英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于LVQ和HOG的速度限制交通标志检测和分类
鲁贝尔比斯瓦斯 计算机科学与技术系工程
BRAC大学,达卡,孟加拉国
摘要:正确识别交通标志可以确保驾驶安全并在减少道路交通事故的数量上发挥非常重要的作用。本文代表了一种检测速度的统一方法限制交通标志所在区域并通过识别标志来确认速度数。在这个系统中,首先是红色物体使用LVQ从图像分割。其次,从颜色中提取检测到的圆形部分使用边界框,然后直方图分割图像Oriented Gradient(HOG)用于收集特征循环对象的提取部分,最后是SVM分类器用于训练每个速度的HOG特征没有。进入相应的分类。一般来说,系统首先检测禁止的交通标志,指定检测到的标志是否是限速标志,然后在检测到标志的情况下确定允许的速度是一个限速标志。 SVM分类器经过训练在不同光线下收集的200张图像条件。为了检查这个系统的稳健性,它确实如此测试了381张包含361限速的图像交通标志和30个非限速标志。交通标志被可靠找到的准确率为92.75%,显然表明,该系统的高稳健性。
关键词:交通标志; 圆形霍夫变换;HOG;LVQ;SVM
1.引言
道路交通事故增加的警报率是一个现在全世界关注的主要因素。在这背后一个主要原因
是司机未能识别交通,特别是在恶劣天气条件下的迹象,虽然研究人员专注于寻找障碍的解决方案检测或行人识别,较少强调对交通标志进行适当的识别。因此,一个自动识别系统通过提前警告司机,可以大大减少这种事故的发生。
交通标志在对道路使用者的指示方面起着非常重要的作用。早期识别速度限制标志可以帮助司机及时的调整速度,这样不仅可以减少污染,而且可以减少事故的数量,拯救生命[1]。
驾驶员支持系统(DSS)可以实时的检测和识别交通标志。这有助于改善流量交通系统的流量效率和安全性[2-3]。
禁止交通标志是一组标志受雇禁止道路使用者从事某些活动道路的未来部分,如禁止停车,禁止掉头,并且规定了交通的速度。因为人类的视觉感知能力取决于这些人的身心状况能力会受到许多因素的影响,如疲倦,和紧张驾驶。因此,拥有一个非常自主的自动系统,可以识别这些类型的流量迹象。及时将这些信提供给司机可以预防事故,挽救生命,增加驾驶表现[4-5]。
本文提出了一种检测速度的新方法限制交通标息志具有更强的稳健性。这篇论文是基于LVQ的颜色分割,圆形霍夫转换为圆检测,特征提取使用HOG和最后的SVM分类器对不同的分类限速交通标志和非限速标志。
论文的结构如下:
第2节提出相关工作作为拟议的方法和缺点;
第3节简要介绍了限速交通标志的结构;
第4节中,详细提到了如何应用算法的过程;
第6节中,给出了结果和分析;
2.相关工作
最近,研究对象检测和流量标志识别因其广泛而迅速增长一系列潜在的应用。但主要的挑战区分每项研究的表现都是成功率,各种天气条件,响应时间,成本和效率。
Hsiu,Chao,Kun和Shang [6]提出了一种使用离散余弦变换(DCT)和奇异值分解(SVD)来提取特征的系统。对于数据的预处理,他们使用ROI检测,RGB颜色分割和LoG边缘检测器。训练数据集包含10000个图像,而测试数据集包含210个新图像。但是与精确度超过90%的拟议系统相比,整体精度为78%,对于恶劣天气条件下的失真图像,该过程非常复杂且不太可靠。
另一个系统由Auranuch和Jackrit提出[7]使用神经网络技术识别交通标志模式。使用阈值技术,高斯滤波器,Canny边缘检测和Contour and Fit Ellipse预处理图像。用52个测试图像测试该方法的计算成本,平均处理时间为37毫秒每帧。该系统的一个缺点是处理时间随着具有更复杂背景的图像而增加。
Aoyagi和Askura [8]也提出了一种遗传算法来识别灰度图像中的道路标志。由于交叉,变异算子和最优解的限制,不能保证获得结果。
HOG最重要的应用是第一个Dalal和Triggs [9]介绍了这种方法识别行人。主要有两种类型数据库:MIT行人数据库包含509个训练和200个测试图像,INRIA行人数据库包含1805个图像。HOG用于提取不同位置和运动的行人特征,然后使用SVM分类器对样本进行训练和测试输入图像 虽然最初的焦点只是静态图像,但后来他们扩展了对电影和视频中人体和其他物体检测的测试。
张先生等人 [10]提出了一种使用HOG描述符进行对象检测的多分辨率框架。最初使用较低分辨率的功能,拒绝大多数负面窗口,留下较少数量的窗口以获得更高的分辨率。分辨率最低的分类器几乎拒绝了80%的窗口,检测率为98.6%。最终,前三个低分辨率被拒绝超过99.9%,检测率为94%。这种高成功率反映了HOG在交通标志识别中用作特征描述符的潜力。
3.禁止交通标志
交通标志一般采用特殊形状和颜色设计,与自然环境截然不同,这使得驾驶员可以轻易识别[11]。它们的设计,制造和安装符合严格的规定[12]。与自然和/或人造背景[13]无法区分,它们采用固定的二维形状设计,如三角形,圆形,八边形或矩形[14]。颜色被调整为符号类别(红色=停止,黄色=危险)[15]。标志可以有三种颜色:边缘,内部和象形颜色。
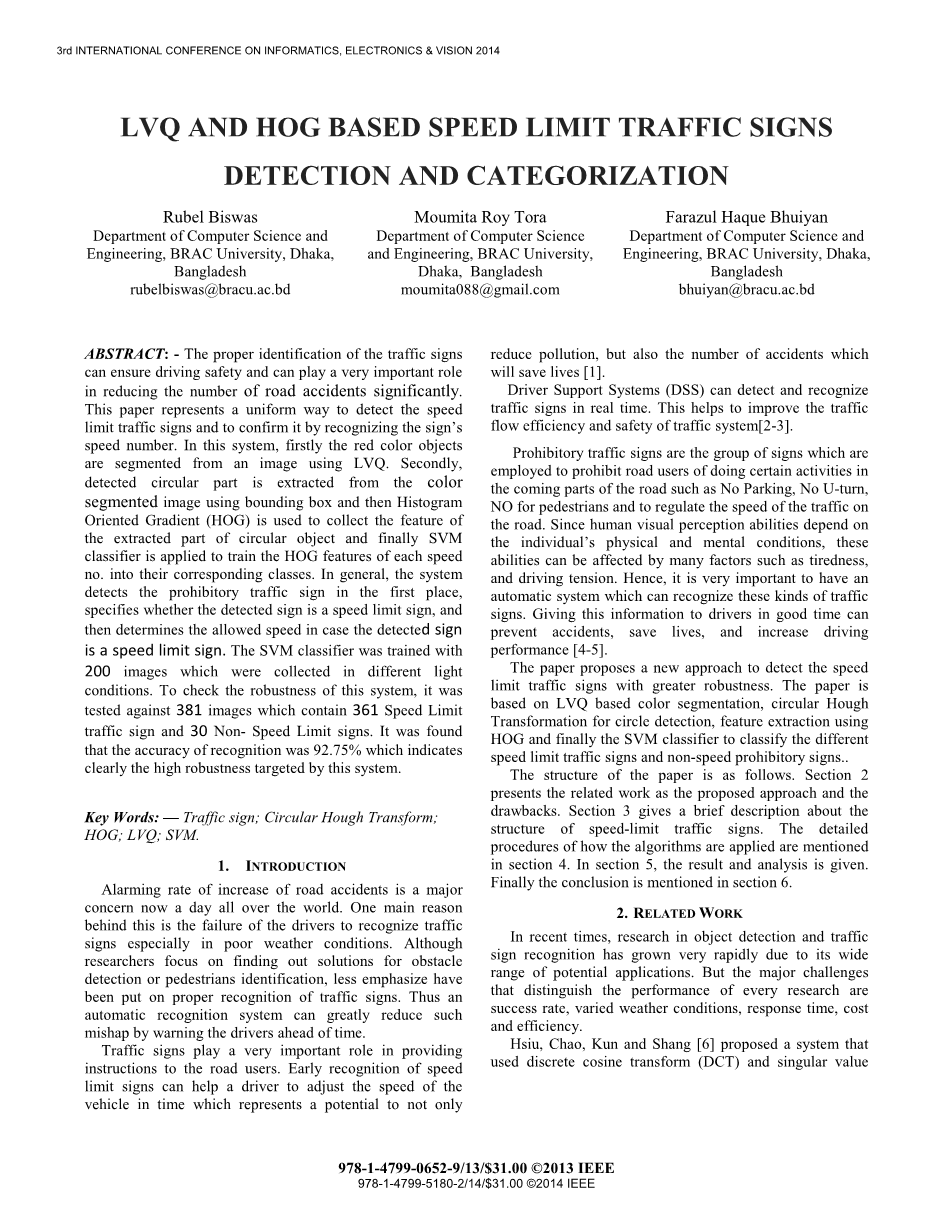
限速交通标志表示驾驶员在特定道路上预计达到的最大限制。速度是根据道路类型,面积,安全条件等关键因素设定的。形状,颜色和数字反映了图1所示的重要特征,并且这些标志具有非常多的类间相似性,这使得它成为区分他们彼此特征。
图1:限速交通标志[16]
4.系统概述
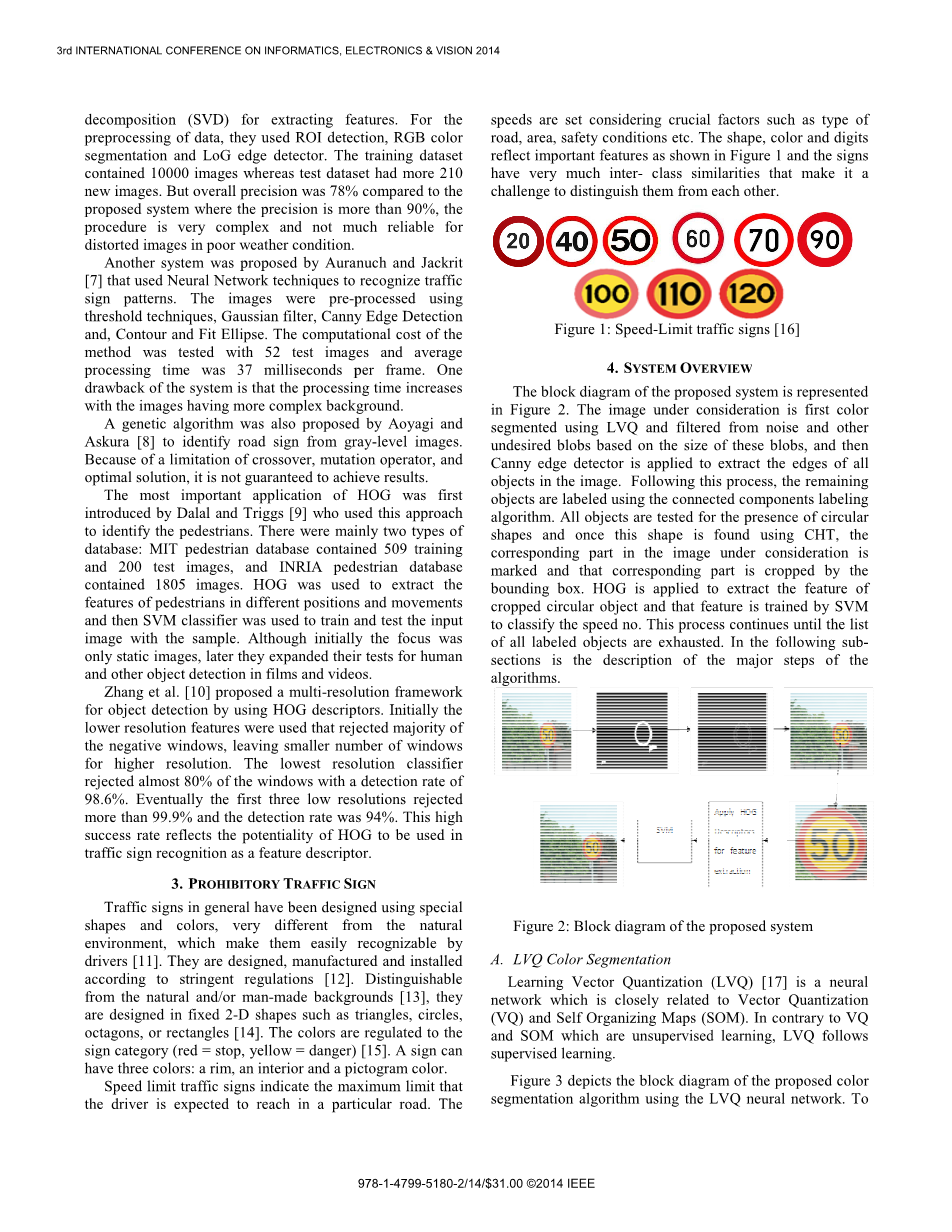
所提出的系统的框图如图2所示。所考虑的图像首先使用LVQ进行颜色分割,并根据这些斑点的大小从噪声和其他不需要的斑点中滤除,然后使用Canny边缘检测器提取边缘 图像中的所有对象。在此过程之后,使用连接组件标记算法标记剩余对象。测试所有对象是否存在圆形形状,并且一旦使用CHT找到该形状,则标记所考虑的图像中的相应部分并且通过边界框裁剪相应的部分。HOG用于提取裁剪圆形物体的特征,并通过SVM训练该特征对速度值进行分类。此过程将继续,直到所有标记对象的列表都用完为止。在以下小节中是对算法主要步骤的描述。
图2:拟议系统的框图
A:LVQ颜色分割
学习矢量量化(LVQ)[17]是一种与矢量量化(VQ)和自组织映射(SOM)密切相关的神经网络。与无监督学习的VQ和SOM相反,LVQ遵循监督学习。
图3描绘了使用LVQ神经网络的所提出的颜色分割算法的框图。为了实现颜色分割,首先通过训练图像中的像素的Hue(H)和饱和度(S)来训练LVQ神经网络。一旦完成训练,LVQ就能够根据训练阶段中使用的颜色对要分割的图像进行颜色分割。对于交通标志识别的应用,有三种特别感兴趣的颜色。它们是红色,黄色和蓝色。这意味着LVQ在竞争层(H和S)中有两个神经元,在线性层(红色,黄色和蓝色)中有三个神经元。
图3:基于LVQ的颜色分割系统
从存在交通标志的交通场景收集训练图像.包含交通标志的图像部分与图像手动分离,并被用作训练的阳性样本。图像的其他部分用作阴性样本。图4描绘了用作正样本和负样本的一组图像。
图4:LVQ采用正负色训练
来自所有训练图像的像素从RGB转换为HSV颜色空间。然后将它们与相应的目标颜色合并在一起,形成一个矩阵,其中每一行由像素的色调,饱和度和相应的颜色代码组成。
该矩阵如下所示。
H1 S1 C1
[ : : : ]
Hn Sn Cn
图5显示了使用该算法的分割结果 图5:颜色分割的结果
B:圆形物体检测
由于噪声和形状缺陷,应用圆形霍夫变换而不是常规形式来检测复杂对象,例如三角形,圆形和矩形。它可以描述为x-y平面中圆的中心点(a,b)到参数空间(r,8)的变换。笛卡尔和参数格式的圆方程如下:
(x — a)2 (y — b)2 = r2 (1)
x = a r cos(8) (2)
为了确定给定输入中是否存在圆,需要在三维参数空间(a, b, r)中累积投票。目标是找到中心的(a, b)坐标。参数空间中的(a, b)点的轨迹落在以(x, y)为中心的半径r的圆上。真正的中心点对于所有参数圆都是通用的,并且可以使用霍夫累加器阵列找到它。 这种方法如图6所示
图6:用于检测圆圈的投票机制 图7:圆圈的投票机制
投票机制指定给予图像中任何对象的投票数,对象的位置以及对象的半径(如果它是圆形)。圆形物体由投票机制产生的峰值识别,而其他物体按平滑曲线分类,并且投票曲线中没有峰值。图7显示了圆形对象的投票机制。在许多情况下,由于不完美,噪声和具有相同颜色的其他物体的存在,由canny边缘检测器检测到的两个禁止交通标志中的一个可能是不健康的。要解决此问题,应用以下一组或多个规则来检测禁止的交通标志:
1.如果两个圆形边缘是健康的并且被检测到,则该位置由边界框界定。
2.如果在内边缘健康的情况下破坏外圆边缘,则绘制基于检测到内边缘的边界框。
3.如果在外边缘健康的同时破坏圆的内圆边缘,则绘制基于标志外边缘检测的边界框。
C:HOG速度特征号
它是用于对象检测的特征描述符。 它在图像的局部部分使用梯度方向。
为了提取特征,需要使用边界框从输入图像裁剪检测到的圆形区域,并应用以下步骤来提取该裁剪圆形区域的HOG特征:
1.计算水平和垂直渐变;
2.计算梯度方向和大小。对于彩色图像,为每个像素选择最高梯度幅度颜色通道;
3.图像大小调整为48 * 48;
4.划分为6 * 6块,50%重叠,因此总共5 * 5 = 25块;
5.每个块包含2 * 2个单元,大小为8 * 8;
6.将梯度方向量化为9个区:
1).投票是梯度幅度;
2).插入相邻bin中心之间的双线投票。例如,如果Oslash;= 850且箱子为70和90,则到箱子中心的距离分别为15和5。因此比率为5/20和15/20;
3).投票也可以用高斯加权,以减少块边缘附近的像素;
在长度为14400(4 * 9 * 5 * 5 * 16)的1D矩阵中连接直方图,即特征尺寸。
D:Support矢量机(SVM)
在机器学习中,支持向量机是具有相关学习算法的监督学习模型,其分析数据并识别模式,用于分类和回归分析。给定一组训练示例,每个示例标记为属于两个类别之一,SVM训练算法构建将新示例分配到一个类别或另一个类别的模型,使其成为非概率二元线性分类器。除了执行线性分类之外,SVM还可以使用所谓的内核技巧有效地执行非线性分类,将其输入隐式映射到高维特征空间[18]。
所提出的系统使用一对一SVM来训练和匹配测试图像的描述符与训练的图像。这种多类SVM的工作原理是将M类问题视为一系列两类问题。拟议的解决方案中有11个类别(20,30,50,60,70,80,90,100,110,120和未知); 每个速度限制属于特定类,而类11是未知类。
5.结果与分析
为了分析所提出的方法的性能,进行了以下实验。在所有测试中调用了交通标志图像的标准数据库。该数据库可从[19]获得。
A:LVQ颜色分割
使用在大范围的环境条件下收集的大量交通标志图像来测试该颜色分割。该方法在不同光照条件(晴天,阴天,雾天和雪况)和不同背景下的200多幅图像上进行了测试,如表1所示。它们建立了非常好的稳健性。超过90%的调查案例成功实现了细分。
表1:LVQ颜色分割的结果
|
Condition |
No. of images |
Success % |
|
Bad Lighting |
35 |
90 |
|
Faded signs |
33 |
80 |
|
Blurred |
27 |
92 |
|
Fog |
22 |
78 |
|
Highlight |
22 |
95 |
|
Rain fall |
30 |
95 |
|
Snow Fall |
32 |
95 |
对于32个随机选择的图像,测量所提出的方法所需的分割时间。使用Matlab和HP 1000计算机,颜色分
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[19665],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

