
英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊逻辑的图像边缘检测算法
摘要
本文报告了在MATLAB环境中实现一种非常简单但高效的基于模糊逻辑的算法,通过使用2times;2像素窗口扫描输入图像的边缘来检测输入图像的边缘。此外,MATLAB中的图形用户界面(GUI)已设计用于帮助加载图像,并在不同的中间级别的处理中显示合成的图像。可以从GUI的滑块控件设置图像的阈值级别。设计的模糊推理系统具有四个输入,其对应于瞬时扫描矩阵的四个像素,一个输出告诉所考虑的像素是“黑色”,“白色”还是“边缘”像素。规则基础包括对目标像素进行分类的十六条规则。噪声去除的算法已经在不同的处理级别实现。对来自FIS的合成图像进行第一和第二导数,以跟踪图像的边缘并进一步细化。将实现的算法的结果与“Canny”,“Sobel”,“Prewit”和“Roberts”等标准边缘检测算法进行了比较。该算法的主要特征是它已经通过尽可能小的掩模进行设计,即2 * 2不同于文献中发现的3 * 3或更大的掩模。
类别和主题描述:
图像处理和计算机视觉,电子视觉,人工智能,MATLAB
一般条款:算法,设计,实验
关键词:模糊逻辑,边缘检测,数字图像处理,特征提取,噪声去除,电子视觉,计算机视觉
- 介绍
现代时代是一个技术时代,我们现在相信基于视觉的情报。计算机渗透到市场和生活的每一个领域都迫使设计师增加了对电子视觉或图像处理领域的越来越多的认识和分析和创新的能力。在电子视觉的计算智能层面,已经开发了许多算法来从图像中提取不同类型的特征,例如边缘,段和许多其他类型的图像特征。边缘检测是电子视觉中的术语,特别是在特征提取领域中的术语以参考,旨在识别图像亮度急剧变化或更多的数字图像中的点的算法正式有不连续性。边缘检测的目标是定位图像中与图像中看到的对象边缘相对应的像素。通常通过与阈值进行比较的第一和/或第二导数测量来完成,其将像素标记为属于边缘或不属于边缘。结果是仅包含检测到的边缘像素的二进制图像。检测图像亮度的急剧变化的目的是捕捉世界的重要事件和属性变化。图像亮度的不连续性可能对应于深度的不连续性,表面取向的不连续性,材料特性的变化或场景照明的变化。 Shashank Mathur和Anil Ahlawat提出了一种用于边缘检测的模糊相对像素值算法,通过使用窗口化技术检查3times;3像素掩模中的相对像素值来扫描图像,该窗口技术经受一组模糊条件用于比较具有相邻像素的像素值以检查窗口中的像素幅度梯度。然而,他们的技术不是基于规则的[1],中国工程院院士李丽华,刘冰琪,周滨等人将模糊技术作为模糊技术的重要组成部分,将模糊技术作为许多领域的新兴技术,特别是图像领域和模糊增强技术。基于该技术,首先设置了原始图像的图像模糊特征平面,然后在模糊增强之前进行,然后通过Sobel差分算法检测边缘[2]。土耳其伊兹米特计算机工程系Kocaeli大学的Yasar Becerikli1和Tayfun提出,边缘检测是图像处理中最重要的任务之一。他们研究了图像分割;注册和识别基于边缘检测。他们提出,基于模糊规则的算法在处理最终图像边缘厚度方面更加灵活[3]。 Cristiano Jacques Miosso,Adolfo Bauchspiess介绍说,一阶线性滤波器构成了最广泛应用于数字图像中边缘检测的算法,但是由于不均匀性,对比度变化很大的图像不能获得良好的结果照明,因为它在大部分自然图像的采集过程中发生[4]。韩国KAIST电子工程与计算机科学系李恩洙,王恩雄李恩荣介绍了使用3 x3个理想二进制像素图案的边缘幅度和方向方案,并描述了一个查找表。他们得出结论,他们的算法不需要任何手动在线阈值调整,更适合于动态环境[5]。
本文的工作涉及基于模糊逻辑规则的图像边缘检测算法的开发。 所使用的扫描掩模是最小的,即2times;2像素窗口。 已经开发了基于MATLAB环境的模糊推理系统,能够检测图像的边缘。 16个规则的规则基础被设计为将所考虑的像素标记为黑色,白色或边缘。 噪声去除算法已经在中间和最终的处理水平上实现。 结果与标准算法进行了比较。
图1.基本框图
2.FUZZY LOGIC控制器
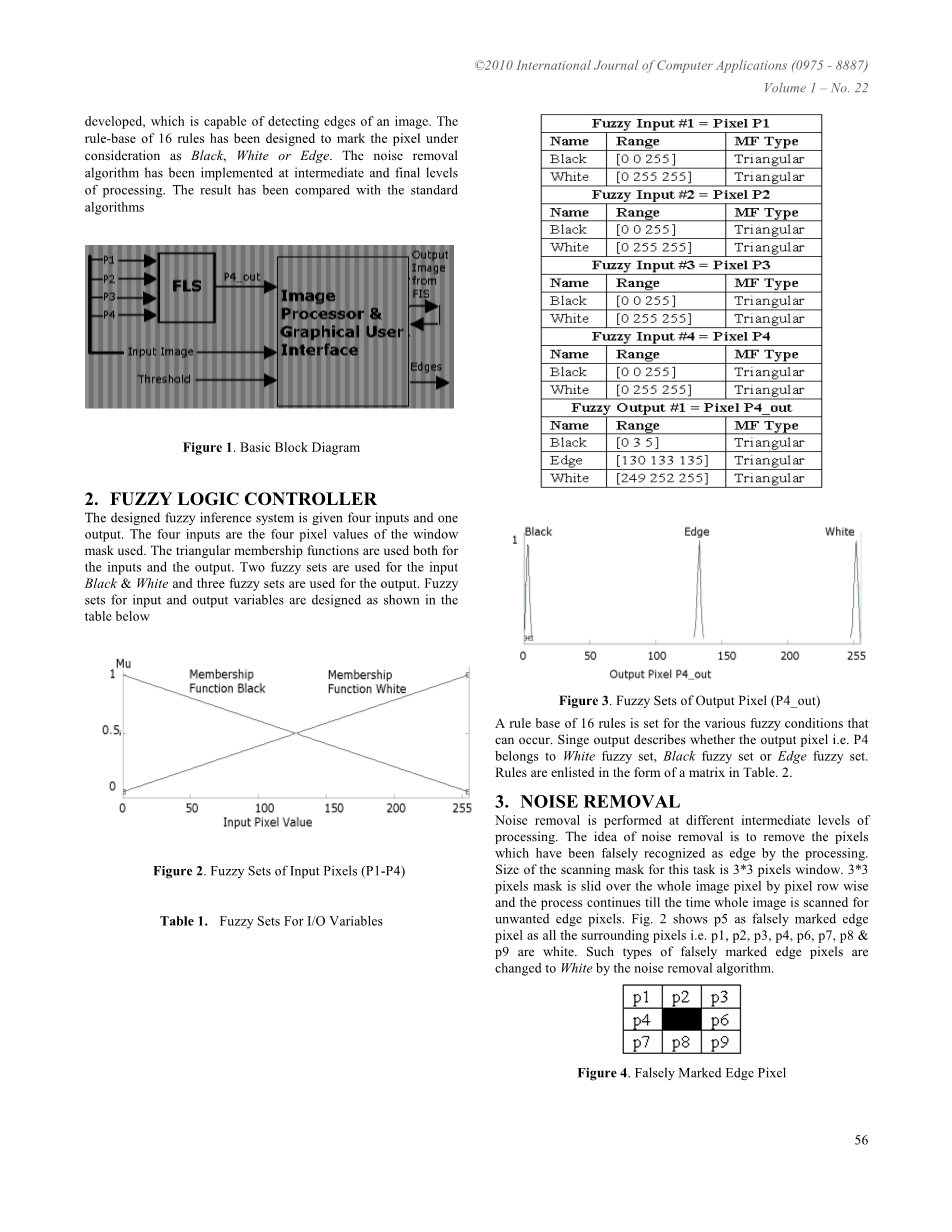
设计的模糊推理系统给出了四个输入和一个输出。 四个输入是所使用的窗口掩码的四个像素值。 三角隶属函数用于输入和输出。 两个模糊集用于输入黑白,三个模糊集用于输出。 输入和输出变量的模糊集如下表所示:
图2.输入像素模糊集(P1-P4)
表1. I / O变量的模糊集
图3. 输出像素模糊集(P4_out)
对于可能发生的各种模糊条件设置16个规则的规则库。 Singe输出描述输出像素即P4是否属于白色模糊集,黑色模糊集合或边缘模糊集合。 规则以表格中的矩阵形式登记为table2.
3.噪声消除
在不同的中间处理级别进行噪声去除。 噪声去除的想法是去除被处理错误地识别为边缘的像素。 此任务的扫描掩码的大小为3 * 3像素窗口。 3 * 3像素的掩模逐行移动整个图像,并且该过程一直持续到整个图像扫描不需要的边缘像素。 图。 图2示出了作为错误标记边缘像素的p5,因为所有周围像素,即p1,p2,p3,p4,p6,p7,p8和p9是白色的。 这种类型的错误标记的边缘像素被噪声去除算法改变为白色。
图4.虚假标记边缘像素
表2.模糊规则矩阵
4.算法方法
该算法基于一组四个像素(一个图像的2x2窗口的一部分)到一组模糊条件的映射,这些模糊条件有助于突出显示与图像相关联的所有边缘。。 模糊条件有助于测试在边缘存在的情况下可能存在的像素的相对值。 因此,相对像素值有助于提取与图像相关联的所有边。 如果相邻像素之间的强度变化较大,则图像被称为具有边缘。 这个任务是在十六条规则的帮助下完成的。 然后设计图形用户界面,以便将结果与现有技术进行比较。用于扫描图像的掩模如下所示,当P1,P2,P3为白色并且P4为黑色时显示示例,然后输出为黑色。
图5. 2 .用于扫描的掩模
掩模在输入图像的一个区域上滑动,改变P4像素的值,然后向右移动一个像素,并向右移动,直到到达行的末尾。 然后从下一行的开始开始,并继续进行整个图像的扫描。 当使该掩模滑过图像时,基于像素P1,P2,P3和P4的规则和值,由模糊推理系统产生输出。
a)P1,P2,P3和P4的酥脆输入被模糊化成各种FS,具有常规的脆性隶属函数即黑白。
b)使用模糊T规范运算符(MIN或PRODUCT)在MF上计算燃烧强度。
c)对每一个清脆的输入都会触发模糊规则。
d)通过使用MAX运算符(s-norm)来实现所有点火规则的合成输出FS。
e)使用Centroid方法进行去模糊化。
f)酥脆输出P4_out是输出图像的像素值,即包含边缘,黑色和白色区域的像素值。
g)在应用噪声去除算法后,对FIS的图像输出进行一阶导数。
h)进一步细化通过二阶导数和噪声去除来执行。
5.模拟结果
为此应用设计的GUI如图所示。任何标准边缘检测算法(Sobel,Canny,Prewit&Roberts)可以从GUI中的列表框中选择进行比较。阈值级别设置通过GUI的滑块控件完成。更多的滑块的值,更多的边缘将被跟踪,但噪音也将增加。对图像边缘检测开发的模糊算法进行了各种图像的测试,并将输出与现有的边缘检测算法相比较,并且观察到该算法的输出提供了更多明显的标记边缘,因此具有比标准存在更好的视觉外观。如图5(a-c)所示的样本输出比较了“Sobel”边缘检测算法和我们的模糊边缘检测算法。可以看出,与通过“Sobel”边缘检测算法发现的输出相比,由模糊方法生成的输出已经发现图像的边缘更明显。因此,基于模糊规则的算法提供了更好的边缘检测,并且具有一组穷尽的模糊条件,这有助于以非常高的效率提取边缘。
图6.模糊算法与Sobel相比的结果
6.结论
在本文中,重点是开发一种非常简单而又非常高效的基于模糊规则的边缘检测算法来简化人工智能和数字图像处理的概念。该算法和相关的GUI已经在MATLAB环境中开发了。与已经开发的各种其他边缘检测算法进行比较。显示的结果显示了边缘的准确性,在其他算法上使用基于模糊规则的算法进行检测。基于模糊规则的算法已经成功地获得了在使用各种图像进行实现和执行之后存在于图像中的边缘。已经显示了样本输出,使读者了解算法的准确性。这样开发的算法在数字图像处理的各个领域展现出巨大的应用范围。
7.未来的范围
a)通过融合其他智能技术如GA,ANN,PSO和/或ACO等来优化FLS。
b)使用2型FS设计,期望响应更好。
c)目前,边缘厚度是理想的。可以通过优化各种模糊参数来改善它。
d)此外,掩模的尺寸可以从2x2增加到3x3或4x4,因此可以设置更多的规则,并且可以将结果与w.r.t.进行比较。面膜大小。
e)在我们的技术中,图像首先被转换为灰色图像。可以消除这种限制,并且可以将算法直接应用于彩色图像,然后检测将变得显着更复杂。
参考文献
[1] Shashank Mathur,Anil Ahlawat,“应用模糊逻辑在图像检测中”,国际会议“智能信息与工程系统”
INFOS 2008,瓦尔纳,保加利亚,2008年6月至7月
[2]李英华,刘冰奇,周滨,“影像边缘检测在模糊技术中的应用”,电子影像与多媒体技术会议2004年11月
[3] Yasar Becerikli1和Tayfun M. Karan,“A New Fuzzy,边缘检测方法,计算情报和生物启发系统“,2005年6月
使用数字图像处理和K最近邻方法自动识别单因子
背景:寄生生物具有分类均匀的形态,因此,可以使用模式识别技术来识别它们[1]。 在这项研究中使用单因子物种,因为它们是值得研究的分类群[2]。 世界上可能有大约25000个单因素,目前只有4000个是已知的[3]。 单因素在形态上是非常多样化的,它们是唯一具有先进适应性辐射的扁丝虫进化枝[2],附件机构的结构设计变化[4],通常用于物种鉴定。 特别是,猛禽附着器官的特征在于核型结构如锚杆,杆,钩等。这些一般的形态通常是单因子的特征[5],被用作分类学的诊断特征[6,7]。
将样本图像自动分类到其相应的物种需要开发能够表征物种形态的模型和方法,并将这些知识应用于其识别。自动系统应与图像或文本信息的数据库相结合[8]。 Primo Coltelli等人[9]认为图像采集是设计自动化系统中最重要的一步,捕获图像应该以较少的复杂性为重点。采集条件应该明确定义,并保持相同的所有图像,后来标记由专家分类学家。
自动化系统可以使用图像处理,特征提取和分类来识别特定物种,属,家族或秩序级别的标本。物种的数字图像,特别是微观图像,通常会出现灰尘或其他噪声伪影。噪声使相邻像素值聚类[10],所以应该通过图像处理来减少,特别是滤波的平滑方法。了解要过滤的噪声的普遍类型很重要,以便更有效地去除噪声。除此之外,系统中的图像处理的目的通常是将数字图像转换为标准姿态[11],并使用分割在统一的背景上实现可识别的对象。为了便于分割步骤,应该去除图像伪影,并且必须改善对比度以及动态范围。目标是识别和分类数字图像中感兴趣的对象。还有,特征提取和选择技术的性能取决于系统分类器的类型和数据的质量[12]。为了实现高性能分类,不需要检测所有功能。如果使用分类器足够强大,即使某些特征未被检测到,该方法也可能产生成功的结果[13]。在KNN分类中,对象根据其邻居的多数投票进行分类,对象被分配给在其k个最近邻居中最常见的类。在这种分类方法中,根据其特征彼此靠近的对象可能属于相同的模式类[14]。邻居取自一组已知正确分类的训练样本。例如在鱼类外寄生物中鉴定Gyroactylus属物种[15],实现了由活动形状模型(ASM)提取的特征,创建了线性判别分析(LDA)和K-最近邻(KNN)两个线性分类器,和两个非线性分类器,多层感知器(MLP)和支持向量机(SVM)。 KNN产生最理想的结果,分类精度为98.75%。已经开发了许多半自动化系统来识别不同级别的生物图像。在1996年,开发了基于神经网络的鞭毛藻分类(DiCANN)系统[16]。随后,Moyo等人研究了根据其在显微镜下的单一毛发图案的哺乳动物的法医鉴定。 [17]。元等[18]讨论了从他们的轨道图像到物种水平的鉴定。后来,半自动化系统的改进导致了全自动化系统。成功的现有自动化系统的实例是自动叶片鉴定系统(ALIS)[19],数字自动识别系统(DAISY
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141209],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

