英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
基于移动应用的蔬菜智能农业设备开发。
文摘
在传统的蔬菜生产过程中,农艺标准的落后、自动化程度低、耗时耗力、劳动密集型是主要问题。为提高蔬菜栽培智能化程度和集约化水平,减少生产资源浪费,设计了一种基于APP控制、互联网通信和图像识别技术的智能蔬菜栽培装置,具有远程控制、精准播种、液体物料定量计量和杂草识别等功能。该设备主要包括农机执行部分、图像处理部分、STM32单片机,以及发送命令和控制设备的APP,用于相应的农作工作。通过龙门定位、磁力联轴器和吸气播种工具的配合,进行了精密播种作业。通过在液体管道界面上安装PVDF压力传感器控制泵的运行时间和监测流量,定量输送液体物料。利用基于BP神经网络的CCD相机和识别算法,采集杂草图像,获取杂草位置信息。试验结果表明,播种的错误率为2.75%,植株间距的通过率为97.2%,试验中不存在播种的现象;液体输送的误差在plusmn;5.8克;真正的阳性率、真阴性率和杂草识别准确率均在95%以上。
关键词APP蔬菜STM32农用图像识别BP神经网络。
1介绍
蔬菜生产机械化是指利用机械化、智能化的手段参与作物栽培管理和收获过程[1]。与传统耕作方法相比,农艺标准具有较好的农艺水平和资源利用率高的优势,已成为农业工程领域的研究热点。目前,蔬菜生产过程主要是由农业机械和农业设施和人工工艺相结合[2-4]。它具有复杂的机械设备结构和粗糙。
农业生产方法和低智力水平的生产,并消耗人力资源和其他缺点。因此,研究蔬菜生产的智能化、自动化和集成设备的应用具有重要意义。
对于低智力和人力资源消耗的蔬菜生产过程及其他问题[5],相关人员进行了研究。在荷兰的蔬菜精密度播种生产线上,与电动汽车、人力液压手推车等处理工具一起,减少了幼苗处理的人力消耗[6];Gao等人设计了一种基于无线传感器网络的作物水分状况检测系统,全面监控作物环境因子,自动管理作物所需的湿度、温度、肥料等信息[7];Sun等人设计了一种基于物联网的工厂监控系统,通过ZigBee无线传感器网络实现了作物生长环境因子的感知,并将其传输到。用户网站,以实现用户远程监控蔬菜生长信息的功能[8]。在数据库技术的基础上,熊等人设计了一款用于茶叶质量和安全可追溯性的APP,并建立了茶叶生产的所有环节。茶生产过程中监控数据库连接到手机APP,通过手持终端APP查询茶叶生产的相关质量和安全信息[9];为了解决农业种植管理信息不方便收集的问题,以及采集设备无法满足实际应用条件的事实,秋等人开发了基于移动智能终端的农业种植管理应用[10]。
对于蔬菜农业的远程控制,智能生产和自动化管理技术的集成和创新的应用,仍然相对匮乏[11]。为实现蔬菜生产智能化和自动化养殖的目标,节约人工成本。结合机械传动、自动控制、网络通信等高科技,设计了一款基于移动应用的智能蔬菜种植设备。设备结合了精密播种,杂草识别和水和肥料管理功能,可以实现一部分的综合无线通信功能的硬件网络,实现蔬菜的种植和管理通过手持的控制指令程序,可机械化的蔬菜生产提供技术支持。
2总体设计和控制组合。
2.1整体结构设计。
智能农业装置的机械结构部分是由铝和丝杠构成的,其框架结构的角度,门框安装在土壤箱体上部,螺杆和机械臂末端执行器在XYZ三轴坐标定位运动中实现。机械臂由螺钉和铝型材组成,由轮盘和滑轮组固定在门框上,同步带驱动滑轮组驱动机械臂和末端执行器X轴运动。门户框架滑动通过拟合和六角套筒headcap螺丝,梯形螺母固定在盒子长边的墙壁,上面的门户框架通过圆板和滑轮组与滑轨连接,同步带驱动支架运动在幻灯片上,实现了机械臂和最后的遗嘱执行人Y移动;螺杆和滑块合在一起,通过与步进电机的连接,步进电机驱动螺杆。
集群计算
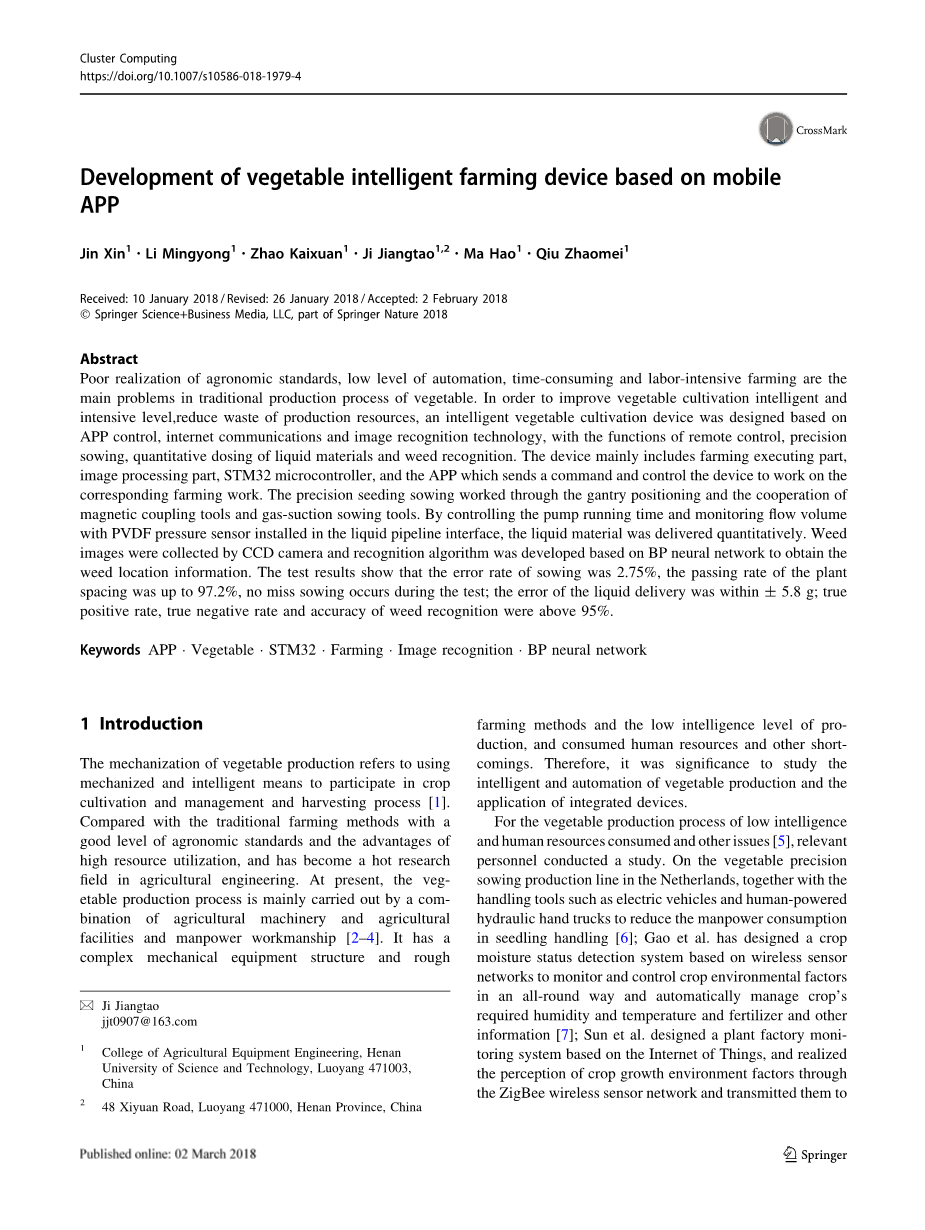
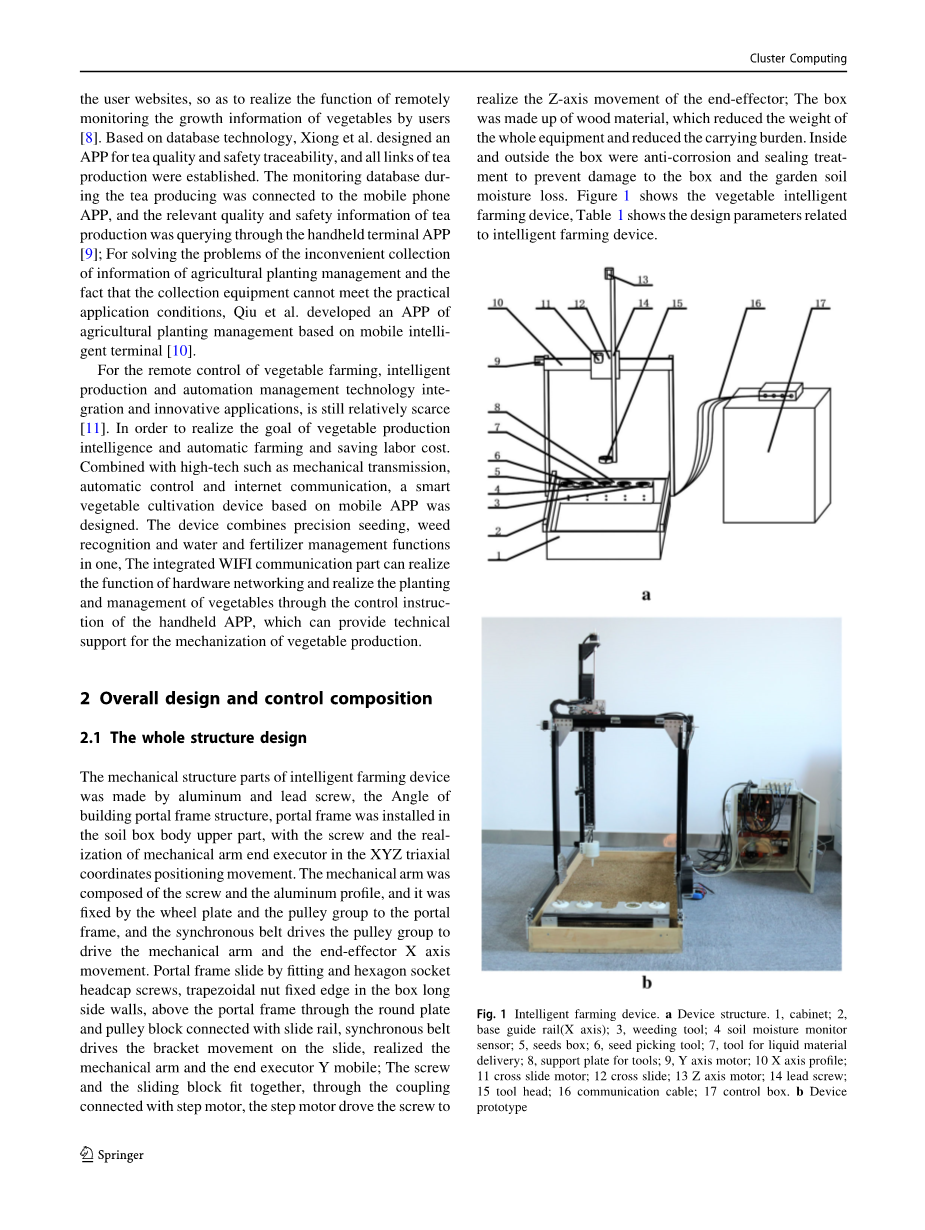
实现末端执行器的z轴运动;这个盒子是由木头材料制成的,它可以减轻整个设备的重量,减轻负重。箱内内外均采用防腐蚀和密封处理,防止损坏箱和花园土壤水分流失。图1展示了蔬菜智能农业设备,表1显示了与智能农业设备相关的设计参数。
图1智能农具。设备结构。1、内阁;2、底座导轨(X轴);3,除草工具;4土壤湿度监测传感器;5、种子箱;6、种子选择工具;7、液体物料输送工具;8、工具支撑板;9日,Y轴运动;10 X轴剖面;11个十字滑运动;12交叉幻灯片;13个Z轴运动;14导螺杆;15刀架;16通信电缆;17控制箱。b设备原型
表1智能农具。
设计参数的参数值
2.2控制系统组成和控制方法。
图2为智能种植设备控制系统整体结构,系统由养殖执行模块、传感器模块、控制器模块、互联网通信模块、图像处理模块、移动APP控制终端组成。农业行政模块包括X轴驱动电动机(开车来回龙门列),Y轴驱动电动机(开车在龙门式机械臂梁运动),Z轴驱动电动机(开车上下机械臂运动)电动机使用两阶段Leisi 42系列步进电机,具体的模型是:42 hs03-jg-b,保持转矩为0.34 N m,转动惯量是0.082公斤平方厘米。该设备包含在XYZ轴上的运动。根据龙门结构的分析,在x轴轨道上的驱动底座需要较大的扭矩,应该大于0.28 N m,在设备中选择的电机可以满足驱动装置中所有运动部件的要求;完全满足设备运动部件驱动要求;其中,由两台步进电机驱动的龙门柱,采用脉冲同步控制,保证了龙门柱运动的稳定性。传感器模块包括一个极限传感器和一个旋转编码器。将传感器安装在龙门钢轨两侧和机械臂的末端。
螺旋传动。该限位开关用于检测执行器的位置信息,并将其反馈给控制器。龙门柱机构和机械臂结构运动行程控制,实现自动复位和定位机构;旋转编码器通过联轴器与步进电机的轴连接,并对步进电机的操作步骤进行编码,并反馈给控制器的步数,控制器步进电机运行丢失的信息处理数据处理和补偿,改善控制。
农业执行部分的农业。气泵采用藤原式直流泵,工作电压DC12 V,额定功率20 W,入口和出口直径最大流量600-1200 I/H;水泵选用h12 -85型活塞泵,工作电压DC12 V,额定功率23 W,真空-85 kPa;泵通过电源适配器提供12 V开关电源,由继电器和控制器控制启动和停止状态。
美国ST微控制器STM32F103ZET6, ARM32核心,最大运行频率72 MHz, 3个12位A/D转换器,112个快速I/O端口(包括双向I/O端口),并支持USART/SPI通信协议接口[12]。传感器通过I/O口和强大的磁铁吸。采用缓冲橡胶皮垫,以防止摩擦损伤界面,同时加强气体传输通道密封,以保证吸力的稳定性。
图2智能农机控制系统结构。
在智能农机收到APP发送的播种指令后,STM32控制器控制气泵的启动和龙门机构的定位,完成对种子的定量采集和定位操作。龙门根据指示要求,龙门机构驱动运动,末端执行器定位定位。z轴电机驱动的螺杆机构驱动末端。
执行器在种子板上方移动。根据安装在z轴臂上的行程开关,获取位置信息,将信息反馈给控制器。控制器发出了一个种子指令,启动了空气泵。在种植完成后,控制器驱动龙门机构移动并将末端执行器定位到播种坑。通过安装在末端执行器气压管道上的压力传感器检测气压,确定下降情况,完成播种作业。
3.3液体材料释放装置。
液体物质释放包括水和液体肥料,它们是自动输送和播种的实现。活塞泵用于提供液体输送能力,通过橡胶管道将液体物料从物料箱输送到末端执行器(功能工具头是液体物料分配器);PVDF膜片压力传感器安装在末端执行器与橡胶管道之间的接口上,收集水压信息,并将水压信息反馈给控制器。控制器调整水泵的水压,通过对压力信息的处理来防止喷嘴堵塞;流量监测,使用定时器延迟设计,控制泵运行时间与水压监测相结合,实现定量液体物料播种。液体物料输送功能如图5所示。
3.4杂草识别单元
3.4.1图像采集方法
图像采集硬件采用CCD相机,图像传感器尺寸为0.3英寸,焦距为6毫米。CCD摄像机安装在末端执行器上方5厘米处,镜头与末端执行器平行安装,方便捕捉除草位置信息。处理器选择树莓Pi,树莓Pi包含芯片Soc,集成CPU和GPU功能,支持USB接口,I/O接口;CCD相机通过USB和Raspberry Pi连接,在杂草图像处理后,通过web服务器将杂草位置信息传输到APP中。
3.4.2杂草识别算法
BP人工神经网络可用于模式识别[18]。BP神经网络算法是根据误差反向传播算法训练的多层前馈网络,是应用最广泛的神经网络模型之一。BP网络可以用来学习和存储大量的输入-输出模型的映射关系,不需要预先揭示描述这些映射关系的数学方程。它的学习规则是采用最速下降法,在这种方法中,反向传播用于调节权值和达到最小误差平方和的网络阈值[19]。
图4 Sowing功能头部。
图5液体物料输送。
23个含有杂草和蔬菜的图像被用来训练和测试BP人工神经网络。图像分辨率为1920 91080。作物品种为紫叶甘蓝,生长周期为40-45天,杂草种类为紫菀科。每张图片都包含一株植物和一株杂草。在一个图像中,植物和杂草可能有重叠,也可能没有重叠。每个图像中的杂草区域都是手工分割以生成黄金标准。对于BP人工神经网络,有5个输入特征,分别为R、G、B、G - R、G - B值。隐层和输出层神经元的数目分别为10和2。输出模式[0 1]和[1 0]表示输入为非杂草和杂草像素。将神经网络的训练模式选择为缩放共轭梯度反向传播,有效地减少了训练过程中记忆的占用。训练目标梯度,最大训练步骤,验证值分别为10-6、1000倍和6。采用不同的训练集、验证集和测试集分别对模型进行训练和测试。在模型训练完成后,将未知图像的每个像素输入到模型中以获得杂草像素。确定了结果,得到了10值图像的形态学处理,去除了在作物上的噪声点和相似点,最终保留了最大的连通区域,这是杂草重新编码和分割的最终结果。
3.5应用程序控制实现
智能农业设备通过ESP8266 WIFI模块接入互联网,与网络服务器进行交互。智能配置模式配置智能农业设备硬件网络连接[20],主机电脑。
完成SSID和密码配置工作,继续发送UDP广播包,在监控模式下,WIFI模块接收并解析相关数据,获取SSID和密码,然后连接到路由器,实现硬件网络交互功能。
基于Android平台,开发了移动终端应用软件,使用TCP/IP协议[21]连接网络服务器。通过APP服务器与智能农业设备之间的数据交换,实现了智能农业设备的远程控制和图像监控。程序流程图如图6所示。系统启动后,手持终端搜索网络并连接到enable。
终端与智能农业设备之间的互联网通信。连接到网络后进入APP软件登录界面,如图7a所示。输入用户名和密码进入用户界面,您可以选择不同类型的蔬菜,并将其发送到后端服务器,后台服务器根据数据库存储的农作物农学需求行间距信息。如图7b所示。确定作物品种后,进入功能界面,如图7c所示。点击播种,浇水功能按钮,程序将发送指令到农业设备,同时程序根据用户需求来决定是否打开图像采集模块,并应用终端传输图像信息为用户查看智能农业设备函数来执行操作。
4试验结果与分析。
当设备硬件设计和软件设计完成时,为了验证其功能的可靠性,2017年10月在河南科技大学进行。
图6程序流程图。
技术农业设备工程学院蔬菜种植实验室功能验证试验,试验场地如图8所示。
4.1 APP远程农业测试。
以下4.4.1播种测试
Sowing试验研究植物播种功能的稳定性和精密度,试验材料:短杆秋葵;粒径4.23 mm(平均),单粒重0.01 g(平均)。应用程序发送sowing指令后,软件记录sowing距离信息,手动测量sowing距离信息,并计算出坑内的种子编号。间距与标准之间的距离在- 0.5 cm范围内。设计六组实验,每组重复36次。实验数据见表3。
从表3可以看出,株株通过率为97.2%,假阳性率为2.75%,无漏泄现象。通过对播种机实际情况的检查,发现粒径、压力和喷嘴孔径对错误率有影响,可以通过孔径和种子直径匹配播种喷嘴的设计,提高播种精度;当播种位置远离幼苗箱位置时,手臂移动的距离较长,平均速度较大(步进电机采用加速减速模式),在施放过程中会导致手臂轻微抖动,影响播撒的空间传输率。通过改变步进电机的运行方式,降低速度(加速度-均变减速),减少设备运行抖动,提高空间通过率。
4.1.2液体材料出厂试验。
液体物料输送试验采用定量喷淋法,材料为坡里高钾水溶性肥料。测试位置随机选择和材料交付质量作为饲料准确性的指标,验证液体物质传递函数的准确性。进行了6组实验。
图8实验设置。
表3播种实验数据。
测试数工厂间距合格数孔坑种子数空间通过率/%误差播种率/%。
重复次数为12次。采用大直径量杯来收集液体物料并进行称重。试验结果如图8所示。
从图9可以看出,液体材料的变化量波动很小(范围24.2 - -34.7 g),最大误差为plusmn;5.8 g(标准价值30 g),在每一个
测试组的质量变化比较大,第一次的整体质量低于正常水平,这是由于初始操作(每组第一次测试),输送管与不同体积的空气混合,导致输送分配不均。在第二组和第四组中,有明显的波动。
表4不同BP人工神经网络测试结果的比较。
数据比T:V,T
真正的阳性率/%假阳性率/%真负率/%假阴性率/%准确度/%训练步骤。
图10杂草识别和分割结果。一个原始的。b人工神经网络识别结果。c形态学处理扭转噪声。
在测试数据的中间部分。波动数据表明,所提供的材料数量较少。观察发现,在测试中,一些孔被堵塞,控制器自动调整水压以排出堵塞。这一行为导致了检测系统的检
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[22543],资料为PDF文档或Word文档,PDF文档可免费转换为Word

