英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
外文文献翻译
英文题目: Generation of Panoramic View from 360 ° Fisheye Images Based on Angular Fisheye Projection
题 目 :基于角度鱼眼投影的360°鱼眼图全景生成
基于角度鱼眼投影的360°鱼眼图全景生成
Xiao Shouzhang1, and Wang Fengwen2
1东北大学信息科学与工程学院
2东北大学,电子邮件:
axiaoshou-zhang@163.com, wfw0335@126.com
摘要:本文提出了一种基于角鱼眼投影模型的360 °鱼眼镜头图像全景生成算法。鱼眼镜头可以用来捕捉大视场的场景。当鱼眼镜头的方向朝向前方时,视角可以达到约180°。就像半球形鱼眼镜头一样,当视角向下或向上时,地平线可以达到360度。首先将图像平面映射到视平面 - 球面上,得到球面点坐标,然后利用角度鱼眼投影模型得到鱼眼图像的半径。其次,利用鱼眼图像的半径和球面点坐标计算鱼眼图像点的坐标。最后,通过反向映射将鱼眼图像的点映射到目标平面。实验表明,该算法简单快速,并且可以获得理想的图像。
关键字:角度鱼眼投影,鱼眼图像,全景展开,向后绘图
1介绍
鱼眼镜头可以用来捕捉大视场的场景。当鱼眼镜头的方向朝向前方时,视角可以达到约180°。就像半球形鱼眼镜头一样,当视角向下或向上时,从地平线来看,视角可以达到360度。因此,因为鱼眼镜头超视图的特点,它被广泛应用于计算机视觉领域,如虚拟现实技术,机器人导航,几何图像渲染,视频监控,射击场地等。特别是在虚拟现实领域,为了获得非常生动的视觉世界,全景图像至关重要。过去的全景图像是直接使用一般相机或视频拍摄得到真实图像序列,然后使用图像拼接的方式获得的。这种方法对原始图像的要求越来越高,因为每幅图像都有更复杂的信息,全景图像不仅生成速度不能满足要求,而且效果也不理想。由于鱼眼镜头所拍摄的图像的大鱼眼视角,一般使用两个或几个鱼眼镜头所拍摄的图像,甚至一个图像可以就满足全景图像的要求。但是,由于鱼眼图像存在的严重失真的问题,它会产生全景图像不便等相关的问题。由于存在这种失真,拼接多幅鱼眼图像是非常繁琐的任务,涉及到进行大量的计算和图像处理。一般而言,很难解决这个问题。因此,需要做一些近似和简化假设才具有可行性。实际应用假设,景象中被拼接的目标距离镜头足够远,可以忽略立体差异。
鱼眼镜头是一种焦距极短并且视角接近或等于180°的镜头。16mm或焦距更短的镜头。 它是一种极端的广角镜头,“鱼眼镜头”是它的俗称。为使镜头达到最大的摄影视角,这种摄影镜头的前镜片直径且呈抛物状向镜头前部凸出,与鱼的眼睛颇为相似,“鱼眼镜头”因此而得名。鱼眼镜头属于超广角镜头中的一种特殊镜头,它的视角力求达到或超出人眼所能看到的范围。因此,鱼眼镜头与人们眼中的真实世界的景象存在很大的差别,因为我们在实际生活中看见的景物是有规则的固定形态,而通过鱼眼镜头产生的画面效果则超出了这一范畴。
该研究是通过扩展一个360°鱼眼图像来获得全景图像的算法。传统上,鱼眼图像生成全景图像的主要方法是基于圆柱体模型和基于半立方体的纹理映射扩展和全景展开。这两种方法均基于半球鱼眼投影模型。基于半立方体纹理映射的结果扩展不仅与实际密度不匹配,而且在五个平面上的分布不利于观察。 基于气缸模型的全景展开太慢,结果不令人满意。 两种算法都有自己的盲点,不能成为图像中心区域的扩展点。 针对这些不足,本文提出了一种基于角度鱼眼投影模型的算法,利用360°圆形鱼眼图像生成大面积图像,以此来解决算法的盲点问题。
2 角形鱼类投影模型
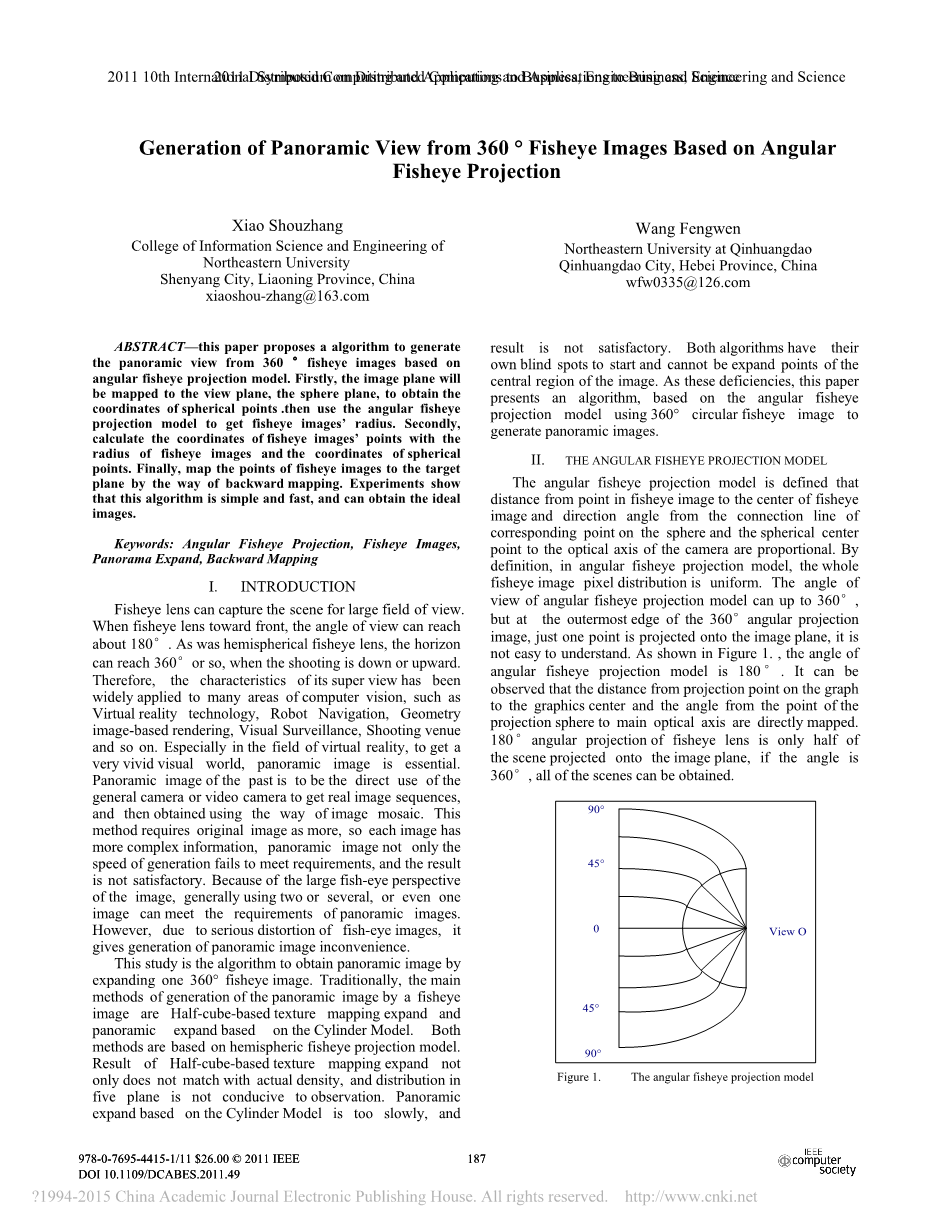
角形鱼眼投影模型主要的定义是从鱼眼图像中的点到鱼眼图像的中心的距离和从球体上的对应点的连接线与球形中心点到摄像机的光轴的方向角成比例。根据定义,在角鱼眼投影模型中,整个鱼眼图像的像素分布是均匀的。角度鱼眼投影模型的视角可以达到360°,但是在360°投影图像的最外边缘,只有一个点投影到像平面上,这是不容易理解的。如图1所示,角度鱼眼投影模型的角度为180°。可以看到,从投影点到图形中心的距离和从投影点到主光轴的角度直接映射。 180度投影鱼眼镜头只是投影到图像平面上的一半,如果角度为360°,则可以得到所有像素。总而言之,相较于普通的全景拍摄方式来说,鱼眼投影模型更加能够展现出好的效果。
图1.角度鱼眼投影模型
3算法理论
依次将360像素图像的每个半径上的像素依次与目标平面平行放置,然后可以展开理想的全景图。 这里,图2(a)显示了鱼眼图像模型,图2(b)显示了映射平面,也称为目标平面。 目标平面的水平轴是球面坐标的经度,垂直轴是纬度。 鱼眼图像的半径(OQ)对应于目标平面上的线(OQ)。 像素值也是一对一的。 得到鱼眼图像与目标平面之间坐标的映射公式,然后将图2(a)展开为所需的全景图。
图2.像素映射图
4算法步骤
最终目标是推导出鱼眼图像与目标平面之间坐标的映射公式。
推导映射公式的两种方法是正向映射方法和反向映射方法。 正向映射方法是通过一系列变换,用鱼眼图像上的点坐标计算目标平面上的点坐标,然后将该点的像素值赋值给目标点。 这是映射的最普遍的想法。 反向映射方法是从目标平面出发,读取目标贫民啊上的信息,得到鱼眼图像上对应点的坐标,在根据这些分配像素值。
前向映射法得到的目标图像的大小可能与鱼眼图像的大小不匹配,造成很多像素间隙。 因此,本文使用反向映射方法。
- 算法流程图
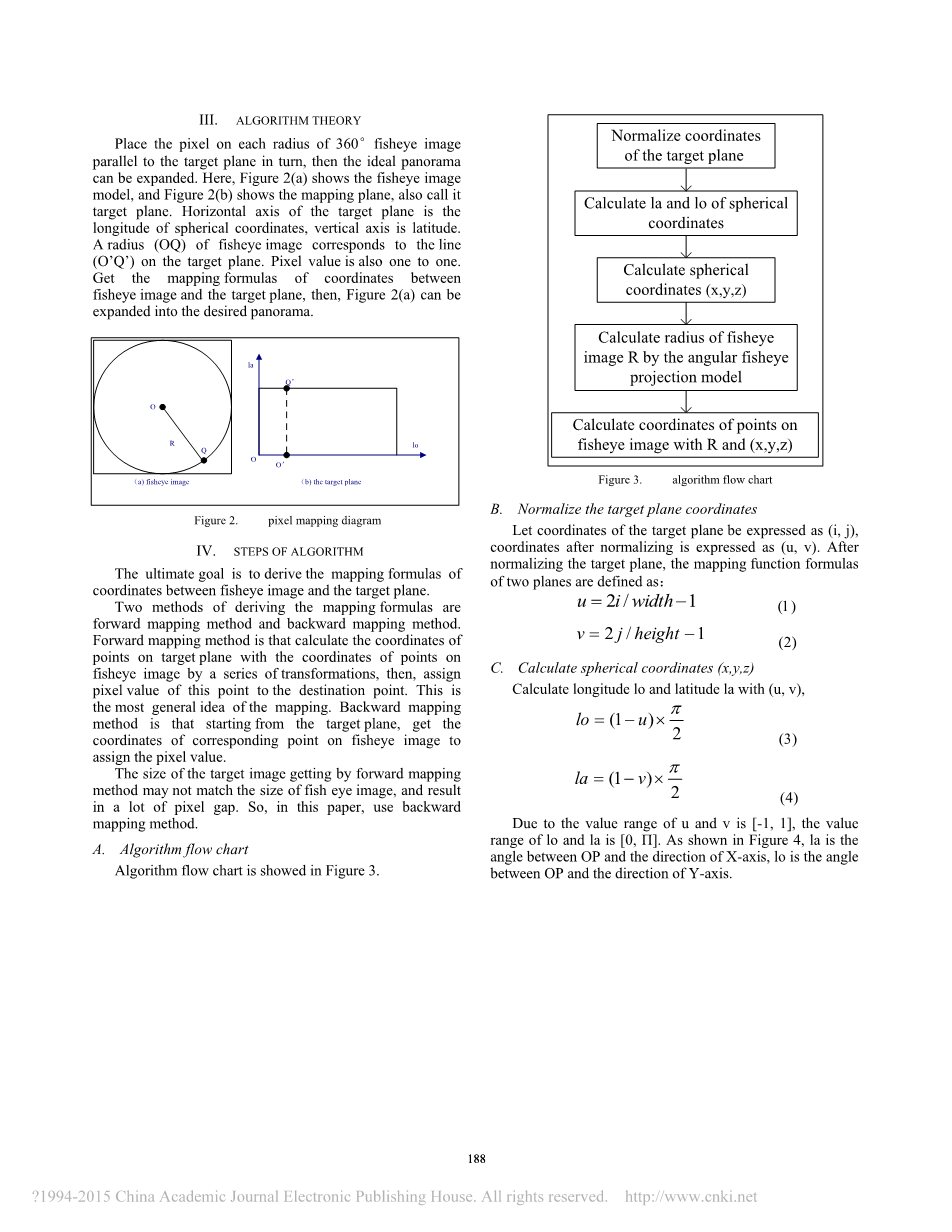
算法流程图如图3所示。
图3.算法流程图
- 标准化目标平面坐标
设目标面的坐标表示为(i,j),归一化后的坐标表示为(u,v)。 目标平面归一化后,两平面的映射函数公式的计算方法按照下面的公式进行计算˖
- 计算球面坐标(x,y,z)
用(u,v)计算经度lo和纬度la,计算的方法如下,
由于u和v的取值范围为[-1,1],lo和la的取值范围为[0,Pi;]。 如图4所示,la是OP与X轴方向之间的角度,lo是OP与Y轴方向之间的角度。
图4.纬度和经度图
假设球体的半径为1,用lo和la,可以将球形点P的坐标(x,y,z)的公式定义为˖
- 计算鱼眼图像R的半径和鱼眼图像上的点坐标
角鱼眼投影模型被定义为从鱼眼图像中的点到鱼眼图像的中心的距离和从球体上的对应点的连接线与球形中心点到摄像机的光轴的方向角成比例。 在该算法中,鱼眼镜头对应于半球形,所以鱼眼镜头的视角为180°,投影平面的长宽相应的视野尺寸为S。 可以得到与鱼眼图像对应的投影面上的直线距离。 设距离表示为Dist,鱼眼图像的宽度表示为Wid。 所以按照公式来计算出距离,公式如下,
对于球面坐标(x,y,z),对应于点(x,y)的斜边的长度定义为r,计算出r的大小。
如图5所示,球体上相应点(x,y,z)与球面中心点到摄像机主光轴的连线的方向角为phi;。
图5. r对应图的r和弧度
它可以从图5中得到,phi的计算方法如下˖
根据角鱼眼投影的定义,R的公式为
从以上可以计算鱼眼图像上点(x_src,y_src)的坐标
然后我们导出了从目标平面的点(i,j)到鱼眼图像上的点(x_src,y_src)的映射函数。 最后,只需要指定点(i,j)的像素值。
- 实验结果和分析
如图6所示,结果是理想的。 首先,它可以扩大鱼眼图像的整个场景,包括图像中心的场景,不存在盲区。 但是图7中的实验结果表明基于圆柱模型的算法不能做到这一点。 其次,它的计算速度更快。 以图6(a)为例,实验环境为实验软件为MATLAB 7.6.0(R2008),计算机为Intel(R)Pentium(R)4,CPU为3.00GHZ 2.99GHZ 1.00GB,大小为 图片是400u400(像素)。基于圆柱模型的全景展开时间为24.96秒,但角度鱼眼投影模型的成本仅为0.73秒。第三,程序结构简单,逻辑清晰简洁。最后,全景扩展的像素分布是均匀的,图像的定义符合实验的要求。
- 原始图片
- 实验结果1
- 实验结果2
图6.基于Angular Fisheye投影模型的实验结果
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[22536],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

