英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
文章介绍了一种基于多超声波传感器的自主移动机器人定位方法——沈明奇、王玉英、江燕丹、海峰集、王宝良、黄志耀 * 国家控制科学与工程学院工业控制技术重点实验室,杭州310027浙江大学,shenmq@zju。中国教育网; yy _ wang@zju。Edu. cn (y.w.) ; ydJiang@zju.中文网(y.j.) ; hfji@zju。网址: edu. cn (h.j.) ; wangbl@zju。中国教育网(b.w.) * 通讯: zy _ Huang@zju。电话。: 86-571-8795-2145收到: 2019年11月2日; 接受: 2019年12月15日; 发布: 2019年12月18日摘要: 这项工作为自主移动机器人提出了一种基于多超声波传感器的新定位方法。与传统的超声定位方法不同,该方法在不增加温度信息的情况下实现了更高精度的超声定位。三个超声波传感器用于定位。建立了一般传感器配置的广义测量模型。针对线性/简化传感器结构,建立了考虑计算复杂性的简化测量模型。
从三个超声波传感器获得三个飞行时间信号。通过飞行时间比值计算目标的坐标。通过定位实验验证了该方法的可行性和有效性。实验结果表明,新的超声定位方法是有效的,两种模型均能成功实现定位,定位精度令人满意。与采用默认超声速度的传统超声定位方法相比,该方法定位精度大大提高。与附加温度补偿的超声定位方法相比,所提方法得到的结果具有可比性。关键词:
- 介绍随着计算机科学、自动控制技术和人工智能的发展,自主移动机器人已广泛应用于工业、物流和军事领域。定位是关键技术之一。
- 目前,光学方法和超声波方法是两种主要的定位方法[1-7]。与光学传感器相比,超声波传感器具有低成本、低功耗和低计算复杂度的优点[8-10]。此外,超声波传感器可以用在不透明/非透明的环境中,因为光学传感器难以工作[11-15]。然而,超声波传感器的测量精度不高。环境温度容易影响超声波传播速度。如果环境温度未知,在实际应用中会出现不可忽略的测量误差[16-19]。在过去的几十年中,人们进行了大量的研究来提高基于温度补偿方法的超声定位系统的精度[12,20-27]。最简单的方法是在超声波传感器附近安装一个温度传感器[12]。根据超声速度与温度的关系,可以对超声速度进行补偿。信二和俊亚提出了一种基于声学计算机层析成像的横截面温度和风速分布测量方法[23]。钱德和夏尔马提出了一种补偿方法的基础上比较一个未知的距离与一个标准的距离在相同的媒介[24]。黄和杨提出了一种精确的超声波测距系统,该系统对空间环境平均温度进行自动温度补偿[25]。
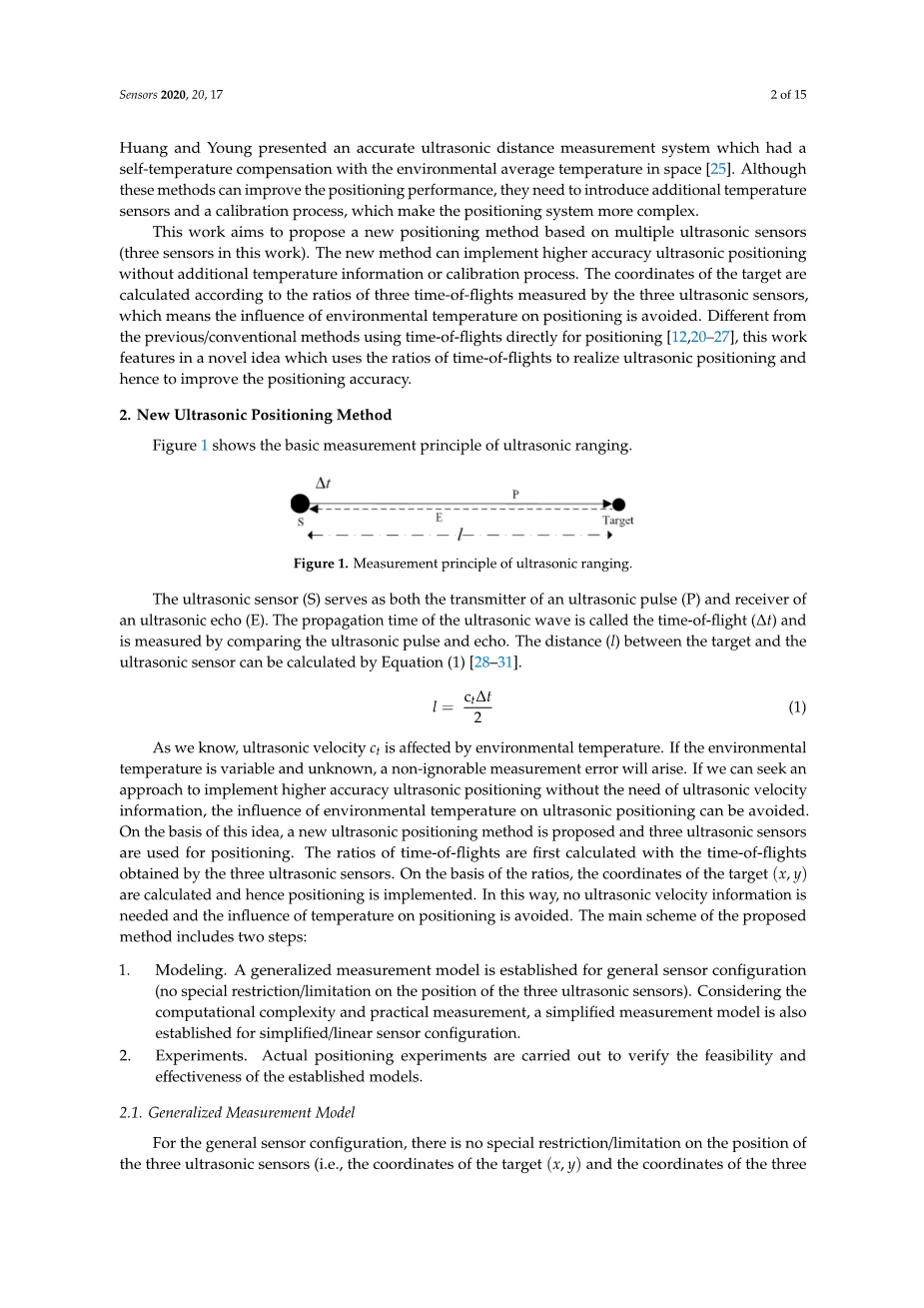
- 虽然这些方法可以提高定位性能,但需要引入额外的温度传感器和校准过程,使定位系统更加复杂。该方法不需要额外的温度信息或标定过程,可以实现更高精度的超声定位。根据三个超声波传感器测得的三次飞行时间的比值重新计算目标的坐标,避免了环境温度对定位的影响。与以前/传统的直接使用飞行时间定位的方法不同[12,20-27] ,这种方法的特点是利用飞行时间比来实现超声波定位,从而提高定位精度。新的超声波定位方法图1显示了超声波测距的基本测量原理所述超声波传感器同时作为超声波脉冲(p)的发射器和超声波回波(e)的接收器。超声波的传播时间称为飞行时间,通过比较超声脉冲和回波来测量。
- 目标与超声波传感器之间的距离(l)可用方程(1)[28-31]计算。正如我们所知,超声波速度受环境温度的影响。如果环境温度变化且未知,则会产生不可忽略的测量误差。在此基础上,提出了一种新的超声定位方法,并采用三个超声波传感器进行定位。首先利用三个超声波传感器获得的飞行时间计算飞行时间比值。在此基础上,计算目标(x,y)的坐标,实现定位。这样就不需要超声波速度信息,避免了温度对定位的影响。该方法主要包括两个步骤1.模特。建立了一般传感器配置的广义测量模型(对三个超声波传感器的位置没有特殊的限制)。考虑到计算的复杂性和实际测量,建立了简化/线性传感器配置的简化测量模型。
实验。进行了实际定位实验,验证了所建模型的可行性和有效性。针对一般传感器结构的广义测量模型,对三个超声波传感器的位置(即目标坐标(x,y)和三个超声波传感器的坐标)没有特殊的限制图2。(a)三个超声波传感器的一般传感器配置; (b)一般传感器配置的坐标。假设 s1,s2和 s3的坐标是(- a,0) ,(0,0)和(b,c)。目标与 s1、 s2和 s3之间的距离分别为 l1、 l2和 l3。相应的第11、12、13段飞行时间分别为 plusmn; t1、 plusmn; t2、 plusmn; t3。根据方程(1) ,可以得到下列关系式在这项工作中,飞行时间的比率被用来计算目标的坐标(x,y)。同时,考虑到分母过小会增大计算误差,因此选择合适的分母来计算比值是非常重要的。在这里,选择三个飞行时间的最大值作为分母。假设 t _ 2为三次飞行中的最大值,
则在上述四种情况中,只有第一种情况有唯一的解决方案,其余三种情况都有两种解决方案。在情况(2)、(3)和(4)中,有必要确定哪一组(x,y)是实际坐标。正如我们所知,超声速度在已知的情况下有一个合理的范围。在这项工作中,对于每一组坐标(x,y) ,可以计算出相应的超声速度。如果其中一个超声速度在合理的范围内,对应的(x,y)是目标的实际坐标。通常,对应于另一组(x,y)的超声波速度超出了合理范围,可以排除。需要指出的是,对于情况(2) ,(3)和(4) ,存在对应于两组(x,y)的超声波速度均在合理范围内的特殊条件。理论上,特殊条件可以用系数 ε 来识别。如果 ε 值接近于零(ε →0) ,则两组(x,y)对应的超声速度都在合理范围内。ε 的详细描述如下:其中 r1,r2和 d 可以通过方程(20)得到。在实际定位过程中,对于上述特殊情况,有两种方法确定实际坐标(x,y) ,引入额外的第四个超声波传感器或通过改变三个超声波传感器的坐标(如移动机器人的位置)进行二次定位。后一种方法在这里是首选的,因为它可以通过相同的传感器配置方便地实现。通过这种方法,可以得到两个新的(x,y)集,并且通过在移动平差前后的定位结果中选择(x,y)的公共集可以确定目标的实际坐标。识别过程的详细例子可以在第3.2节找到: 实验结果。简化的测量模型简化的传感器配置(即,三个超声波传感器配置在一条直线上)通常被用来降低复杂性和简化测量,如图3所示。以上三种情况都有两种解决办法。有必要确定哪一组(x,y)是实际坐标。在这项工作中,根据传感器的配置,y 的值必须是正的,这样就可以排除 y 的负值集合。显然,方程(29)、(32)和(35)是目标对应于这三种情况的实际坐标。在简化后的结构中,计算复杂度降低,避免了广义测量模型所需的附加解识别过程。实验结果3.1。实验装置超声波传感器的频率增加,其方向性会更好,但可测距离的范围会减小[11]。考虑到系统的精度和测量距离,选用杭州星宝电子科技有限公司的超声波传感器 dya-100-03h,频率为100kHz其中 l 是目标与传感器之间的测量距离(即 ld、 lc 或 lm) ,lr 是目标与传感器之间的基准距离。3.2.1。通用测量模型实验(1)通用传感器结构定位实验,参数设置为 a = 107.0 mm,b = 83.0 mm,c = -78.0 mm,实验温度为25 °C。传感器2019,19,x 用于同行评审9,15 °C,25 °C,一般传感器配置的实验示意图如图5所示。研究了基于三个超声波传感器的一般传感器结构和简化传感器结构的高精度定位问题。相应地,建立了两个测量模型来实现定位,对于广义测量模型,有四种不同的情况,其中三种情况有两种解。该方法通过检测每组(x,y)对应的超声波速度是否在合理范围内来实现识别过程。通过这种方式,(x,y)的确定可以在大多数情况下实现。然而,对于对应于两组(x,y)的超声速度都在合理范围内的特殊情况,在此通过沿 y 轴移动三个传感器的电流配置后再次测量来确定坐标(x,y)。具体来说,目标的实际坐标可以通过在移动平差前后的定位结果中选择(x,y)的公共集合来确定。这种平差的可行性通过一个特殊条件的例子来验证,如所示的不等式(46)-(51)。对于简化的测量模型,有三种不同的情况。虽然它们都有两种解,但实际坐标可以很容易地确定。在这项工作中,根据传感器的配置,目标(x,y)的坐标必须有一个正的 y 值,这意味着(x,y)的实际集合可以通过排除带有负 y 值的(x,y)的集合来确定。与广义测量模型相比,简化测量模型的辨识过程更为简便。简化测量模型的计算复杂度较低,避免了广义测量模型所需的复杂解识别过程。因此,推荐简化的测量模型用于实际应用
- 结论提出了一种新的基于多超声波传感器的自主移动机器人定位方法。没有额外的温度传感器,三个超声波传感器用于定位。针对一般传感器配置,建立了广义测量模型; 针对简化/线性传感器配置,建立了考虑计算复杂性的简化测量模型。从三个超声波传感器获得三个飞行时间信号。根据飞行时间的比值计算目标的坐标。通过实际超声定位实验,验证了该方法的可行性和有效性。实验结果表明,新的超声定位方法是有效的,两种模型均能成功实现定位,定位精度令人满意。与采用默认超声速度的传统超声定位方法相比,定位精度有了很大提高。与附加温度补偿的超声定位方法相比,该方法定位精度可比,且不需要附加温度传感器。与一般的传感器结构相比,简化的传感器结构更具优势,适合于实际应用新方法不需要额外的温度传感器或校准过程。这种新方法不直接依赖飞行时间测量来计算距离,而是根据飞行时间比率得到目标的坐标。这样就避免了环境温度对定位的影响。为基于多超声波传感器的自主移动机器人的高精度超声波定位提供了一种新的方法。通过实际定位实验验证了该方法的可行性和有效性。本文的研究成果可以为其他人的研究工作提供有益的参考,在自主移动机器人的避碰、制导、导航、地图绘制、目标分类等方面具有广阔的应用前景。然而,由于定位的复杂性,今后需要进行更多的研究工作。研究结构参数对定位误差的影响,实现复杂目标(包括形状复杂的目标和三维目标)的定位,将是我们进一步的研究工作。作者贡献: 概念化,z.h。方法论 Z.h。不好意思。还有 H.J。软件,多发性硬化。还有 YW。验证,多发性硬化症。哦。还有 YJ。; 形式分析,多发性硬化症。哦。还有 YJ。调查,多发性硬化症。哦。还有 YJ。; 资源,z。哦。数据管理,医学硕士。哦。还有 YJ。原稿准备。还有 YW。评论和编辑。H.J.还有 YJ。视觉化,多发性硬化。还有 YW。监督,z.h。; 项目管理,H.J。资金收购 H.J。所有的作者都已经阅读并同意了手稿的出版版本。资金来源: 国家工业控制技术重点实验室(浙江大学) ICT1909项目资助。利益冲突: 作者声明无利益冲突。参考
1. Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2004. 2. Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008. 3. Gualda, D.; Urea, J. Simultaneous calibration and navigation (SCAN) of multiple ultrasonic local positioning systems. Inf. Fusion 2019, 45, 53–65. [CrossRef] 4. Borenstein, J.; Koren, Y. Obstacle avoidance with ultrasonic sensors. IEEE J. Robot. Autom. 1988, 4, 213–218. [CrossRef] Sensors 2020, 20, 17 14 of 15 5. Lee, H.; Kang, D. Design and Fabrication of the High Directional Ultrasonic Ranging Sensor to Enhance the Spatial Resolution. In Proceedings of the IEEE Solid-state Sensors, Actuators amp; Microsystems Conference, Transducers International, Lyon, France, 10–14 June 2007. 6. Ijaz, F. Indoor Positioning: A Review of Indoor Ultrasonic Positioning systems. In Proceedings of the IEEE International Conference on Advanced Communication Technology, PyeongChang, Korea, 27–30 January 2013. 7. Carotenuto, R. A range estimation system using coded ultrasound. Sens. Actuators A Phys. 2016, 238, 104–111. [CrossRef] 8. Gueuning, F.; Varlan, M. Accurate distance measurement by an autonomous ultrasonic system combining time-of-flight and phase-shift methods. IEEE Trans. Instrum. Meas. 1997, 46, 1236–1240. [CrossRef] 9. Marioli, D.; Sardini, E. Ultrasoni
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[591968],资料为PDF文档或Word文档,PDF文档可免费转换为Word

