英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
毕业论文(设计)
外文翻译
题 目 毫米波测云雷达的应用研究
毫米波测云雷达的应用研究
范辉,黄星宇,苏涛,高忠辉
安徽省四创电子有限公司 , 中国 合肥 , 230088
摘要: 近年来,毫米波雷达在雷达遥感领域扮演着一个重要的角色。在本文中,首先介绍了该技术的应用;然后,对非降水和弱降水云系的毫米波测云雷达的观测与X波段天气雷达进行比较。比较结果表明,在宏观和微观的云研究中,毫米波测云雷达是一个更好的观测方式。然而,这种技术经历了严重的雨衰,这也是本文介绍的。
关键词:毫米波;测云雷达;天气雷达
1引言
天空中超过50%的部分被云层覆盖,云的形成和变化对天气和气候有重要的影响。云也控制着地球表面的温度,并且影响着地球系统的进化。
对于云的研究的任务是复杂且繁重的。通常,对云的观测注重于云的宏观物理量,如云量、形状、高度和速度,和微观物理量,如物理、化学、光学性能和辐射等。与此同时,对云以及辐射特性的观测的关注越来越少。通常,测云雷达的工作频率是在毫米波段。由于云粒子可以散射电磁波,通过分析雷达回波信号可以得到不同性质的云,同时其宏观和微观结构可以通过回波参数来描述[1]。
2四创电子有限公司研制的毫米波雷达
在1950年,毫米波雷达第一次用于云以及降水的研究。此后,国外发达国家已经在Ka波段、Ku波段和W波段生产了不同类型的雷达。渐渐地,研究天基云遥感系统引起了人们的广泛关注。然后,这些对云完成包括形成、变化和降水的整个检测过程的发达国家发展了基于地天空的综合气象检测系统。
近几年,几家国内企业开始发展地基毫米波测云雷达系统,它的工作频段是Ka波段。然而,在天基和空基系统方面,几乎没有什么进展[2]。在2006年,安徽四创电子有限公司生产我国第一代毫米波长的雷达。这种SCRMP-01的固定站雷达模型通常是双极化的,并且工作在Ka波段。利用单发射和双接收偏振技术,得到了基于目标云的等效反射率和线性去极化率的数据参数。
为了深入了解云和雾的精细结构,四创电子有限公司在2009年开发了第二代毫米波雷达,即SCRMP-02模型雷达。这种雷达还可以用来研究降水的形成和演化的物理过程。它也是传统的双极性多普勒Ka波段雷达,这种雷达采用单发射和双接收极化技术。基本的数据参数包括目标云的等效反射率,径向速度,频谱宽度,和线性去极化率。这类雷达的性能在合肥(安徽)和杭州(浙江)进行了测试。此外,在2010,它参加了中国气象科学研究院组织(CAMS)在阳江(广东)的外场试验。在外场测试过程中,气象雷达和毫米波雷达采集的大量数据。对云和降水结构的观测模型与理论模型进行比较。
毫米波器件的快速发展及新雷达技术的应用,四创电子有限公司正在与大气探测技术中心(CMA)合作开发机载多普勒W波段雷达。这一项目被称为“云降水探测机载气象雷达系统”,是由“863计划”所支持。基于目前的技术,这将是我国第一个具有自主知识产权的机载W波段测云雷达,其整体性能有望达到甚至超过目前国际先进水平。这种雷达可以有高机动的飞行器携带,可以直接被带进实验区域。然后,它可以探测的分布和性质,甚至可以得到的云的精细结构和分布。通过这种技术,提高了云的形成和演化的检测,这填补了国内在空基测云雷达的空缺。它也正是在洞察云的微物理特性的一种新的和有效的技术,并为了空基气象雷达的发展提供了必要的技术积累。该雷达采用单发射和双接收极化技术。基本的数据参数包括:目标云的等效反射率因子、径向速度、谱宽和线性去极化率[2]。
3探测运用
SCRMP-02模型雷达是由四创电子有限公司近年来生产的多普勒雷达,下面,为了确认其性能,提供了探测运用。
3.1云的获取和频率分布
3.1.1非降雨云
(1)一片云的水平
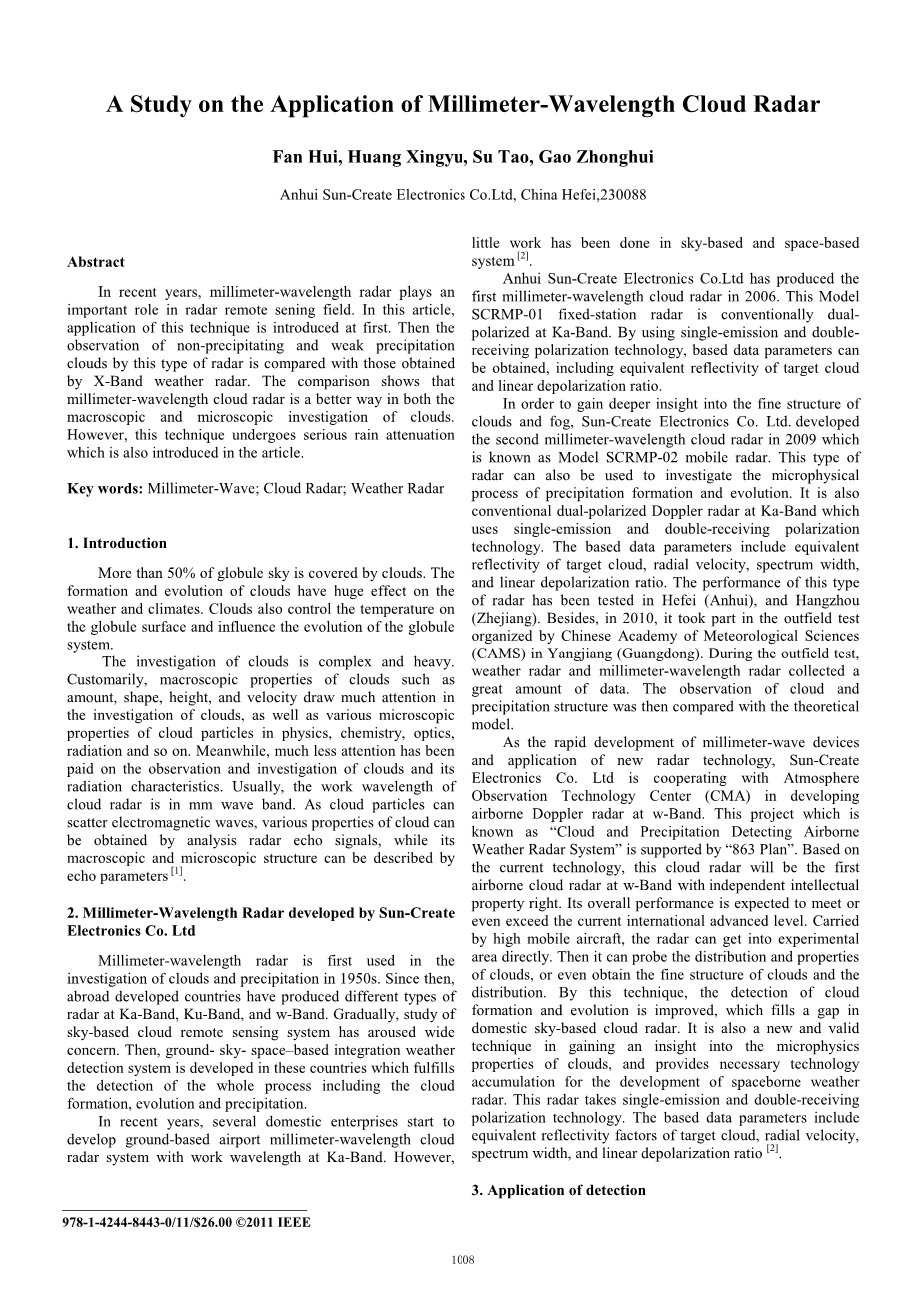
图1 非降水云强度回波(一片云的水平)
图1显示了在杭州探测到的一片非降水云的反射率因子。云底和云顶是平坦的延伸带,这显然是层状云。左边的图拍摄于2010年8月16日16:42,检测方式为RHI,方位角是。重复频率为2000Hz,和天气是晴朗的。
(2)两片云的水平
图2 非降水云强度回波(两片云的水平)
图2表明的是在降水前的非降水云的雷达回波信号。这次测试在2010年10月7日16:58杭州,天气阴霾。检测方式是RHI,方位角是,重复周期为2000Hz。在测试过程中,云的顶部和底部是同时检测。这与图1所使用的技术有很大的不同,如图所示,云的顶部和底部的结构是一致的,然而,整体结构是分层垂直的。随着高度的逐渐增大,回波强度先增大后减小。在大约3km的高度,峰值达到20dBz。正如去极化图所显示的,在高度3km处存在一个宽亮带,它的值是-8dB。因此,根据水颗粒和冰粒子各自不同的极化特性,在高度3km的是冰融化层亮带。速度谱图还表明云内存在不断增长的系统,随着云底微粒而移动。检测后不久,降水就在地面上出现。
3.1.2弱降水云
在2009年3月28日和29日期间,在安徽合肥进行了一次针对弱降水云SCRMP02雷达和X波段多普勒雷达的联合测试。由两个不同的雷达获得的结果的比较,证实了弱降水云检测性能模型SCRMP-02多普勒云雷达的优越性能。
(1)速度测量比较
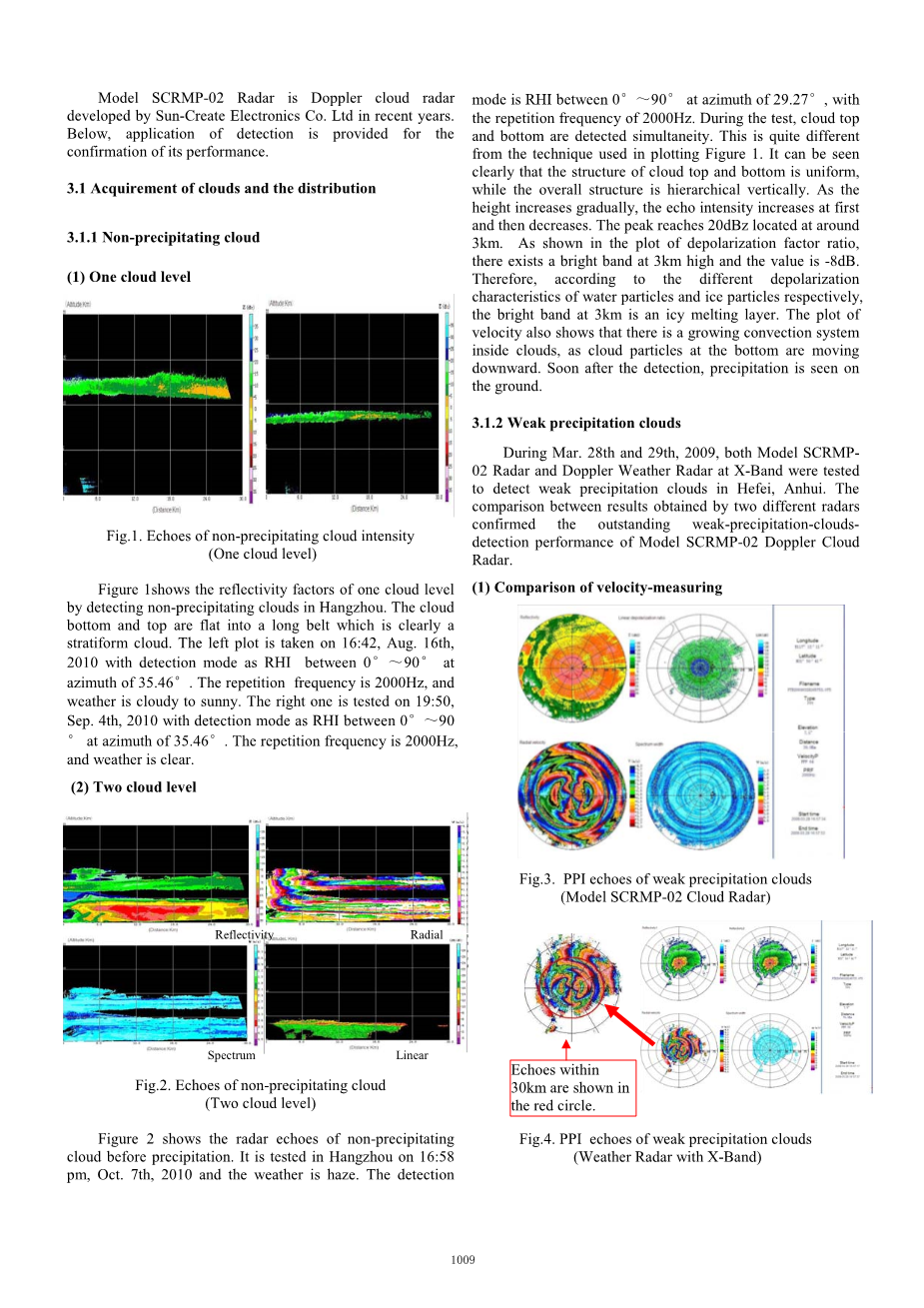
图3 弱降水云的PPI回波信号(SCRMP-02测云雷达)
图4 弱降水云的PPI回波信号(X波段天气雷达)
图3显示了弱降水云的SCRMP-02的回波信号。试验是在2009年3月28日16:57,天气状况小雨。检测模式是PPI,距离30km,仰角在,重复频率为2000Hz,速度范围。图4显示了弱降水云系的X波段多普勒天气雷达在相同条件下的回波信号。检测模式是PPI,距离75km,仰角在。除此以外,重复频率为2000Hz,速度范围为。在图4左边的红色圆圈显示在30km处X波段雷达测量的径向速度。
很明显,在图3和4中,径向速度场在距离30km出几乎是相同的,这证明了SCRMP-02在测量径向速度的优越性。
(2)高度测量的比较
图5显示了在2009年3月28日,SCRMP-02雷达观测弱降水云获得的雷达回波信号。凌晨5时天气多云,然后上午9:00变成了小雨。在中午12:00时,雨渐渐停了,天气从多云转为晴。下午15:00天气变成了多云,部分地区有小雨。我们的测试是在下午17:02在小雨中进行的。检测模式是的RHI,距离是30km,并且高度10km,重复周期是2000Hz,速度范围是。图6显示了,在2009年3月28日16:59 ,天气小雨,多普勒天气雷达对弱降水云系观测的雷达回波信号。检测模式是的RHI,并且指向北方。距离是75km,并且高度12km,重复周期是600Hz,速度范围是。此外,图6左侧的红框显示的X波段雷达在30km处获得的强度。
图5和6强度的曲线都显示了距离30km的云,其高度约6km。通过这两个数据的对比,证实了模型SCRMP-02雷达高度测量的高性能。
图5 弱降雨云的RHI回波信号(SCRMP-02测云雷达)
图6 弱降雨云的RHI回波信号(X波段天气雷达)
3.2两种类型雷达强度检测的比较
3.2.1非降雨云
图7 由VOL非降水云的回波信号的反射率因子(模型SCRMP-02雷达)
图8 由PPI非降水云的回波信号的反射率因子(X波段天气雷达)
图7显示了在2009年3月29日,由模型SCRMP-02雷达观测的非降水云的回波信号的强度。当天清晨有细雨,在凌晨两点雨停了。在早晨4:00 天气又变成雾蒙蒙的,并在上午11:00放晴。试验是在11:43天气晴朗的时候进行的。探测方式是VOL,仰角是。距离是30km,同时重复周期是2000Hz。图8显示了2009年3月29日上午11:40,X波段多普勒天气雷达对回波段信号的强度的观测。测试期间,天气晴朗,检测模式是PPI,仰角是。除此以外,距离是30km,重复周期是2000Hz。图8左侧插图表明的是X波段天气雷达对30km测量的雷达反射因子。
根据天气的演变和在测试过程中的实时天气条件,很显然没有云和降水。然而,大气中的水汽含量很高,折射率不均匀。这两个因素证明了雷达回波信号是层状清晰的回波信号。这里应该指出的是只有高分辨率的雷达可以从清晰的大气层中检测出回波信号[3]。
正如这两幅图中反射率因子的每一个细节所显示的,检测出的雷达回波信号的峰值都是一样的。得到的反射率因子是3dBz。但是,显而易见的是,X波段天气雷达在时间和空间分辨率上的性能弱于毫米波雷达。在实际的检测能力时,X波段天气雷达的最小可检测反射率因子是在10km处时-25dBz,在 20km处时 -19dBz,毫米波雷达的最小可检测反射率因子是在10km处时-41dBz,在 20km处时 -33dBz。因此,通过毫米波雷达检测弱云的性能明显高于X波段天气雷达。
3.2.2弱降雨云
图9 由PPI弱降水云的回波信号的反射率因子(模型SCRMP-02雷达)
图10 由PPI弱降水云的回波信号的反射率因子(X波段天气雷达)
图9,最初是在图5中绘制的,它显示了检测到的弱降水信号的反射因子的回波信号。相似的是,图10,开始是在图6左侧图样中显示,他表明在30km的回波信号。两幅图中的距离是30km。
根据图9和图10,显然由毫米波雷达测量的强度比用X波段测量的小。原因是毫米波雷达很容易受到测试场地中云内的降水和液态水的影响。因此,通过毫米波雷达反射率因子研究雨云微物理特性时,反射率因子回波衰减校正是必要的[4]。
4总结
毫米波雷达在雷达技术中是一项重要的应用。该技术允许更宽的多普勒带宽,可以产生明显的多普勒效应,提高多普勒分辨率和速度测量精度。使用这项技术,天线的孔径十分小。因此窄波束可以得到更好的方向,以及更高的空间分辨率[1,4]。本文所展示的SCRMP-02毫米波雷达的实际应用证实了毫米波雷达的高空间分辨率和时间分辨率,这可以更加精确地描述云的水平进而垂直结构。因此,在云的形成过程中的探测,这是一个更好的选择,尤其是移动缓慢的目标,比如低云、雾和尘埃。为了消除毫米波雷达的不足,将来注重利用该技术,对云中液态水搜索过程中的实时衰减校正问题进行了深入的研究。
参考文献
- Zhong Lingzhi, Liu Liping, Ge Runsheng. Characteristics about the Millimeter-Wavelength Radar and Its Status and Prospect in and Abroud[J]. Advances in Earth Science, 2009,(4):383-391.
- Gao Yuchun. The Research for Key Techniques of Airborne Meteorological Radar Observation System[J]. Ph.D.Thesis, Beijing University of Posts and Telecommunications, 2009.05.10.
- Hu Mingbao. Detection and Application of Weather Radar[D]. China Meteorological Press, 2007.11.
- Zhong Lingzhi. Calibration and Capability Analysis of China New Generation of Cloud Radar-HMBQ and Its Preliminary Application in Retrieving Cloud Microphysics Parameters[J]. Ph.D.Thesis, Chinese Academy of Meteorological Sciences; Nanjing University of Information Science Technology, 2009.4.01.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[29415],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

