
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
Suomi NPP卫星先进技术微波探测仪在数值天气预报和热带气旋研究中的应用简介
[1] Suomi NPP卫星在2011年10月28日成功发射升空。搭载在Suomi NPP的先进技术微波测深仪(ATMS)是一种跨轨道扫描仪器,具有22个通道,中心频率位于23 GHz到183 GHz之间,可以在晴朗和少云天气条件下探测大气的温度和湿度。ATMS从之前的微波探测仪继承了大部分探测通道,包括搭载在美国国家海洋与大气局NOAA卫星和欧洲共同体气象卫星计划业务卫星MetOp 卫星上的先进微波温度计(AMSU-A)和微波湿度探测仪(MHS)。但与其它微波探测仪相比,ATMS具有更宽的扫描范围,并且两个连续的轨道之间没有间隙。ATMS还有一个新的温度探测通道和两个水汽探测通道,尤其在热带气旋这样的风暴条件下,它能够提供对对流层低层热力结构更多的观测细节。然而,由于ATMS温度通道的积分时间比AMSU-A的短,因此噪音会比AMSU-A高。另外,ATMS重叠视场的观测可以被重新采样以产生类似AMSU-A的观测。
1. 引言
[2] 在2011年10月28日,S-NPP卫星成功发射进入一个圆形的,近极地的,升轨越赤道时间为(1:30 P.M. 10 minutes),也称为下午星,轨道高度为824公里,与赤道的倾角为98.7。S-NPP卫星的主要目标是:(1)提供由地球观测系统Terra、Aqua和Aura任务发起的一组地球系统的延续观测;(2)为操作预测团体提供选定的JPSS仪器和地面处理数据系统的操作前风险降低、演示和验证。搭载在S-NPP 上的先进技术微波探测仪(ATMS)协同跨轨扫描红外探测仪(CrIS)共同观测,除了微波探测能力被大雨滴和冰粒子的散射特征大大削弱的强降水条件,两个仪器能够有效探测在晴空和少云条件下的大气温度和湿度。 ATMS和CrIS 能够为数值天气预报(NWP)提供更多有用的观测信息,从而进一步提高短中期天气预报的水平。
[3] ATMS校准数据,包括原始数据、地理位置、遥测和house-keeping 数据,自从Suomi NPP发射以来,已经在NPP接口数据和处理部分(IDPS)进行了全面处理。在2012年1月13日举行的ATMS小组审查中,得出结论,ATMS数据已达到测试水平。通过更加密集的校准工作,TDR数据接近于提供版本,并且可以被应用于多个方面。ATMS天线温度数据记录(TDR)和传感器数据记录(SDR)辐射资料现在正从NOAA的综合大型阵列数据管理系统(CLASS)分发给用户。
[4] 本文描述了ATMS的数据精度、通道特点和新的视场特点,首次全面展现ATMS仪器特点。NOAA-18上的ATMS和AMSU-A反演的云液态水路径(LWP)进行了比较。在晴空条件下,检测了海洋上空中高层探测通道ATMS TDR的扫描相关偏差。此外,还将全套ATMS探测通道的信息内容与AMSU-A/MHS类通道的信息内容在热带气旋内部和周围了进行比较。更多关于ATMS校准和验证(CalVal)的研究将通过ATMS CalVal团队成员的一系列科学论文进行展示。
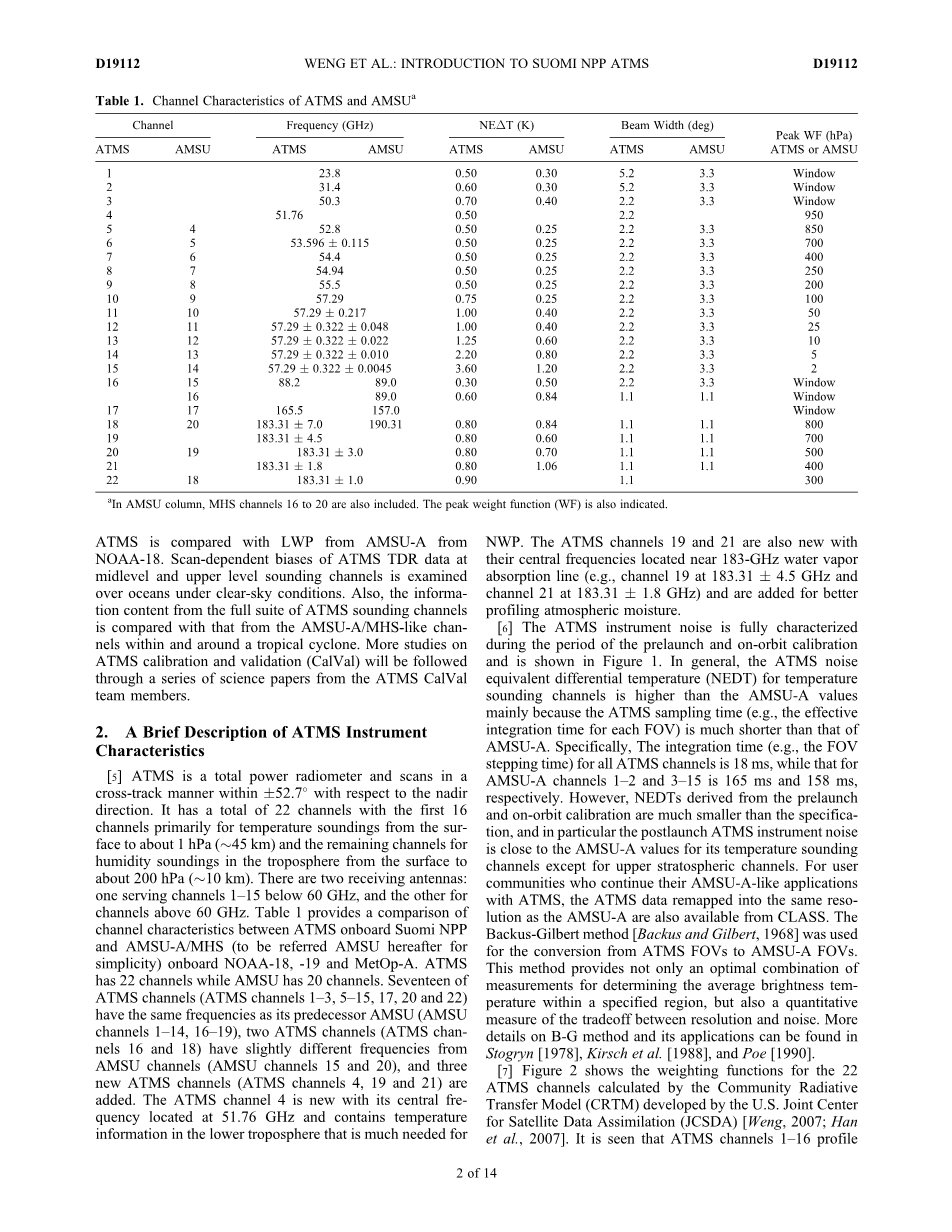
表1 ATMS和AMSU通道特性
2. ATMS仪器特性简述
[5] ATMS是一个总功率辐射计,它以交叉轨道的方式相对于星下点方向在内进行扫描。它共有22个通道,前16个通道主要用于从地表到大约1 hPa (~45km)的温度探测,其余通道用于从地表到大约200 hPa(10km)的对流层湿度探测。有两个接收天线:一个用于60 GHz以下的通道1-15,另一个用于60 GHz以上的通道。表1提供了Suomi NPP上的ATMS与NOAA-18、-19和MetOp-A上的AMSU-A/MHS(为了简单起见,下文中将称为AMSU)之间的通道特性的比较。ATMS有22个通道,AMSU有20个通道。17个ATMS通道(ATMS通道1-3、5-15、17、20和22)具有与AMSU(AMSU通道1-14、16-19)相同的频率,两个ATMS通道(ATMS通道16和18)与AMSU通道(AMSU通道15和20)的频率稍微不同,ATMS还添加了三个新的通道(ATMS通道4, 19和21)。ATMS通道4的中心频率为51.76 GHz,包含着数值天气预报所需要的对流层底层的温度信息。ATMS通道19和21的中心频率在183 GHz 左右的水汽吸收线(通道19在183.314.5 GHz,通道21在183.311.8 GHz),它们被用来更好的探测大气湿度。
[6] ATMS仪器噪音在发射前和在轨校准期间得到了细致的分析,如图1所示。一般来说,温度通道的ATMS噪音等效差分温度(NEDT)高于AMSU-A值,主要是因为ATMS采样时间(例如,每个视场FOV的有效积分时间)比AMSU-A短得多。特别地,所有ATMS通道的积分时间(例如,FOV时间步长)为18ms,而AMSU-A通道1-2和3-15的分别是165ms和158ms。然而,由发射前和在轨校准得到的NEDTs比规范小得多,特别是发射后,除了平流层上部通道外,ATMS仪器的噪音和相对应的AMSU-A温度通道非常接近。Backus-Gilbert方法[Backusand Gilbert,1968]用于从ATMS FOV到AMSU-A FOV的转换。该方法不仅提供了用于检测特定区域内的平均亮度温度的测量最佳组合,还提供了分辨率和噪音之间的折衷的定量测量。更多关于B-G方法及其应用的细节可以在Stogryn [1978]、Kirsch[1988]和PoE[1990]中找到。
图1 ATMS 噪声等效差温 (NETT) 与 AMSU-A/mhs 的比较。 x 轴上显示的是 ATMS 通道号, 图中以蓝色显示 AMSU 通道号
- 图2展示了由美国卫星数据同化联合中心(JCSDA)开发的通用辐射传输模式(CRTM)计算的22个ATMS通道的权重函数 [Weng, 2007; Han et al., 2007]。可以看出,ATMS通道1-16对从地表到0.1 hPa中的大气温度进行了观测,通道17-22则是主要观测对流层中的水汽信息。ATMS通道1-4和16-17接近大气窗区,主要受来自地表和地面大气的辐射影响。表2提供了用美国标准大气廓线计算的大气对总辐射的贡献的估计。ATMS通道1-3的地表辐射贡献值大约为89%,94%和65%。较地表通道1-3,新增添的ATMS通道4有更多来自大气的辐射贡献。
图2 ATMS 22通道的权重函数
[8] AMSU通道1-15和16-20的波束宽度分别为和。ATMS通道3-16的波束宽度为,比AMSU温度通道1-15小。然而,ATMS地表通道1-2的波束宽度为,远远大于相应的AMSU通道1-2。在60GHz以上的7个ATMS信道中的6个通道,通道17-22,具有的波束宽度,这与AMSU水汽通道16-20相同。
[9]以上提到的ATMS和AMSU通道波束宽度的差异,还有Suomi NPP(824km)和NOAA-19(870km)等先前者卫星高度的差异,导致了ATMS和AMSU之间视场FOV大小的显著差异(如图3)。ATMS和AMSU之间最大的视场差异在ATMS/AMSU通道1-2。通道1-2中,单个ATMS视场的直径大约是AMSU的1.6倍,这主要是由两个仪器的波束宽度差异决定的。AMSU视场在相邻的视场或者扫描线之间没有重叠,但是ATMS视场和通道1-2扫描线有显著的重叠。
图3 ATMS (顶部) 通道 1-2的 FOV, 光束宽度为5.2度, (中间) 通道 3–16, 光束宽度 2.2,度 (底部) 通道 17–22, 光束宽度1.1度, 还显示了NOAA-18上AMSU-A和MHS的FOV
[10] AMSU通道3-15的单个视场大约是ATMS通道3-16单个视场大小的1.5倍。在这些通道中,单个ATMS视场与其周围的四个视场有重叠。ATMS和AMSU水汽通道视场的差异非常小。ATMS和MHS在积分时间上小的差异(ATMS 18ms;MHS 19ms)。
[11] ATMS的过采样特性将以高于或低于原始ATMS数据的分辨率观测亮温。然而,当在研究特定的天气系统时,在理想分辨率和数据噪音之间最优的平衡需要考虑进去。
3. 偏差特征
[12] ATMS数据的一个重要应用就是通过资料同化来提高数值天气预报技术。所有的资料同化方法都会在假设观测和模拟都是无偏的情况下运用最大似然估计或者最小方差估计的方法。在卫星数据同化中,必须量化并消除与仪器和正演模拟有关的任何偏差。因为观测和模式模拟的加权差,O-B,在资料同化中是最小化的,观测偏差()和模拟偏差()可以如下列等式结合:
(1)
[13] 因此,O-B统计量可以用来测量观测和模拟的偏差之和。
[14] ATMS数据偏差的评估需要正向辐射传输模式,它用于计算对任何给定大气状态(例如,温度和水汽廓线)和地球表面性质(例如,地表温度、地表发射率、地表风速等)在大气层顶部的22个ATMS通道的微波辐射。在本研究中,CRTM和国家环境预测中心(NCEP)全球预测系统(GFS)的6小时预测被用来研究偏差特点。NCEP GFS 6-h预报场水平分辨率为0.31250.3125,垂直方向为64层。最高垂直高度约为0.01 hPa。
[15] 用数值天气预报分析或预测场,通过CRTM模拟的亮温在晴空条件下的海域是最准确的。在本研究中,使用2011年12月20日至27日晴空条件下的ATMS观测资料来刻画ATMS测温通道5-15的性能。为了检测受云影响的ATMS视场地测量,一个类似于Weng等人[2003]为AMSU-A发展的算法,被用来从ATMS通道1和2的测量中反演大气云液态水路径。如所证明的,在低频窗区通道的微波测量可以直接与云液态水路径和水汽路径(WVP)基于发射的辐射传输模式[Greenwald et al., 1993; Weng and Grody, 1994, 2000; Weng et al., 1997; Wentz, 1997; Grody et al., 2001; Weng et al., 2003]联系在一起。从GFS预报场出发,地表参数(如发射率和温度)对两个ATMS通道测量的影响也被考虑了进去。特别地,云液态水路径可以通过如下公式进行反演:
(2)
其中,
和分别代表了在23.8和 31.4赫兹通道的亮温,是海表温度(SST),是水汽质量吸收系数,是云液态水质量吸收系数,是光学厚度,是地表发射率,,其中是卫星天顶角。
[16]不同扫描角度()的云液态水路径是通过(2)式计算的。卫星天顶角()和扫描角()存在一一对应的关系:,H是Suomi NPP卫星的高度,R是地球半径。跨轨扫描ATMS的肢体效应由(2)中的因子自动关注。
[17] 图4显示了来自ATMS和AMSU-A的通道1和2的亮温的全球分布(图4a-4d)以及2011年12月20日上升节点的云液态水路径检索,它由用(1)式从通道1和2导出。这两个窗区通道对地表(如地表发射率和地表温度)的敏感度,在陆地和海洋之间形成了鲜明的对比。由于大量的表面发射,陆地上的亮温高于海洋上的亮温。因此,大气对海洋总辐射吸收的相对贡献高于陆地,导致海洋上的亮温的扫描依赖性强于陆地。从ATMS推导出的全球LWP分布(图4e)与AMSU-A衍生的LWP相比有利(图4f)。ATMS提供了几乎连续的全球LWP分布,而AMSU-A在低纬度地区具有大的轨道间隙。LWP大值的空间特征(图4e和4f)可以在通道2的亮度的全球分布(图4c和4d)中看到,通道2是LWP检索的主要通道。通道1对大气水汽路径最为敏感,通常在少云的区域很高。
[18] 用0.05 kg/的LWP值作为检测受云影响的ATMS探测通道的阈值。一个LWP值小于这个阈值的ATMS探测通道被视为清楚的FOV[Weng et al.,1997]。在研究期间,在全球任意一个11的网格中的数据计数超过250。
[19] ATMS数据与其前身AMSU-A之间的差异可以从ATMS原始数据和重新映射数据之间的差异推断出来。我们首先检测了ATMS原始数据和重新映射数据之间观测分辨率的差异(图5)。ATMS在星下点的FOV直径是31.6 km,而重新映射的数据FOV直径是48.6 km。跨轨方向的视场大小比沿轨方向的视场大小增长得快。原始和重映射的ATMS TDR之间的沿轨道FOV大小的差异相对于扫描角度几乎保持恒定,而原始和重映射数据之间的跨轨道FOV的大小差异随着扫描角度的增加而减小。ATMS跨轨和沿轨方向的FOV的大小在最大扫描角(例如,)下分别是136.7 km 和60 km,然而重新映射数据在最大扫描角(例如,)下的跨轨和沿轨方向的视场大小分别是155.2 km和85.6 km。
[20] ATMS重映射数据是ATMS原始数据的加权平均值。ATMS原始数据和重新映射数据之间的观测分辨率的差异改变了观测和模型模拟之间差异的动态范围和标准偏差(O-B)。图6显示了O-B对ATMS通道6的温度依赖性的散点图。结果显示,相对重新映射数据,ATMS原始数据有一个更大的分布。这部分是由于较高的通道噪音,部分原因是GFS场没有捕获到时间快速变化的真实大气的小尺度特征,并且平均值提高了卫星数据和模型模拟之间的一致性。注意到,相同FOV数内的O-B数据点相对于观察到的亮温值(图6a和6c)似乎有所增加,但不是相对于模拟的亮温,特别是在星下点附近。 这是因为观测的变异性大于模型模拟中的变化,特别是在星下点附近,ATMS通道6的最大权重函数高度是最低的。相同FOV的观
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[18135],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

