英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
用笔形旋转波束散射计测量海流的可行性
摘要: 海流与海洋和大气相互作用密切相关。通过从空间测得它的速度和方向,我们可以研究全球范围内海洋大气相互作用。海洋–大气相互作用有助于保持平衡,这种平衡对于行星适居性至关重要。然而,传统的散射计不能测量海流矢量。为了实现这一目标,一个可行的方法是使用一个更大的天线,更高的脉冲重复频率,并测量两个连续回波的干涉相位。本文推导了四个去相关因素,并首先提供了相位误差模型。然后,建立一个端到端的仿真模型,用于分析海洋表面电流测量的可行性空间。基于仿真模型,对系统参数进行优化。仿真结果表明,当风速大于4米/秒时,意味着测量精度的海流速度标准差(标准差),在顺轨向和垂直航向小于0.1米/秒。当风速大于7米/秒时,距离向覆盖范围可用于海流矢量反演,精度大于70%时。同时,优化过的KPC计算的结果表明,当风速大于6米/秒时,辐射分辨率(KPC)要优于传统的笔形旋转波束散射计。
关键词:相干系数模型;海洋表面流;相位误差模型;散射计
- 引言
大规模的海洋环流是地球热收支与气候变异的基础。因此,海洋环流是一个研究热点,它能帮助我们更深入的理解气候变化。在开阔的海洋中,海洋表面流在一个额外的风力作用下作准地转运动。空间尺度从赤道10-100公里变化为50-200公里的中尺度涡活动,那代表着98%的海洋动能[1]。
用户对于海流信息的要求可以分为两部分。第一部分是操作要求。操作要求对于海流信息在行业上覆盖海上石油和天然气,航运,捕鱼,搜索和救援/污染响应,休闲,海军和电缆铺设。不同行业有不同要求。空间洋流的分辨率要求从1变化到10公里,时间分辨率要求改变1小时到几天。所有情况下,精确性要达到10厘米/秒,方向上要达到20◦,在航运业务上这些要求这可以轻微放宽。第二部分是研究要求。研究要求对海洋信息需求覆盖大尺度环流和气候,海岸过程、陆架海和短期海洋预报。根据散射计特点,用铅笔束旋转散射计测量海流可以用于大规模的研究,如全球环流和气候[1]。
现在大型的研究主要是基于运行分辨率下降到1/12或1/16的数值模型和子网格尺度过程的参数化。模型运行期间,卫星和现场测量被同化。海流数据的要求是既要同化也要验证输出模型。0.1米/秒的测量需要在空间分辨率为50公里,并更新至少每2天。
现场和高频地波雷达测量是海流观测的常用方法[2][3],但它们大多集中在近海地区,这表明它们不能提供全球范围内的海流数据。但现场和高频地波雷达测量可以有比较高的精度。海洋状态监测与分析雷达(OSMAR 2003)[4]是一个高频地波雷达,由武汉大学生产。海流速度测量的标准差约13厘米/秒。声学多普勒流速剖面仪(ADCP)[5]是一种可以用于测量海流剖面的设备。ADCP获得海流剖面主要通过测量声音的频率,测量精度优于10%。电磁式海流计也是一种现场测量传感器[6],它测量海流精度很高。测量误差可以小到1厘米/秒[7]。
星载合成孔径雷达(SAR)是一种多普勒雷达,能获取高分辨率海洋图像并已被用于实际应用,如波浪和风反演、油污染监测、船舶检验和海冰监测。多普勒质心异常分析和沿轨干涉测量技术可用于SAR海流测量[8][9]。装载在卫星上,SAR可以实现世界范围的观察。然而,SAR也会受限于数据量小,传输功率,因此它不能在高时间分辨率下实现全局覆盖。SAR系统和信号处理比真实孔径雷达要更复杂。
本文提出了散射计的系统参数改进和信号处理方法。通过用一个更大的天线和更高的频率,我们可以得到海面连续回波的干涉相位,据此可以计算出海流矢量。在第二节中,我们首先介绍测量原理和脉冲重复频率的限制。相关系数模型
和相位误差模型,然后在第三节提出四个去相关因素:1)热噪声去相关;2)不同的观察区域去相关;3)空间去相关;4)时间去相关。此外,选择独立干涉相位样本,相位和海流速度标准差的限制也给出。第四节给出脉冲序列和信号处理。第五节优化了脉冲重复频率和带宽的系统参数,并用不同风速模拟海流沿轨道和交叉轨道方向速度标准差,并用不同风速及不同风速精度计算出不同有效幅宽。第六节比较改良与传统散射计之间的散射KPC,第七节得出结论。
- 理论和脉冲重复频率的限制
- 理论
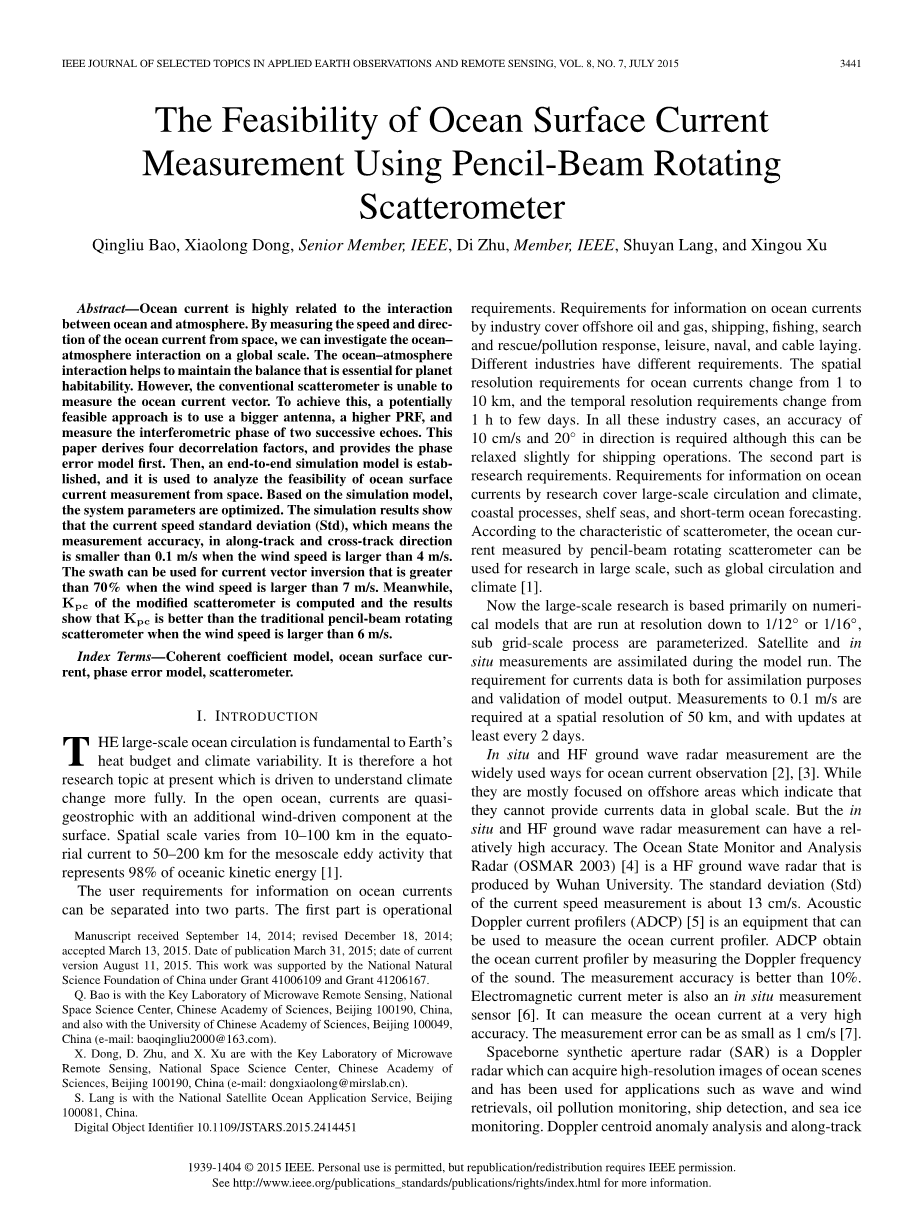
铅笔束旋转散射计的观测几何如图1所示。S点的代表坐标为(0,0,H)的散射计。点P表示目标,其坐标为。卫星的速度可以可表示为,和目标的速度可表示为。
图1:笔形旋转波束散射计观测方位角(a)三维(b)不同方位
使用图1(a)所示的几何图形,我们可以计算出雷达与目标相对径向速度
(1)
一般来说,一个负的VR值和逐渐远离雷达的目标有一定的联系。多普勒频率可以表示为:
(2)
连续两回波的时间间隔为1/脉冲重复频率。因此,干涉相位可以写为
(3)
从图1(b),我们发现每个目标都可以通过方位角ϕ和 pi; – ϕ观测到。因此,我们可以从目标phi;1和phi;2获得两干涉相位。
(4)
通过求解(4),我们得到的海洋表面流和
(5)
B 脉冲重复频率的限制
传统的散射计系统脉冲重复频率总是很低,比如,海风的频率大约是185赫兹;两个回波时间间隔是5.4毫秒[10][11]。脉冲重复频率是如此之小以致于连续的回波是相互独立的,它们的相关系数接近于零。为了获得干涉相位的两个连续回波, 天线必须做大并且脉冲重复频率必须更快。
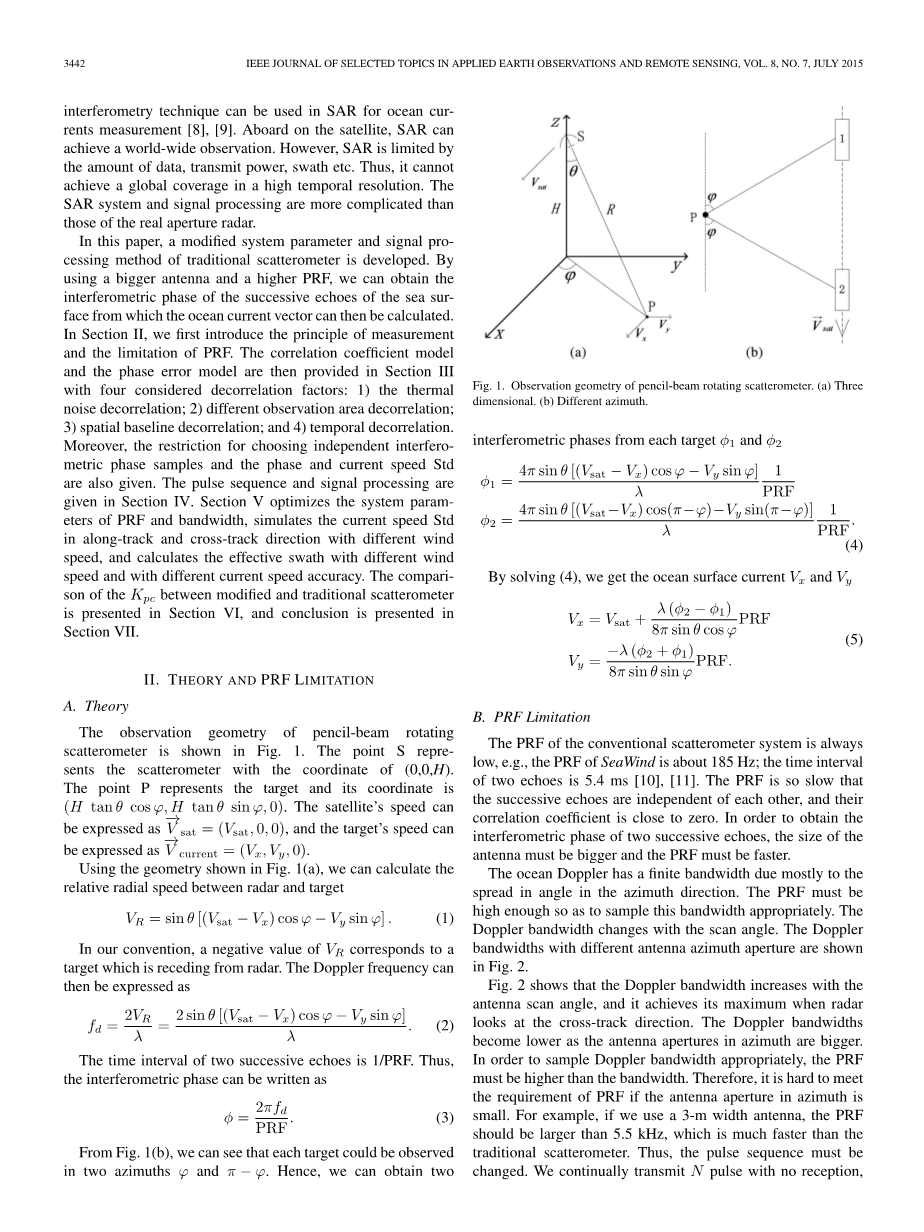
海洋多普勒有一个有限的带宽,主要是由于方位角的扩展。脉冲重复频率必须足够高,以便适当地采样此带宽。多普勒带宽随扫描角度而变化。不同的天线孔径方位的多普勒带宽如图2。
图2 不同天线孔径方位的多普勒带宽
图2显示的多普勒带宽增加与天线扫描角度的关系,在雷达扫描到交叉轨道方向时,多普勒带宽达到最大值。多普勒带宽随着方位角的天线孔径变大而减小。为了采集的多普勒带宽适当,脉冲重复频率必须高于带宽。因此,如果天线方位孔径变小,脉冲重复频率的要求便很难满足。例如,如果我们使用一个3米宽的天线,脉冲重复频率
应该大于5.5千赫,这远远快于传统的散射。因此,脉冲序列必须改变.我们不断地发送n个脉冲,没有接收,然后接收的回波没有传输。因此,我们可以在每个周期得到n个回波。n由径向距离和脉冲重复频率决定。V偏振和H偏振脉冲在交替周期中传输传输。
- 相关模型
我们定义在T0时刻,F(R,ϕ,T0)代表海洋表面每一点的复散射。
W(R,ϕ)是系统的脉冲响应,N是接收机热噪声。然后,回波S1在T0时刻可写为[12]
(6)
(7)
在lambda;是是微波的波长,h是雷达高度,R是径向距离,和ϕ是观察方位。在T0 T时刻,回波S2可以写为T = 1/脉冲重复频率,是两个连续回拨的时间间隔,和theta;是入射角。Drsquo;和D”分别 在(6)和(7)是积分边界,对应于两个回波的观测区域。Drsquo;和D”都可以分成两部分:
(8)
D表示两个观测的同一区域,D1和D2分别代表不同的观察地区.回波的S1和S2的复相关系数可以表示为[13][14]
(9)
表示集合平均。干涉相位可以从复相关系数可以得到,它是复相关系数角的期望
(10)
考虑到(9)式的分子,我们用(6)和(7)代入它,然后我们得到的两个回波的相关系数。如果表面包含均匀分布和不相关散射中心,那用(12)代入它。
(11)
是平均雷达后向散射系数。然后,两个回波的相关关系可以简化为:
(12)
回波S1和S2的自相关可以写为:
(13)
(14)
通过代入(12)、(13)、(14)到(9),复相关系数可以简化表示为去相关项的乘积。
(15)
从(15),我们可以得出结论,干涉相干可以分解成若干项的乘积。我们定义
重要组成部分如下:
1):信号中加噪声引起的去相关;
2):由于不同的观察区域引起的去相关;
3):不同观测几何的gamma;空间去相关;
4):由于表面散射特性变化引起的gamma;时间去相关。
A.热去相关
根据(15),可以简化热去相关[13]
(16)
图3 信噪比与相干性的关系
其中SNR为信噪比。我们看到SNR趋于无穷大(零噪声),然后相干趋于一致性;如果信噪比趋于零,那么相干也趋于零。图3显示了相干度与信噪比的关系。我们可以看到如果信噪比低于minus;6分贝,相关系数小于0.2。在低风速条件下,布拉格反向散射是小的,热去相关将是主去相关因子。
B不同的观测区域去相关
由于卫星速度和天线扫描速率,这两个回波(S1和S2)有不同的观测区域。由(15),不同的观察区域去相关可写为:
(17)
对于典型的雷达模型,系统脉冲响应大约是[ 12 ]
(18)
和表示距离和方位分辨率,sinc函数功能是。
分辨率失配去相关可以表示为[15]和[16]
(19)
在和是两观测方向距离和方位的相对位移。图4显示了是相干系数和和的相关性。我们发现范围和方位方向0.1的相对位移导致相关系数损失0.03。在两个连续回波的时间间隔中,卫星飞行距离和天线扫描角度远小于范围和方位分辨率。因此,不同的观测区域去相关影响对相干性影响不大。
图4 相干与相对方位和方位角方向的关系
图5 脉冲重复频率与相干度在不同观测方位角下的关系
C.空间去相关
干涉相位从两个连续回波计算得出,但这两个观察有不同的几何形状。他们的位置差是卫星速度和时间间隔的乘积,表示为B = VSAT/脉冲重复频率。同样地,系统脉冲响应可以近似(18),然后空间去相关可以简化为(20)[ 13 ],[ 17 ](表示在下一页的底部)。我们可以发现,空间去相关是复杂的,它的大小与基线长度B和观测值方位ϕ有关。不同的观测方位下,脉冲重复频率与相干性的关系如图5所示。图5中0°90°分别代表顺轨和轨道交叉方向。图5显示作为天线从沿轨道方向扫描到交叉轨道方向,相关系数将降低。当脉冲重复频率比多普勒带宽小,相干性趋于零。脉冲重复频率脉冲长度和波束覆盖范围距离向宽度限制。如果我们使用频率更高的脉冲重复频率,脉冲长度必须短,然后我们得到一个较小的信噪比,这和热去相关直接相关。因此,脉冲重复频率必须优化,这将在第四节详述。
(20)
D.时间去相关
观察期间,海表面散射特征的变化引起时间去相关。在中等入射角,海洋表面的布拉格波与电磁波共振。多普勒频移总是由布拉格波相位速度决定的。如果没有表面流和较长的波,多普勒谱由布拉格波的相位速度相关的两条线组成,这两条线的大小和布拉格波高谱密度成正比。同时,存在海洋表面流时,这两条线在同一方向将有一个额外的频移。在真实海面上,两个理想化的多普勒谱线将随着比布拉格波长的海波的轨道运动而扩大。相位变化和时间去相关依赖于多普勒谱。(15)中的时间去相关可以表达为[18]-[20]。
(21)
其中表示多普勒频率和表示概率密度分布,命名为多普勒谱,T是两个连续观测的时间间隔。多普勒频谱与微波频率、入射角、观测方位和风速有关。我们用Bjerkaas–Riedel海洋波谱来模拟海洋多普勒谱[21]并假设没有海洋表面流。多普勒频谱和海洋表面自相关如图6所示。从图6,我们可以看到,时间去相关当风速较大时减小速度更快。如果脉冲重复频率是大于8千赫,两个连续观测的时间间隔小于0.125毫秒。在风速小于21米/秒时,时间去相关是小于0.01,因此,时间去相干的影响不大。
图6(a)多普勒频谱和(b)时间去相关(载波频率13.5 GHz,入射角45°,观测方位75°,风速7米/秒)
E相位误差模型
从(16)到(21),我们发现和是真实存在的、和是复杂的。因此,gamma;的相位可以分解为三个部分:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[25784],资料为PDF文档或Word文档,PDF文档可免费转换为Word

