英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
毕业设计(设计)
英文文献翻译
Title:A Low-Cost Mobile Sensing System for Urban Air Quality Monitoring
城市空气质量监测的低成本移动传感系统
Yi Gao1,2, Wei Dong1lowast;, Kai Guo1, Xue Liu2, Yuan Chen1 Xiaojin Liu1, Jiajun Bu1, Chun Chen
1College of Computer Science, Zhejiang University, China.
2School of Computer Science, McGill University, Canada.
摘要:空气质量监测引起了政府,学术界和工业界的广泛关注,尤其是PM2.5,因为它对我们的呼吸系统产生了重大影响。在本文中,我们介绍了基于移动传感的低成本城市PM2.5监测系统Mosaic的设计,实施和评估。在马赛克,城市公交车上部署了少量空气质量监测节点,以测量空气质量。然而,基于光散射的当前低成本粒子传感器易受移动车辆上的空气流动干扰。为了解决这个问题,我们建立了我们的空气质量监测节点,马赛克节点,采用了一种新颖的建设性空气流干扰设计,基于精心调校的空气流动结构和GPS辅助过滤方法。此外,用于系统部署的总线通过新算法选择,该算法实现高覆盖和低计算开销。收集的传感器数据还用于计算位置的PM2.5,而无需现有推理模型的直接测量。我们在一个测试中使用Mosaic系统,其中包括超过70个兴趣点。结果表明,马赛克系统能够准确地获得覆盖率高,成本低的城市空气质量。
1.引言
据世界卫生组织(WHO)报告,2012年约有700万人过早死亡与空气污染有关,大多数病例属于低收入和中等收入国家[1]。 由于对我们的呼吸系统[2]甚至血液系统[3]的显著影响,PM2.5(直径为2.5微米或更小的颗粒物质)最近引起了很多关注,特别是在具有严重空气的发展中国家污染。据大学咨询公司称,2013年中国空气净化器总销售额达到35亿元人民币(5.59亿美元),与2012年相比增长80-100%[4]。
因此,许多国家开始监测空气质量并公布数据,以支持有效的空气污染控制以及提高公民的意识。 空气质量监测有不同的方法,例如遥感[5]和静态空气质量测量站,然而,这种方法通常需要大量的资金和人力资源。 例如,典型的空气质量测量站需要大约200,000美元用于建设,每年30,000美元用于维护[6]。
除了上述两种由政府主导的方法外,还有一些投资规模较小的项目。 AirCloud [7]是一种新颖的客户云系统,用于存储和人员的质量监控。 收集的数据用于通过基于云的后端中的分析引擎推断整个空气质量图。 然而,与使用高端测量站类似,使用低成本固定传感器(或人工传感器)也存在缺乏覆盖和可扩展性问题。为了实现高覆盖率和准确性,将在AirCloud项目中部署更多传感器(已建立1000个AirCloud传感器来监控城市[7]),显着增加了总成本。 因此,需要新的设计来实现更高的覆盖范围,同时保持低成本特征不受影响。
在本文中,我们介绍了Mosaic,一种用于城市空气质量监测的低成本移动传感系统。为了实现低成本的空气质量监测,基本思路是将空气质量传感器部署到移动城市公交车上以增加系统覆盖范围。然而,据我们所知,目前基于光散射的低成本PM2.5传感器由于严重的气流扰动而无法直接用于移动车辆(详见第IV部分)。为了解决这个问题,我们首先开发了一种低成本的空气质量传感节点Mosaic-Nodes,它们能够在移动的车辆上实现良好的精度。然后我们将MosaicNodes附加到精心选择的总线上,以获得每个节点更大的覆盖范围。通过这种移动传感设计,可以覆盖只有少量传感节点的大城市区域,从而显着降低总成本。最后,根据测量的空气质量数据和现有的推理模型[7],我们能够获得监测区域的高分辨率空气质量图。
图1显示了我们开发的Mosaic-Node,它带有用于实验室仿真的外部风传感器和用于验证的Dylos [10]粒子传感器。Mosaic-Node中有多个传感器,包括GPS,PM2.5传感器,噪声传感器和湿度和温度传感器。为了降低成本,我们选择了基于灯光散射方法的PM2.5传感器。 然而,当基于光散射的传感器节点与总线一起移动时,相对空气流将引入显着的测量误差。 我们提出了一种新颖的建设性空气流动扰动方法来解决这个问题。通过使用这种方法,快速相对空气流可用于携带颗粒并减少不稳定的测量,而不是引入误差。节点内的空气流动结构经过实验室和现场实验的精心设计和调整。
图1.带有用于实验室仿真的外部风传感器的Mosaic-Node和用于验证的Dylos粒子传感器。
Mosaic系统使用面向POI(面向兴趣点)的总线选择算法来选择总线以部署Mosaic-Nodes。 POI是某人可能发现有用或有趣的位置,例如学校或医院。 直观地说,我们希望在POI附近部署Mosaic-Nodes以提高测量精度。 基于这种直觉,我们为监控区域中的每个位置定义了面向POI的覆盖范围,并设计了一种有效的算法来选择最大化总覆盖范围的总线。 我们将所提出的算法应用于包括1415条总线和282条不同路线的数据集。 与随机游走算法和进化算法相比,该算法能够有效地选择总覆盖范围大得多的总线。 我们总结了本文的贡献如下。
- 我们设计,实施和评估低成本的空气质量传感节点Mosaic-Node,并采用精心调校的空气流动结构。
- 我们提出了一种新颖的建设性空气流干扰方法,利用相对气流来提高测量精度,使用GPS数据滤除一些不稳定的原始数据。据我们所知,Mosaic-Node是第一个低成本的PM2.5监控节点,专为移动车辆而设计,这对于以低成本实现高覆盖率至关重要。
- 我们提出了一种有效的面向POI的总线选择算法来选择用于传感器部署的总线。 与随机算法和现有方法相比,该算法实现了更高的总覆盖率和更低的计算开销。
- 我们实施Mosaic系统并将MosaicNodes部署到城市公交车上,用于城市空气质量测量。结果表明,Mosaic系统能够以更低的成本监测城市空气质量,并且具有良好的精度。
本文的其余部分结构如下。 第二节介绍了有关空气质量监测的相关工作。 第三节介绍了我们的方法概述。 第四节详细给出了建设性的空气流动扰动。 第V节介绍了面向POI的总线选择算法。 第六部分显示了评估结果,最后,第七部分总结了本文并给出了未来工作的方向。
2. 相关工作
2.1空气质量监测
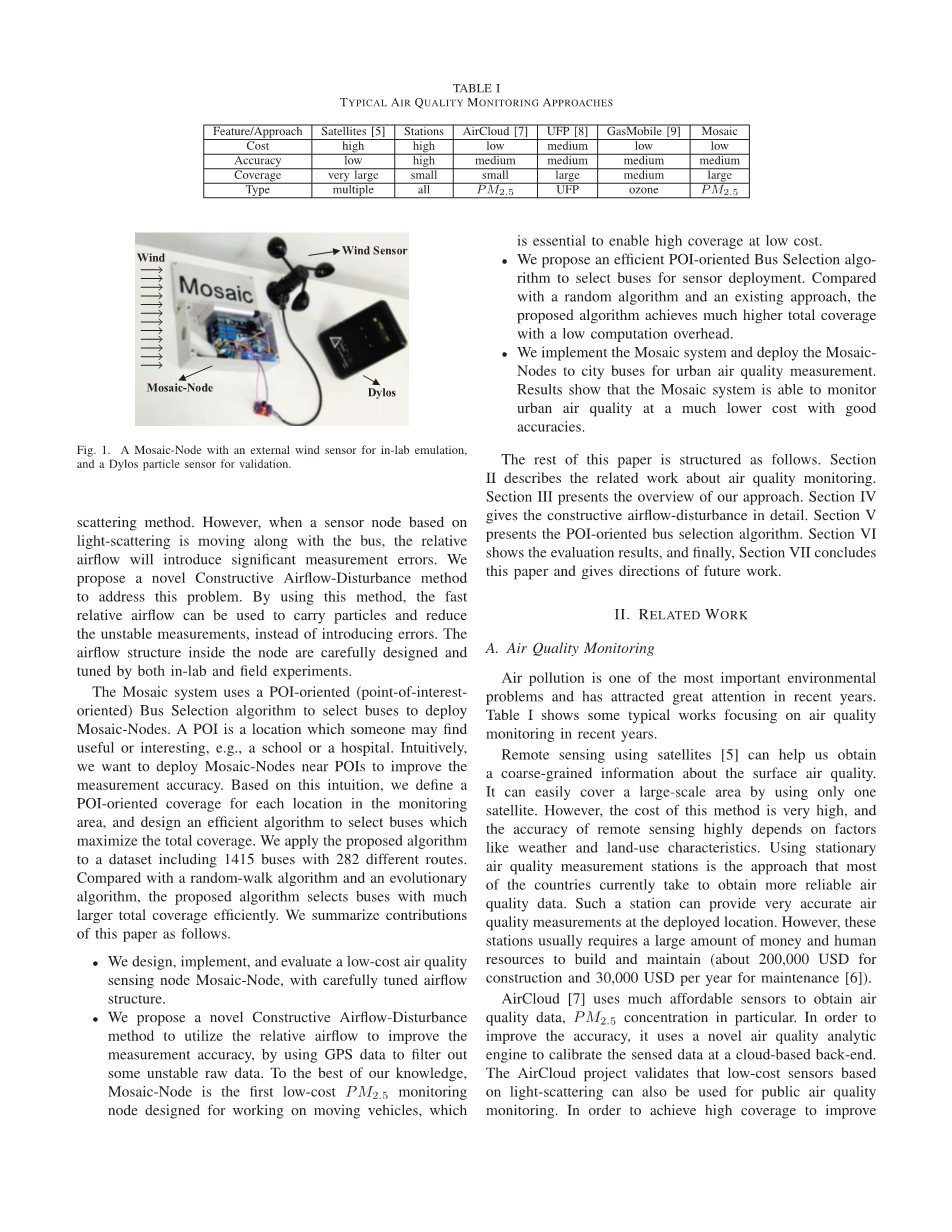
空气污染是最重要的环境问题之一,近年来备受关注。 表一显示了近年来关注空气质量监测的一些典型工作。
表1:典型的空气质量监测方法
使用卫星进行遥感[5]可以帮助我们获得有关地面空气质量的粗粒度信息。仅使用一颗卫星就可以轻松覆盖大面积区域。然而,这种方法的成本非常高,遥感的准确性很大程度上取决于天气和土地利用特征等因素。使用固定式空气质量测量站是大多数国家目前采取的获取更可靠的空气质量数据的方法。这样的站可以在部署位置提供非常准确的空气质量测量。 然而,这些站点通常需要大量的资金和人力资源来建设和维护(建设约20万美元,维护每年30,000美元[6])。
AirCloud[7]使用价格合理的传感器来获取空气质量数据,特别PM2.5浓度。为了提高准确性,它使用新颖的空气质量分析引擎在基于云的后端校准感测数据。 AirCloud项目验证了基于光散射的低成本传感器也可用于公共空气质量监测。为了实现高覆盖率的提高准确性,应部署大量固定传感节点,增加总成本。
除PM2.5外,还有一些工作重点是其他大气成分,如超细颗粒[8](UFP)和臭氧[9]。 为了监测超细颗粒,提出了一种移动传感方法[8]。 测量超细颗粒比测量诸如PM2.5的较大颗粒(例如,每传感器lt;100美元)更昂贵(例如,每传感器10k美元)。 由于它使用移动传感来监测空气质量,因此其覆盖范围远大于固定站方法。 还有参与式传感方法[9],[11]用于通过移动电话测量气体。 GasMobile [9]是一种典型的基于手机测量臭氧的方法。 由于监测PM2.5等空气污染物并不像气体那样容易携带,因此基于手机监测PM2.5仍然具有挑战性。
在这项工作中,我们使用基于灯光散射方法的定制传感器,以实现低成本目标并解决移动车辆上的相对气流扰动问题。 此外,通过在精心挑选的公交车上部署Mosaic-Node,我们的Mosaic系统的覆盖范围得到了显着改善。
2.2.空气质量推断
除了直接监测空气质量外,还有基于建模和推理的方法。经典的扩散模型[12]推断出某个地点的空气质量,而没有直接测量作为交通量,排放因子,气象等的函数.LUR(土地利用回归)[8],[13]使用土地利用和交通污染浓度模型的特征。将卫星数据与气象特征和土地利用信息相结合,Liu等。 [14]计算每日PM2.5地图,空间分辨率为4km。对于超细颗粒,Clifford等。 [15]利用土地利用信息和气象特征开发模型。当有更多的直接空气质量测量时,这些空气质量推断模型可能更准确。由于我们主要关注如何在本文中以低成本获得更准确的直接测量,我们使用现有的推理模型[7]来计算没有任何直接测量的位置处的空气质量。使用具有不同数据源的不同模型在准确性或效率方面可能是有益的,这被视为未来的工作。
3. Mosaic概述
3.1感应节点
我们在Mosaic系统中使用两种传感节点,Dylos和Mosaic-Nodes。 Dylos [10]是一款便携式空气质量传感器,价格约为400美元。 它能够通过测量仪精确测量PM2.5浓缩物。在马赛克系统中,几个Dylos监测器用于提供精确的空气质量测量,以校准低成本的MosaicNodes。 请注意,由于以下原因,Dylos节点无法替换Mosaic系统中的Mosaic-Nodes。首先,Dylos节点的能耗要高得多,使其依赖外部电源进行长期传感。 其次,更重要的是,Dylos节点不适合在室外工作,不同的天气,例如下雨。
Mosaic-Node包括多个传感器:GPS,定制的PM2.5传感器,噪声传感器以及湿度和温度传感器。 在本文中,我们仅使用PM2.5数据,GPS数据以及湿度和温度数据。 Mosaic-Node中使用的GPS是NEO-6 GPS [16]。 定制的PM2.5传感器是修改后的SHINYEI PPD42NS [17]传感器。 我们修改了传感器以提高其在移动车辆上的准确性。 详情见第IV节。 Mosaic-Node还包括其他组件,例如计算/存储/通信组件,便携式电源组,塑料封装和基于PVC管的空气流结构。 总体而言,Mosaic-Node的小批量生产成本为90美元。 预计每个节点的成本可以进一步降低,以制造大规模部署的大量节点。
3.2设计概述
当基于光散射的空气质量传感器与公共汽车一起移动时,相对空气流将引入显着的误差。 通过使用建设性空气流干扰方法(包括定制的空气流动结构和GPS辅助过滤方法),我们能够显着提高移动车辆上马赛克节点的测量精度(详见第IV部分)。 为了选择总线以更好地覆盖目标区域,我们使用面向weuseaPOI(POI:pointofinterest)的总线选择方法来选择部署Mosaic-Nodes的多条总线(详见第五节)。 POI是一个特定的位置,有人可能会发现有用或有趣。 基于Mosaic系统的两个关键组件 - 建设性空气流动 - 干扰和面向POI的总线选择,八个马赛克节点被部署到中国杭州的八个总线。 然后我们使用现有的推理模型来计算没有直接测量的位置的空气质量,并获得具有高分辨率的PM2.5地图。
4. 建设性气流扰动
4.1光散射粒子传感器
我们首先简要介绍一下低成本空气质量传感器使用的光散射方法。基本思想是使用光传感器来计算每单位体积的颗粒数量。 图2显示了它的工作原理。来自LED的光束用透镜聚焦到感测点(或观察体积)。 然后通过传感点的粒子散射光。光传感器通过透镜接收散射光并产生脉冲信号。最后,可以在转化后获得颗粒浓度。
图2.用于检测颗粒浓度的光散射方法
直观地,当在感测点处存在
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[20574],资料为PDF文档或Word文档,PDF文档可免费转换为Word

