英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于VISSIM仿真的高速公路出口控制模式研究
摘要
为了研究高速公路出口匝道控制问题,我们应用了交通仿真软件VISSIM。根据高速公路出口匝道的交通特性,我们考虑运用交通模型参数。此外,此篇论文使用二分法和控制变量获得当车辆开始在出口匝道排队时的阈值,并且基于主干路次干路的交通流绘制综合分区图。通过选择主路和侧路的延误作为接入指标,我们在福州寿山入口和南二环高速公路出口研究了它们的交通控制模式。根据综合分区图的不同阶段,下面的模拟实验进行:①主路车辆拥有优先权,②出口匝道感应控制仿真研究,③模拟现状。根据仿真研究结果确定最优控制方法。
1、拥塞的分区理论
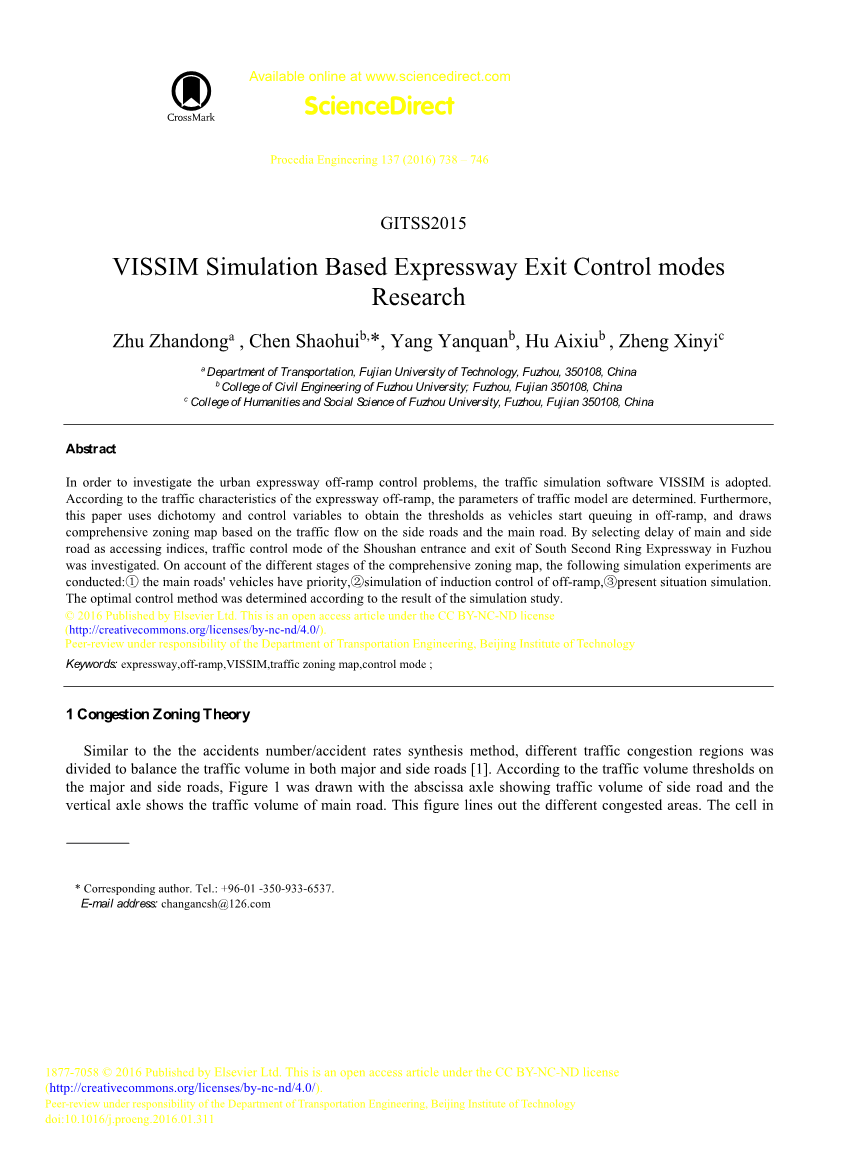
与事故数/事故率综合法相类似,将不同的交通拥堵区域划分为平衡主干道和侧道路的交通量。根据交通量阈值主要的辅路,图1绘制横坐标轴显示侧道路交通量和纵轴显示主干道的交通量。此表列出了不同的拥堵区域。右上方的表示的是最拥堵的区域和出口匝道与主干路受路边交通影响的最大干扰区。区域划分不反映平均比例,而是比例主要道路及道路的实际交通量。我们采用二分法和控制基于VISSIM仿真变量的方法得到了主干道和边道的交通阈值。这一理论的优点是,考虑到主要道路交通和侧道路交通,同时,它可以直观地确定 不同交通状况下的拥堵状况。根据不同的交通阶段,城市快速路出口采用不同的控制方法。
2、VISSIM仿真
2、1实验目的
1.为了获得关键车流量排队到出口匝道
2. 高速公路出口匝道延误与其他车道延误的比较,我们就可以得到“道路临界交通量”,“临界流量1”,当路边交通量达不到时,出口匝道交通不受或少受路边交通影响;“临界流量2”,当路边的交通量过大时,出现出口匝道排队现象;“临界流量3”,当侧道路交通量超过它时,副干道交通对主要道路交通的影响仅略有变化,或几乎恒定。
3. 研究主干道交通量变化对出口匝道和侧道交通运行的影响,得出“主干道临界交通量”。“临界流量1”,当主要道路交通量达不到,出口匝道和侧道路交通不受或少受路边交通影响;“临界流量2”,当主要路段的交通量过大时,出现出口匝道排队现象;“临界流量3”,当主要道路交通量超过它,主要道路交通的影响主要道路交通变化轻微,或几乎恒定。
4.根据主、侧道路的阈值,得到图10所示的出口匝道交通拥堵分区图
为了实现上述目的,以下模拟因素选择:交通主干道,侧路交通。评价指标包括匝道延迟、侧路延迟和系统总延迟。
2、2仿真模型标定
考虑到VISSIM软件是从国外进口,基于中国城市道路的特点和国外城市交通之间的差异,我们需要校准的仿真模型,选择以下参数,包括道路几何条件,车辆组成,所需的速度和出口环境。
根据高速公路的几何特征,我们建立了道路网络,并确定车道数、车道宽度、侧道路和主要道路的同时,我们建立了出口匝道交通量的比例和主要道路的交通到达。根据测量数据校准车辆的组成。
所要求的速度是指在自由流动条件下不受其它车辆约束或基本运行的速度。在VISSIM的软件来控制所需的速度在不同路段车辆速度。用自由车流状态对各类汽车的速度分布曲线进行累加,以百分之八十五车速作为预期车速。
在国内城市道路上,自行车对机动车辆的干扰与国外相比更大,特别是对于没有刚性隔离的高速公路和非机动车道。因此,出口环境以电动车为主要干扰因素。
2、3感应控制设置
基于感应控制理论,我们在出口匝道安装信号控制切断侧道路交通,以确保出口匝道车流畅通。随着信号控制,无论是侧道路车辆和非坡道车辆行驶在绿色阶段的下游,然而,侧道路车辆等待绿灯在停止标志,而偏离坡道车辆行驶在红色阶段。
这是VISSIM仿真的感应控制模型。我们选择半感应控制方法在主路与侧路设置探测器, 当我们在出口匝道设置探测器(视为D1),我们主要考虑出口匝道速度,侧车道速度和系统响应时间。因此D1的设置模式定义为公式1:
L1、探测器D1到出口匝道的距离(m);
L2、从停止线到出口匝道的距离(m);
t0、系统响应时间(s),这是接收到的感应信号和信号之间的滞后;
Delta;t、安全间隔时间(s);
V1、出口匝道速度(m/s);
V2、侧路速度(m/s);
队列探测器(视为D2)设置在路边,距离出口匝道30-50m。同时,路边探测器(命名为D3和D4)设置在距离路边停车线20-30米的地方。
路边的最短红灯时间设置为切断路边交通,以确保车辆检测主要道路上的探测器先移到路边,提高车辆行驶的效率。侧路的最短红灯时间的设置模式定义为公式2:
L1、出口匝道上的探测器D1到出口匝道间的距离(m);
V1、出口匝道速度(m/s);
3、案例分析
3、1寿山路口概况
它是在福州南二环高速公路寿山出口中间的主要道路,尽管它是对寿山的出口侧路。主路和侧路已由绿化带分隔。基于现场调查,得到南二环高速公路寿山出口的几何特征如图2和表1所示。
3、2寿山交叉口的交通现状
根据调查,我们确定寿山出入境高峰是17:00:00-18。寿山出口的交通状况,如图3所示。
我们利用电子狗雷达手段收集了速度,并得到了寿山出口速度如表2所示;人工计数法对高峰时段交叉口的交通量进行了调查,结果显示如表3。
3、3仿真过程与结果
根据寿山出入境的几何特征(表1),我们在VISSIM建立了道路网络。侧道路一般是双车道,在出口有一条附加车道。所以在出口的一侧有三条车道;车道宽度为3.5米;直行具有优先权;车辆组成按表3:重型车辆在侧道路为0.56%,摩托车的比例为侧道路为72.91%,重型车辆主线为4.78%。出口匝道交通量:主要道路的= 1 6.期望速度达到交通量是由表2校准。
3.3.1主要道路交通量对系统延误的影响
控制了道路交通量不变,通过改变主干道的交通量,我们分析了匝道、主路和侧路的延误。然后我们以线图的形式处理仿真数据,在实验中,我们建立了模拟时间长度为600秒,同时设置主路到达交通量2000,3000,4000,5000,6000veh/h,延迟分析图如图4所示。
根据上述模拟结果,主要道路交通的影响,出口匝道延误,主要和侧道路的变化只有轻微的变化当侧道路交通量是恒定的,以及主要道路交通量小于3000veh /小时。然而,当主路交通流超过3000veh /小时,出口匝道延迟,主、副路变化很大。从上面的图中可以看出,主要的道路交通流对出口匝道的延误影响最大,但对侧路延误影响不大。
3.3.2道路交通量对系统时延的影响
由于路边的摩托车和电动自行车的比例最高,占49.3%,因此在设置仿真参数时要对交通量进行标定。而且由于电动自行车和摩托车的速度相差不大,我们可以只设定摩托车所需的速度。控制主干道交通量不变的情况下,通过改变侧道路交通量分析出匝道、主路和侧路的延误。然后以线图的形式处理仿真数据。在实验中,我们设置了仿真时间为600秒的长度,同时设置了侧到路的交通量为1000,2000,3000,4000veh/h,延迟分析图显示在图5。
根据以上仿真结果,当主干道交通量恒定时,侧道路交通对匝道和主路延误的影响变化较小,而道路交通量小于3000veh /小时。然而,当它超过3000veh/h,出口匝道延误急剧上升。从上面的图中可以看出,侧道交通流对出口匝道延误的影响最大,但对主干道延误影响不大。而路边的延误也在增加。
3.3.3出口匝道队列引起的阈值
我们选择主车道和侧道路的不同交通量作为输入,并选择停机的平均停机时间作为输出。然后通过VISSIM用二分法得到临界交通量(如表4)。
由上表数据可以看出,它是重要的交通量的组合表,车辆启动停车在匝道时,主要道路的交通量为3000辆/h和侧道路交通量为2000辆/小时。根据图4 ~图6,主要道路的交通量是关键4000veh / h时,侧道路交通量是不变的。根据以上的临界值,得到了交通拥堵的区划图,如图6所示的出口匝道。
在交通拥堵分区图的基础上,针对不同的交通状况确定相应的控制方法。自由流动的阶段,我们使用非控制模式下匝道,而缓行和拥堵水平II级采用自适应控制。交通拥堵分区图划分了高速公路出口的交通状况,为高速公路控制模式的运用提供了控制范围。
4、三种控制方式的对比分析
4、1寿山路口的感应不控制方案
根据寿山路口交通调查数据的几何特征,使用公式1-2:从侧路下匝道是L2=5m停车线的距离;匝道速度V1 = 50.9km/h = 14.1m/s,副道路速度V2 = 45km/h = 12.5m/s;系统响应时间t0 = 2s;安全间隔时间T = 3S;距离探测器(D1)上下匝道匝道是L1 = 80m;赶走匝道速度V3 = 12.5m/s,最小的红(记Rmin)侧路7s。和单位的红色时间侧路延长(看作R0)可以比Rmin少。这里我们采取5S。
队列检测器(视为D2)设置在侧道,从出口匝道50米。同时,侧道路探测器(命名为D3和D4)设置在25米从路边停止线的地方。
4、2三种控制方案的仿真评估
平均延迟为不同控制方案对寿山路口的评价指标。并通过对比分析了不同的控制方案。基于仿真分析,在自由流动阶段没有控制,由于出口匝道交通不受侧道路交通影响或影响不大,由。因此,我们只是在出口匝道处模拟感应控制,现状主要道路车辆有优先通行匝道。延迟分析如下。
4.2.1拥堵程度1级仿真
拥堵程度I是在右上角的综合分区图的侧道路和主要道路交通流量。在仿真实验中,我们将主要道路的交通量6000veh / h和侧路4000veh /小时交通量,三种控制模式可以很容易地比较。模拟输出包括平均停机时间的出口匝道,主干道的延误,平均停机时间的路边和总延误。高拥塞阶段的延迟显示在表5。
4.2.2缓行阶段和拥堵程度2的仿真
正如你可以看到在综合区划图,左右侧的道路和主要道路的交通流量、交通量的主路和辅路落在之间的体积自由流动阶段和拥挤程度的缓行和拥堵水平II。在模拟过程中,我们的主要道路的交通量5000veh / h和侧路3000veh /小时交通量,三种控制模式可以很容易地比较。模拟输出包括平均停机时间的停机,主干道的延误,平均停机时间的道路,总延迟。延迟的缓行和拥挤程度的II期见表6。
通过对寿山出口交通仿真结果,我们可以得到以下结论:我们一直是自由流动阶段的非控制模式原有的控制方法。高拥堵阶段采用主干道优先通行方式。此外,侧道车辆优先的车辆在关闭匝道时,在匝道上的交通是小的。如果在这一时刻采取感应控制,主干道和匝道的延误将减少,但它导致排队在路边。因此,它使系统总的延迟增加,缓行和拥挤程度的II期研究的正确方式,可以增加主路的效率,但司机通常不承认别人的高峰时期。因此,我们建议使用感应控制标准化司机的驾驶行为。
5、结论
在本文中,我们用二分法和控制变量得到的阈值作为车辆开始排队使用VISSIM仿真驶出坡道。可以得到不同的控制模式下的临界交通量阈值。以福州南二环高速公路寿山路口交通控制方式为实验现场,我们得到的寿山路口采用上述方法综合区划图。对不同阶段的控制模式进行了仿真比较分析综合分区图。仿真结果表明,最优控制方法为:在自由流动阶段 使用非控制模式;对于缓行和拥挤程度的II期采用感应控制;水位高拥堵主要道路车辆优先或出口匝道。本研究为高速公路驶出匝道控制应用提供参考。
鸣谢
该项目是由评价和指导基于模拟多车道的高速公路交通安全设施优化研究的支持,这是从中国河北省公路局。作者宣称他们对这项工作没有利益冲突。
参考文献
[1]Wang, W.,Guo X.C., 2011.Traffic Engineering,Jiangsu:Southeast University Press..
[2]Zhao, L.H., 2009. Real-time traffic evaluation method using the Neuro-Fuzzy Consequence.Guangdong: Guangdong University of Technology.
[3]Huang, A.Q., 2011.Traffic Flow Analysis and Control Methods for Urban Freeway Main Lane amp; Auxiliary Lane.Beijing: Beijing Jiaotong University.
[4]Liu, L.,Sun, J.,Li, K.P., 2011.On-ramp Speed Control of Urban Expressway.Journal of Transport Information and Safety,29(3),15-18.
[5]Wang, X.Y., 2011.Control methods research of off-ramp on expressway. Beijing:North China University of Technology.
[6]Deng, Z.H.,Li, D.H.,Lin, K., 2014. Research on the Signal Progression on Zhuhai Meihuaxi Road.Road Traffic amp; Safety,1
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[139419],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

