英语原文共 3 页,剩余内容已隐藏,支付完成后下载完整资料
2015第四届先进信息技术与传感器应用国际会议
两轮自动平衡车的设计与实现
李双全,孔令勇,聂欣欣,李健
哈尔滨理工大学自动化学院,哈尔滨,中国
电子邮件:214835758@qq.com
摘要:作为一种典型的非线性和动态平衡系统,两轮自平衡小车以其体积小、转动灵活、节能减排等优点越来越受到人们的青睐。设计和生产的两轮自平衡车基于卡尔曼滤波和融合角使用STM32控制芯片,idg655 ADXL335加速度计和陀螺仪作为姿态传感系统,PID控制算法调节PWM输出调整电机的转速来改变汽车的运动状态。通过现场测试,该系统工作稳定,实现了载人运行的设计目的。
关键词:自平衡;车辆;STM32;卡尔曼滤波;PID控制
1.引言
载人自平衡车是一种交通工具旨在提高人民生活质量,是一种不稳定的非线性系统,根据倒立摆的原理来实现动态平衡。因其操作灵活在狭窄的范围,节能减排,和简单的驱动的优点,得到了人们的关注。本文采用STM32作为微处理器设计的本体设计的平衡车系统,车体检测状态改变与姿态传感器,编码器和舵机增益状态信息的用户需求,驱动电机使用PID算法实现汽车的控制和平衡,当车身向前或向后时,汽车会感觉到和沿用户重心移动的方向移动,实现加速,减速,转向和后退功能。
- 载人平衡汽车系统硬件设计
良好的机械结构决定了用户的驾驶舒适性,本文主要设计了汽车的平衡由车体,电机和铅蓄电池组成。在载人车的机械结构中,车身主要是由,方向盘,转向轴和一系列机械部件组成。刷电机是一个具有刷电装置的旋转电机,其将电能转换成机械能或机械能转换为电能[1],马达的旋转立即具有快速起动和制动的特点。在设计中电机带刷马达,安装在汽车踏板的下侧,直流电机额定工作电压为36V,直流电机带编码器,可以起到测量速度的作用。 身体还配备了四个12V铅电池为汽车提供动力。
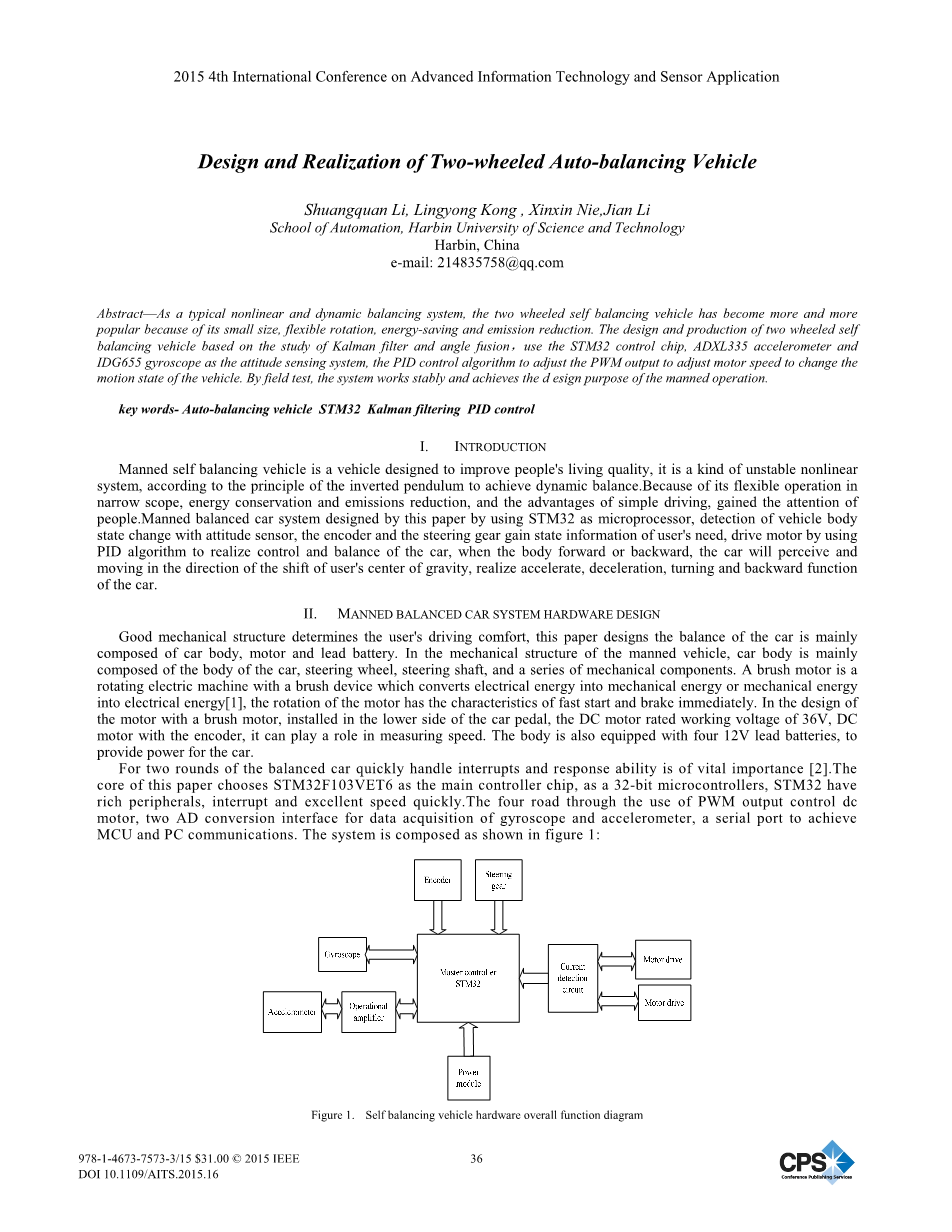
对于两轮平衡车,快速处理中断和响应能力至关重要[2]。本文的核心是选择STM32F103VET6作为主控芯片,作为32位微控制器,STM32具有丰富的外设,中断和优异的速度 四路通过使用PWM输出控制直流电机,两路AD转换接口用于数据采集陀螺仪和加速度计,一个串口实现MCU和PC通讯。系统组成如图1所示:
图1.自动平衡车辆硬件总体功能图
- 主硬件电路设计
在本文中,开关模块内部集成稳压芯片LM2596,LM7805和AMS1117用于提供供能模块。LM2596的最大输出电流为3A,具有良好的线性度和负载调节能力。AMS1117作为三级降压电压芯片,是一款低压降电压调节器,内部集成散热保护和限流保护电路。本文使用的LM2596将36V直流电源电压转换为12V,用于H桥电机驱动电路,12V然后通过LM7805输出5V至电流检测和编码器使用,最终5V后AMS1117-3.3V降压至3.3V进行控制芯片,NRF无线模块等周边电源。
汽车电机驱动电路的性能起着非常重要的作用。为了避免电机的工作特性受功率的影响,通过设计,速度范围宽,具有高电流驱动能力,高可靠性和高电机驱动电路的速度开关是本文的主要内容。
本设计采用含有H桥电机驱动电路,选用驱动芯片IR2184来驱动,驱动电流峰值可达3A,并具有连续输出电流。PWM信号由驱动芯片的逻辑控制控制,四个开关的开关由开关控制,实现开关端,电机的速度由PWM波的占空比决定。该设计电机工作在25Khz频率左右,每秒可实现约100次控制反馈,保证车辆的实时性能。
4.软件设计
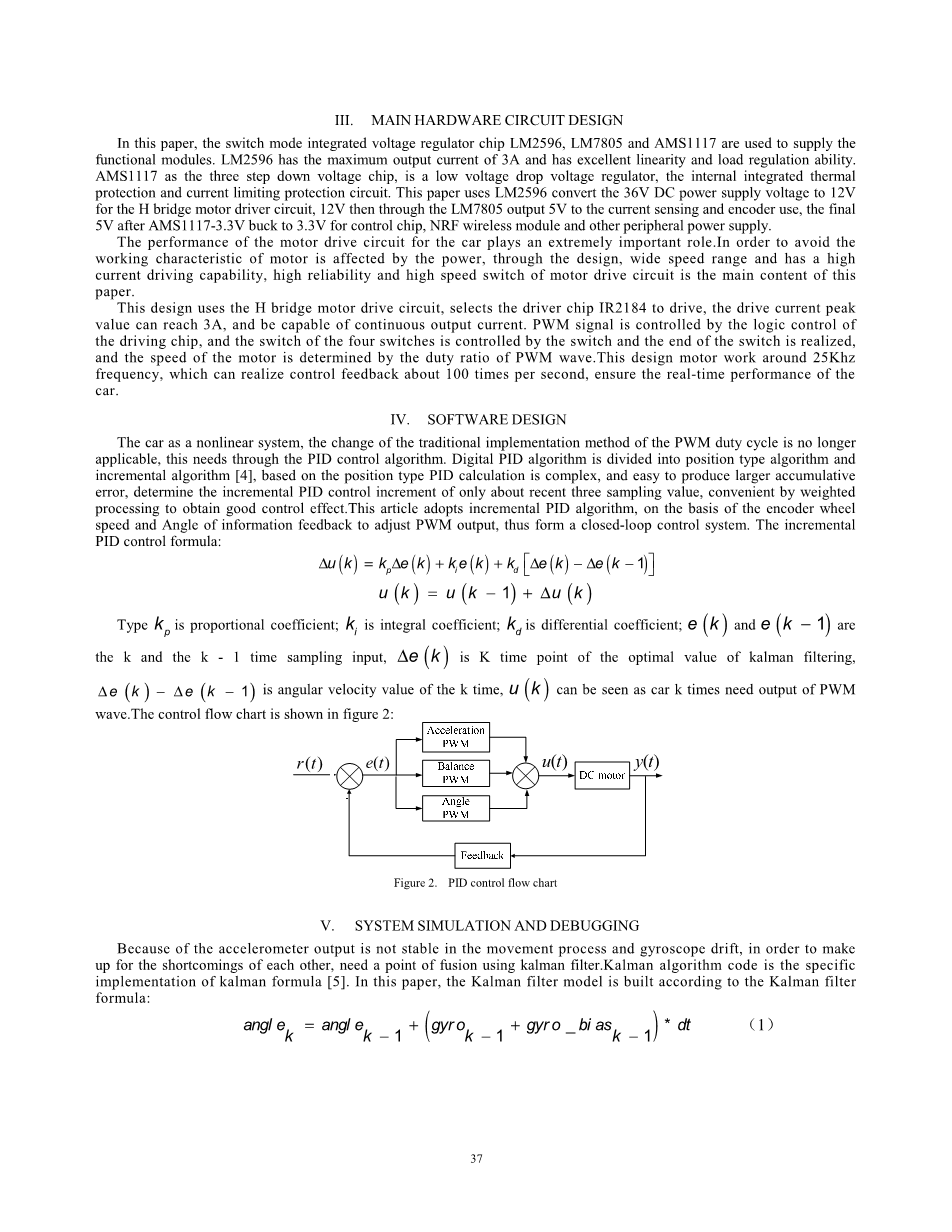
汽车作为一种非线性系统,PWM占空比的传统实现方法的变化不再适用,这需要通过PID控制算法。数字PID算法分为位置类型算法和增量算法[4],基于位置类型PID计算复杂,容易产生较大的累积误差,确定增量PID控制增量只有近三个采样值,方便 加权处理获得良好的控制效果。本文采用增量PID算法,在编码器轮速度和角度信息反馈的基础上调整PWM输出,从而形成闭环控制系统。 增量PID控制公式:
其中,是比例系数,是积分系数,是微分系数。和是k和k-1时刻的采样输入。是卡尔曼滤波最优值的K时间点。是k时间的角速度值。可以看作是汽车k次需要PWM的输出波。控制流程图如图2所示:
图2. PID控制流程图
5.系统仿真与调试
由于加速度计输出在运动过程和陀螺仪漂移中不稳定,为了弥补彼此的缺点,需要使用卡尔曼滤波器的融合点。卡尔曼算法代码是卡尔曼公式的具体实现[5]。在本文中,卡尔曼滤波器模型是根据卡尔曼滤波器公式构建的:
(1)
其中,是k时刻角度的估计。是k-1时刻测量的加速度。是k-1时刻陀螺仪力矩测量值。是陀螺漂移值的温度。直流取样时间。
陀螺仪在k时间内的温度漂移等于k-1时间,即:
(2)
通过公式(1)和(2)可以得到离散表达式的状态空间方程:
对于测量噪声协方差R和过程噪声协方差矩阵Q,形式如下所示类型:
车身角度和车身角速度的过程噪声的协方差分别为Q_gyro和Q_angle,Q_angle和Q_gyro值主要基于经验和测试,取不同的值表示不同的信任度,值越小,信号度越大。代表观测噪声协方差矩阵R,反应是加速度计噪声的判断,加入R的大值,则系统噪声很大。
基于卡尔曼滤波器实现陀螺仪角度和加速度计采集值优化,设置采样频率为200Hz,周期为20 ms,dt值为0.005,取R=(0,5),,采样值更接近实际值。 卡尔曼滤波器仿真图如图3所示:
图3.卡尔曼滤波模拟
6.结论
在本文中,设计了使用姿态传感器进行双轮系统状态采集的方法,并对卡尔曼滤波算法和PID控制算法进行了研究。 实现测试的整体功能以及基本的交通工具。 作为高性价比的载人车,自我平衡车有很多值得深入的研究,待进一步研究。
参考文献
[1] Zhihai Feng, Manfeng Dou, Chunyue Shi. Study on Brush Wear of Brush Motor under Vacuum Condition [J]. Micro Motor ,2004 (08)
[2] Xiaoming Wang. Microcontroller Control of Motor. Second Edition. Beijing University of Aeronautics and Astronautics Press,2007:224-249
[3] Jingxin Dong. Micro-mechanical Accelerometer [M], Beijing: Mechanical Industry Press, 2009
[4] Hongyue Zhang ,Qing Wang. Optimal Control Theory and Application [M]. Beijing: Higher Education Press, 2006,83-101.
[5] Liang Qiao. Reasearch of Passive Tracking Arithmetic Based on Spatial Information Mearurement. Journal of Harbin University of Science and Technology,2012(04)
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[26497],资料为PDF文档或Word文档,PDF文档可免费转换为Word

