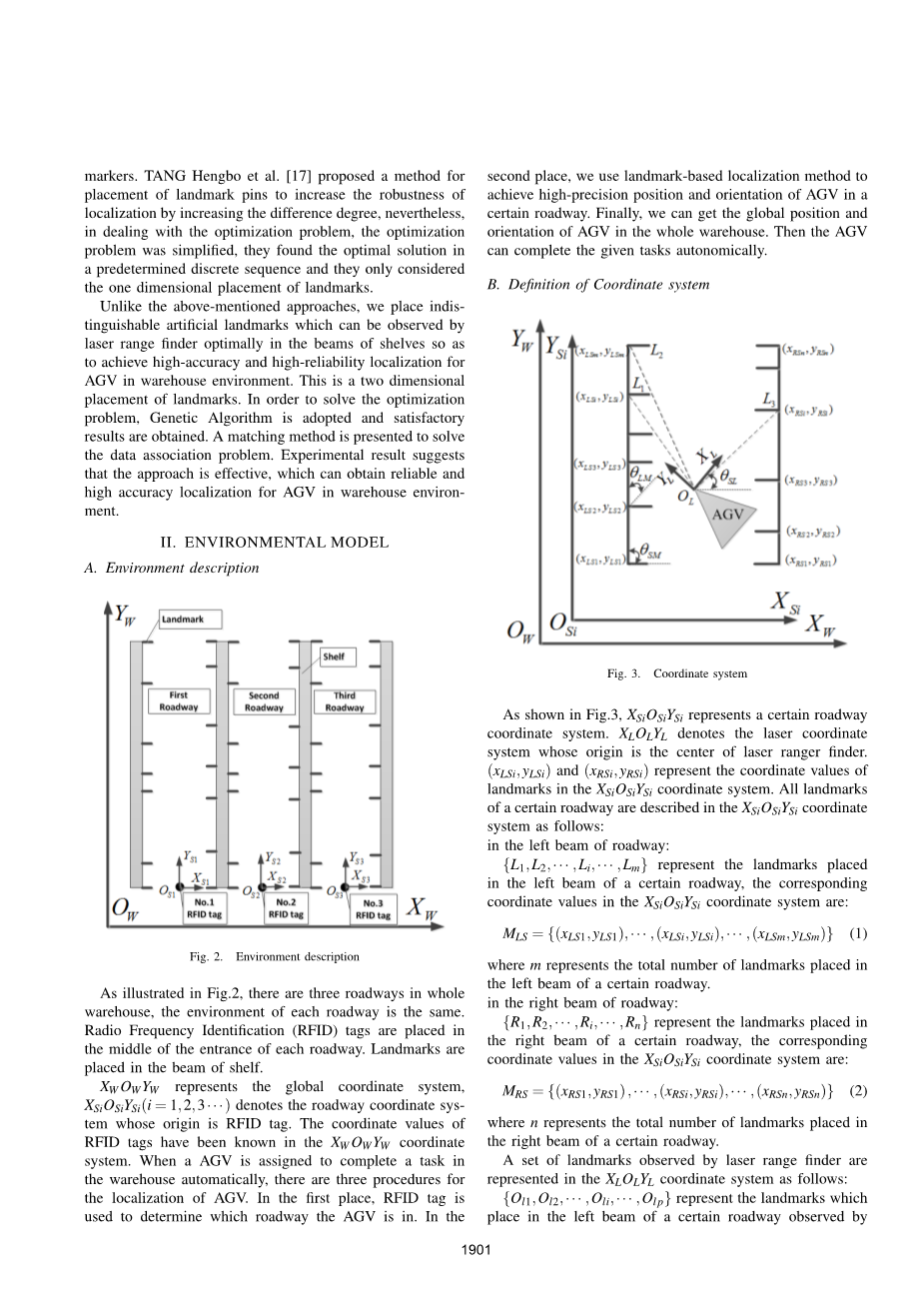
图三 坐标系
如图3所示,表示某一道路坐标系。表示其原点是激光测距仪中心的激光坐标系。和表示坐标系中的界标的坐标值。 某个道路的所有地标在坐标系统中描述如下:在左梁道:
表示放置在某一道路的左横梁中的地标,坐标系中的对应坐标值为:
(1)
其中m表示放置在某一道路的左横梁中的地标的总数。
在右梁的道路:
表示放置在某一道路右梁中的地标,坐标系中的对应坐标值为:
(2)
其中n表示放置在某一道路的右梁中的地标的总数。
由激光测距仪观察到的一组界标在坐标系中表示如下:
表示放置在左光束中的界标通过激光观察到的某一道路,坐标系中的对应坐标值为:
(3)
表示位于由激光器观察的特定道路的右光束中的界标,坐标系中的对应坐标值是:
(4)
其中和,这意味着可以形成三角形的至少三个界标被观察到,我们可以计算AGV的位置和方向。
坐标系中激光测距仪的位置和方向由,描述,其中是位置,是取向。激光测距仪在 中的位置和方向坐标系由描述,其中是位置,并且是方向。,和是观察到的并且成功匹配的三个界标,它们是定位的基本单位。我们假设和都在左波束中,在右波束中。 表示在坐标系中的,和的坐标值。
表示在坐标系中的,和的坐标值。
是坐标系中端点为和的线段的方向。用于表示坐标系中上述段的方向。
三.地标的安置
合理部署地标可以提高AGV的本地化性能。本节将介绍如何在仓库环境中优化地标。
A.差异程度的定义
首先,我们定义本地化的基本单位。可以通过激光同时观察并且可以形成三角形的三个界标是定位的基本单位。 基本定位单元的特征是三角形的三边。考虑到测量的不确定性,为了减少不匹配率并增加地图匹配的鲁棒性,我们应该最大化三角形的差异度,即当AGV在某个道路中导航时,由激光器观察到的三角形是唯一的。
和表示可以通过激光在两个不同位置观察到的两个基本定位单位,其中,,和表示放置在左光束中的界标,和表示放置在右光束中的界标。 即。设表示和之间的距离。
的特征定义为:
(5)
的特征定义为:
(6)
形式(5)和(6),我们定义:
(7)
和表示定位的两个基本单位,其可以通过激光在两个不同位置观察到,其中,,和表示放置在右光束中的界标,和表示放置在左波束中的界标。 即。 表示和之间的距离。
的特征定义为:
(8)
的特征定义为:
(9)
形式(8)和(9),我们定义:
(10)
那么我们可以定义差异度为:
(11)
B.优化问题的目标
这个优化问题的目的是最大化由(11)定义的差异度。 目标函数定义如下:
(12)
在下面条件
其中(12)意味着最大化由(11)定义的差异度。(13)和(14)意味着同一光束中两个相邻标记之间的距离大于且小于,是最短段的长度,是可由激光器观察并识别到的最长段的长度。(15)和(16)意味着两个相邻段的和小于,以便确保AGV在AGV在道路中航行时可以连续观察至少三个地标。(17)意味着的和应该非常接近表示道路的长度的,并且(18)意味着的和也应该非常接近。,和是预定义的阈值。
C.优化方法
由于上述优化问题是高维和非线性的,没有解析解,传统方法难以解决这个问题。 启发式算法有效解决这些高维或非线性的优化问题。遗传算法[18]具有良好的全局搜索能力,不容易陷入局部最小值,可以从解空间中快速搜索出解。 GA用于优化传感器节点的分布,以提高无线传感器网络的性能[19]。因此,我们将使用GA来优化地标的分布。我们将描述人口的初始化和我们设计的适应度的函数。交叉,突变和选择使用通常的方法参考[18]。
(1)初始化
初始群体是随机生成的,初始群体描述为(19)。
其中是群体中每个个体的基因,其表示在坐标系中放置在左光束中的界标的坐标值 。 是群体中每个个体的基因,其表示在坐标系中放置在右光束中的界标的坐标值。基因满足以下条件:
(20)
其中,是两个相邻基因的距离。
(21)
其中,是两个相邻基因的距离。
(2)合适的交汇点
根据式(13)—(18),我们设计的惩罚函数如下:
(22)
其中是个体的惩罚函数。,,和定义如下:
这里,并且。
其中,,,是惩罚因子。那么个体的适应度定义如下:
(35)
其中是个体的适应度,从(35)可以得到,较大的意味着个体的更好的适应度。
四.定位方法
A.地图匹配
当由激光测距仪观察到界标时,它们必须与存储在地图中的已知的相关联。 具体方法如下:
(36)
其中
从(36)和(37)我们可以得到:
(37)
如果,则映射成功匹配,其中是预定阈值。
B.位置估计
如图3所示,和可以很容易计算,从和,可以计算:。然后使用三角测量法[20]进行计算:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141995],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

