
英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
融合沿海处多个卫星观测数据与现场观测海温数据
YI CHAO与 ZHIJIN LI
加利福尼亚理工学院喷气推进实验室
JOHN D. FARRARA
加利福尼亚州洛杉矶分校地球系统科学与工程联合研究所
PETER HUNG
加利福尼亚理工学院
(手稿于2007年7月31日收到,截至2008年11月22日)
摘要
在融合多个观测平台的海表温度(SST)数据时,二维变分数据同化(2DVAR)方法被提出。2DVAR方法可以产生连续场,并且具有融合多个卫星数据和现场观测数据的能力。此外,它能保留近岸流背景相关非均匀性与各向异性的这样的常见特征。此次研究采用2003年8月在加利福尼亚中部沿海地区的卫星观测SST数据与现场观测SST数据,并通过2DVAR算法成功融合了SST场,其分辨率在空间尺度上为6公里,时间尺度上为6小时,实验成功证明和评估了2DVAR方法在融合SST数据方面的效用。通过比较融合结果与观测结果,表明SST观测值本身存在的误差相当于均方根误差,均小于1℃。融合SST场能够清晰地显示其时空结构与沿海上升流存在相关性,这证明了融合SST场在分析海流中的效用。伴随着高的时间分辨率,融合SST场也可用于描述日变化。2DVAR算法在其他沿海地区也存在潜在应用。
1.引言:
近年来,用于测量海表温度(SST)的多个仪器已经在卫星上建立。已经确定的是,通过融合来自多个卫星的海表温度数据和现场观测数据可以产生高质量的全球SST。这样的全球融合SST在气候分析和海-气相互作用的研究中发挥了重要作用。受到全球融合SST的成功的启发,2DVAR方法在融合沿海SST的方面存在开发潜力。
沿海海域在空间尺度上具有从几公里到几十公里的海流系统,时间尺度则为几小时到几天。为了分析这种精细的空间结构和时间演变,所需的融合SST场必须具有几公里的空间分辨率、几小时的时间分辨率以及足够的精度。但此处存在一个核心问题,即现有的卫星和现场观测平台是否能够产生覆盖率足够大的SST数据,从而能够确保成功融合SST场。
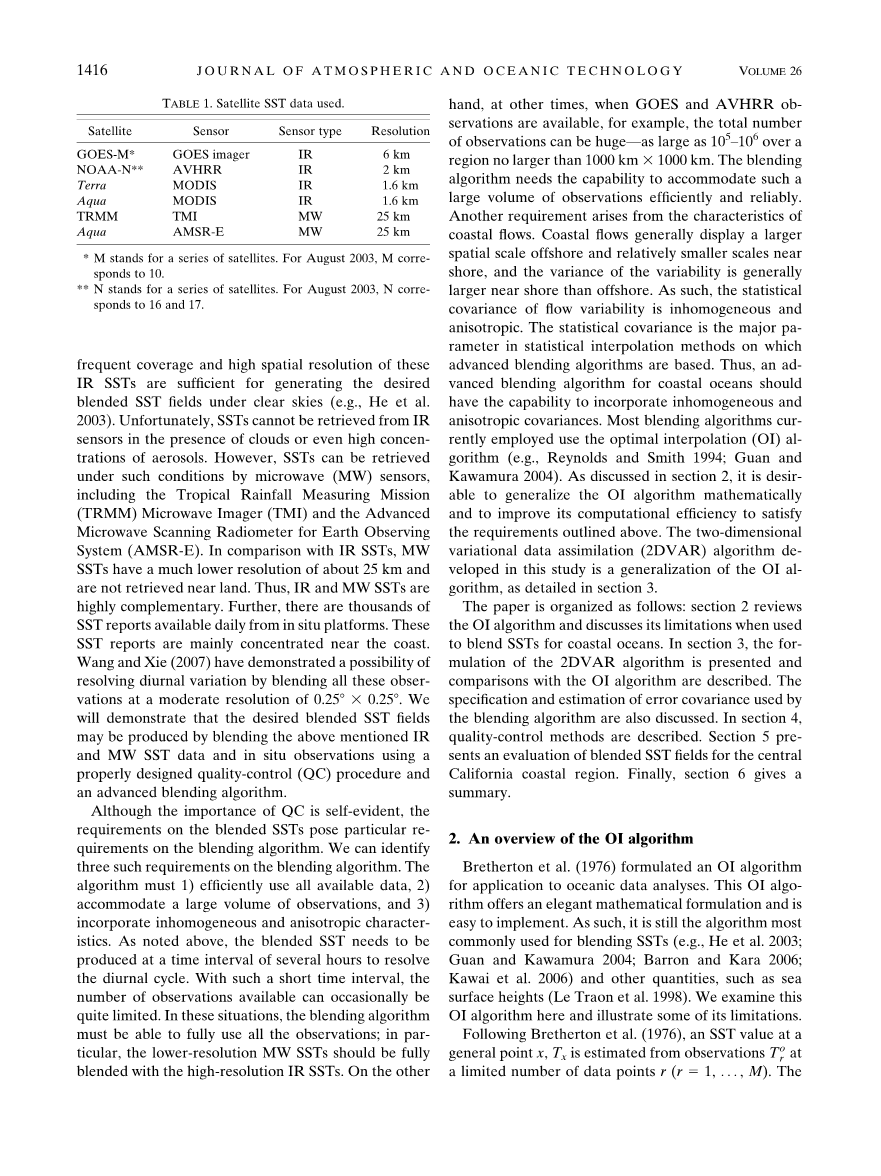
表1:使用的卫星SST数据
|
卫星 |
传感器 |
传感器类型 |
分辨率 |
|
GOES-M* |
GOES imager |
IR |
6km |
|
NOAA-N** |
AVHRR |
IR |
2km |
|
Terra |
MODIS |
IR |
1.6km |
|
Aqua |
MODIS |
IR |
1.6km |
|
TRMM |
TMI |
MW |
25km |
|
Aqua |
AMSR-E |
MW |
25km |
目前已经有超过10颗卫星携带SST传感器。表1总结了我们在本研究中所使用数据的卫星。同时表1还列出了传感器的类型。来自地球静止环境卫星(GOES)系列的数据具有6km的空间分辨率和30min的规律性的时间分辨率。GOES成像器即红外(IR)传感器。红外传感器由其他卫星承载,包括超高分辨率辐射计(AVHRR)和中等分辨率成像光谱辐射计(MODIS)。 AVHRR和MODIS SST的空间分辨率高达1-2km。这些传感器兼具IR SST的覆盖规模以及高空间分辨率特征,足以在清澈的天空下产生融合SST场所需的数据资料(He et al.2003)。可惜的是,在云或其他高浓度的气溶胶的影响下,SST不能通过红外传感器来检索。然而,SST可以在这样的条件下由微波(MW)传感器检索,包括热带降雨测量(TRMM)微波成像仪(TMI)和用于地球观测的高级微波扫描辐射计(AMSR-E)。与IR SST相比,MW SST的空间分辨率相对较低,约25km,并且在陆地附近不能检索到海温。因此,IR和MW SST是高度互补的。此外,现场观测平台每天可提供数千份SST数据资料,这些SST资料主要集中在海岸附近。Wang和Xie(2007)以0.25°*0.25°的中等空间分辨率融合了以上所有的卫星观测资料,最终提出了解决日变化这个问题的可能性。我们将通过使用质量控制(QC)方法和高级融合算法,融合上述IR和MW SST数据和现场观测数据,从而产生所需的融合SST场。
虽然QC的重要性是不言而喻的,但在融合SST时我们对融合算法提出了特殊要求。目前我们可以总结融合算法的三个这样的要求。该算法必须1)高效地使用所有可用数据,2)适应大量的观测,以及3)包括背景相关非均匀性和各向异性特征。如上所述,融合SST需要在几个小时的时间间隔内产生从而解决日变化问题。在这样短的时间间隔内,可用的观测数据的数量可能相当有限。在这些情况下,融合算法必须能够充分利用所有的观测资料;其中较低分辨率的MW SST应当与高分辨率的IR SST进行完全融合。另一方面,在其他时间,例如,当GOES和AVHRR观测数据可用时,在不大于1000km*1000km的区域内,观测的总数可以是巨大的,约105-106,融合算法需要能够有效地且可靠地适应这样大量的观测。另一个要求源自沿海流的特性。沿海流域通常在离岸处具有较大的空间尺度,近岸处具有相对较小的空间尺度,变化的方差在近岸处通常比离岸更大。因此,流变率的统计协方差存在背景相关非均匀性与各向异性特征。统计协方差是基于高级融合算法的统计插值方法中的主要参数,因此,沿海流域的融合算法应该具有纳入背景相关非均匀性和各向异性协方差的能力。近期在融合算法的应用中大多数使用最优内插值算法(OI),如第2节中所讨论的,期望OI算法得到推广并且提高其计算效率从而满足上述要求。在本研究中使用的二维变分数据同化(2DVAR)算法是OI算法的一般化,详见第3节。
本文的组织结构如下:第2节回顾了OI算法,并讨论了OI算法在沿海处融合SST的局限性。在第3节中,给出了2DVAR算法的公式,并对2DVAR算法与OI算法进行了比较,同时还讨论了融合算法所使用的协方差误差的规范和估计。在第4节中,描述了质量控制方法。第5节介绍了对加利福尼亚中部沿海地区的融合SST场的评价。最后,第6节对全文进行总结。
2. OI算法的概述
Bretherton 等人(1976)制定了一种用于分析海洋数据的OI算法。这种OI算法作为易于实现的数学公式,目前是融合SST最常使用的算法。我们在这里检验OI算法,并说明它的一些局限性。
根据Bretherton et al(1976),在点处的SST值可通过有限数量的数据点处的观测值来估计得到。观察值是观测值加上一些观测误差,其中。我们还引入背景值与公式 ,其中, 是背景误差。
然后,通过高斯马尔科夫定理表明,的最小二乘法最优线性公式为
(1)
其中是观测点和之间的背景协方差误差,其计算由下式给出
(2)
这里,尖括号代表统计学意义。其中是协方差矩阵A的逆矩阵,并且
(3)
是和点之间的背景协方差误差。
公式(1)-(3)是相当普遍的。由(1)给出的估计值可以作为下一部分中在高斯分布假设下所解决的最小误差方差解或最大似然解。然而,在用于融合沿海海域的卫星SST时,该公式受到严重的限制。
第一个限制与SST数据资料的不同分辨率有关。OI算法要求对SST进行逐点测量。然而,卫星传感器并不是逐点测量SST,而是测量某个区域上的平均值,SST会因为传感器类型,数据取平均值所采取的区域大小而不同。例如,目前MW传感器测量0.25°*0.25°范围内的平均值,而IR传感器测量相对更小面积上的平均值。因此,不同的卫星产生的SST数据具有不同的分辨率。由(1)给出的公式不能直接融合不同分辨率的SST。当前在使用(1)的过程中通常采取特殊方法来规避这种问题,在这种特殊方法中,低分辨率SST数据通常作为点观测,但是它仅在没有更高分辨率或没有现场观测数据可用的情况下使用(例如,Guan和Kawamura 2004),当存在其他更高分辨率的SST数据可用时,MW SST将不能被有效地使用;另一方面,当没有分辨率较高的SST数据可用时,分辨率较低的SST数据可能使融合SST变得相对平滑。为了使用(1)融合不同分辨率的卫星SST,在此期待(1)的数学公式得到推广。
第二个限制与沿海海域的背景相关非均匀性有关。 背景相关非均匀性在沿海海域中无处不在并且具有显著性,主要特征之一为相关性在海岸附近具有比离岸处更小的尺度(Li et al.2008b)。虽然公式(3)允许存在非均匀协方差误差,但是依旧难以实现计算。当融合SST的网格点数量较大时,由于没有足够的数据用于估计和的协方差矩阵,此时计算会出现困难。此外,在计算机上进行存储时和由于尺寸极大也会存在一定的阻碍。为了解决以上问题,一种方法是对它们进行参数化,并在分析函数的基础上构建协方差误差矩阵,例如高斯函数。然而,使用这种方法建立满足协方差对称性质的非均匀性协方差矩阵(Carter and Robinson.1987)是非常复杂的。事实上,Bretherton等人(1976)并没有给出公式(4)和公式(5)中和的一般形式,而是直接将它们作为具备均匀性和各向同性特征的形式进行定义。
最后一个限制是计算难度。当(1)用于融合SST时,因为M * M的矩阵A在计算中必须被反演,所以计算难度取决于观测值M的数量。当M变大(gt; 105)时,A的反演过程会非常耗时,计算也会存在更大的困难,也就是说,面对这种情况现有的反演算法无法正常使用。目前存在许多方法可以避免这些由大量的观测所产生的计算困难。方法之一是通过将大区域划分为更小的子区域,然后在每个子区域上实现OI算法。当M在子区域中变得足够小时,A的反演是在控制范围内的。然而,划分后的子区域融合生成的SST需要拼接在一起,这在分区边界附近可能产生误差。通过给定以上这些问题, OI算法实际上不可能通过大量观测数据来实现计算。
在此我们提出了二维变分数据同化算法。该算法不受第一限制和第三限制的影响,并且在减轻第二限制方面存在极大的灵活性。
3.制定2DVAR算法
2DVAR算法与OI方法(Lorenc.1986)具有相同的数学原理,但两者在数值实现方面是不同的。主要区别在于2DVAR能够利用先进的大规模数值优化方法。
将融合SST场定义在给定的规则网格上。网格可以在各种坐标中,比如纬-经度或任何曲线坐标,一旦选择了坐标,我们对包含所有网格点处SST的维空间向量进行定义,其中是网格点的总数。
之后制定2DVAR算法,通过对T的成本函数的最小化来求求解融合SST:
(4)
其中是背景,是观测值,N是SST观测值的数量,是的协方差误差,是的观测协方差误差。值被称为观测运算符,它能够将融合SST映射到观测位置。函数可以根据最大似然估计来推导(Jazwinski.1970)。因此,该解就是最大似然估计。
在实践中,我们很难直接对公式(4)进行最小化。通常会应用一些变换来提高数值最小化的性能。在此我们引入增量, 然后成本函数转变为
(5)
其中定义为修正向量。
在函数(5)中和是矩阵,由于他们尺寸很大,在实践中通常需要简化。在大多数情况下,可以简化为对角矩阵,其内部元素为观测误差方差,而具有很大的密集度。为了说明的特性,我们将分解为,其中是对角矩阵,对角元素是的均方根误差(RMSE),是相关矩阵,其元素由网格点之间的空间相关性组成。在具体实验中我们使用气候性月平均值作为背景值。对于这样的背景值,误差相关性就是总SST相关性。更重要的是,空间相关性发挥了从观测地点到周边地区的信息传播的作用。因为的密集度很大,从而它的反演在实际上是不可能实现的,因此有必要对进行特殊的简化,从而令公式(5)可以用于执行数值最小化。
在这里,我们引入,按照Li等人提出的方法 (2008a),假设相关性在沿岸和离岸方向是可分离的情况下,可以作为一个相关矩阵。有了这个假设,的形式转变为,其中代表Kronecker产品(Graham.1981),和分别是离岸和沿岸方向的一维相关矩阵。在此引入Cholesky分解,其中是Cholesky三角矩阵。根据Kronecker积的性质,可以计算为,其中和分别为和的Cholesky三角矩阵,即和。因为和是一维矩阵,所以和的Cholesky因式分解可以被有效地执行。
通过引入变换,我们可以得到以下公式
(6)
公式(6)显示了两个主要优点。第一个优点是不需要对进行反演计算,因为这个优点我们可以在构造时拥有更大的灵活性。第二个优点是我们能够将最小化算法应用于公式(6)。
<p
剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[26913],资料为PDF文档或Word文档,PDF文档可免费转换为Word

