英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
MEMS惯性传感器:教程概述
摘要
基于MEMS技术的惯性传感器正迅速普及到许多类型的消费电子产品中,其中包括智能手机、平板电脑、游戏机、电视遥控器、玩具甚至是最近的电动工具和穿戴式传感器。现在大多数智能手机的标准功能,是基于MEMS的运动跟踪通过允许对用户动作的响应来增强用户界面,通过提供推测室内导航和支持基于位置的服务来补充GPS接收器,并且凭借其较低的成本和小的外形尺寸,承诺在下一代手机中实现手机光学防抖。本教程提供了MEMS技术的概述,并描述了最常见的传感器机械系统的基本特征——加速度计和陀螺仪。还突出了与机械系统动力学、力和电荷转导方法相关的一些基本权衡,以及它们对处理传感器输出的混合信号系统的影响。基于能量度量的演示可以比较竞争传感器的解决方案的性能。 对于每种类型的传感器,还介绍了基础机械理论、规范传感器架构和关键设计挑战的描述。最后,本教程介绍了多传感器硅MEMS / CMOS单片集成,这些是目前推动成本和形状因子减少背后的因素。
介绍
惯性传感器技术在过去几年中迅速应用于许多消费的电子产品中,包括智能手机、平板电脑、游戏系统、电视遥控器、玩具、甚至是最近的电动工具。通过高度集成的硅微机电系统(MEMS)/互补金属氧化物半导体(CMOS)技术实现的每个感测轴的成本急剧下降,加上扩大应用运动跟踪能力以增强用户与各种设备互动的好处的意识。现在多种类型的多轴传感器利用硅MEMS / CMOS集成,可以在一个小型低成本的塑料封装中在单个硅衬底上共存。例如,普遍存在的智能手机集成了3轴陀螺仪与3轴加速度计的6轴传感器。现在,基于MEMS的运动跟踪与触摸屏和语音识别相结合是与设备进行交互的主要手段之一,传感器(加速度计、陀螺仪和罗盘)的三位一体已成为大多数智能手机和平板电脑的标准配置。
采用运动跟踪技术驱动的其他应用包括OIS和LBS。数码相机过去大多使用由石英或压电陶瓷制成的基于压电的陀螺仪,但是现在基于MEMS的硅陀螺仪正在替代较旧的技术,通过多轴集成在更小的外形尺寸下用来提供更加卓越的性能。由于现在手机相机中可用的必需的图像稳定性中,百万像素和光学变焦倍率已经达到了抑制由抖动引起的模糊,因此减少形状因数是将光学图像稳定(OIS)应用于移动手机的关键性推动因素。
与移动手机中的GPS使用相结合时,MEMS惯性传感器为完整的导航解决方案提供了互补的功能,尤其是通过使用基于MEMS传感器输出的航位推算,使GPS卫星不可见时的室内导航成为可能。从性能的角度来看,由于对噪声、偏置稳定性、漂移和热稳定性的苛刻要求,使室内定位服务(LBS)成为MEMS传感器的“圣杯”。
我们在本教程中对MEMS惯性传感器概述,是从对MEMS技术的综述开始,考虑到惯性传感器的基本机械系统:质量/弹簧系统。本教程中,我们还引入了一种用于评估传感器性能的能量度量,并探讨了其对系统优化的影响,我们详细介绍了目前消费类设备中最常见的MEMS传感器:加速度计和陀螺仪。我们将注意力集中在一个单一的低成本塑料封装中,将多个传感器集成在一起[1],本教程做了一个总结。
惯性MEMS传感器技术概述
就如名称所示,MEMS系统是依赖于小型化机电元件的基本操作,进入这种设备的设计和制造需要有各种特殊的注意事项。在本节中,我们将介绍其中的几个特殊的注意事项,首先回顾是构成MEMS惯性传感器基础的机电质量/弹簧系统。
电动质量/弹簧系统
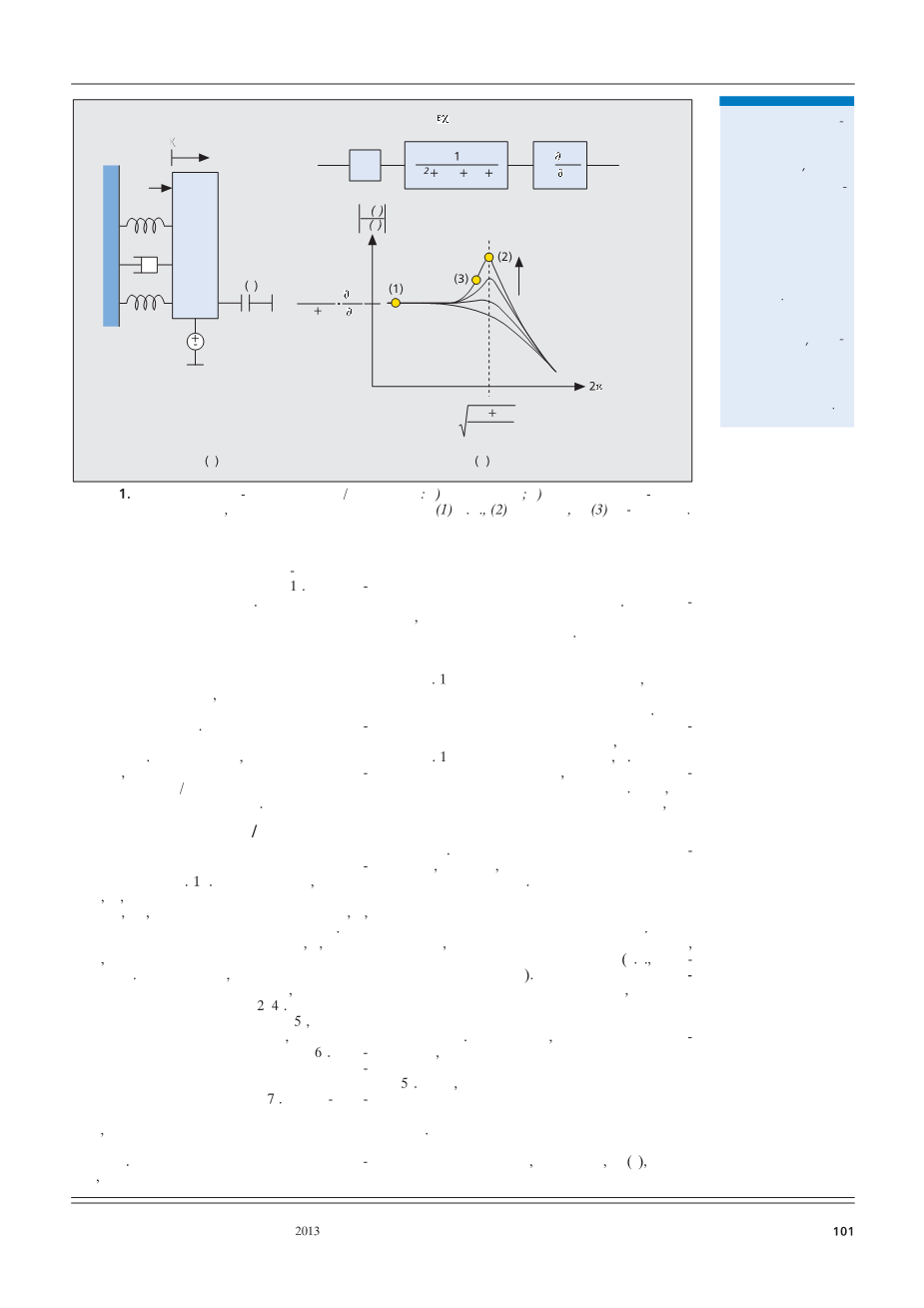
惯性传感器的基本概念可以参考图1(a)的规范系统来理解,在该系统中,通过弹簧(km)将防弹质量m悬挂在机械框架上,并且响应于表示待测量的输入力F,输入力F产生质量的位移x,并且测量位移以感测力。例如加速度计中的情况,输入力可能来自质量加速度[2-4], 或者力可能与科里奥利加速度[5]有关,由质量的角旋转引起,如振动速率陀螺仪中的情况[6], 各种传感器采用不同的传导方法将感兴趣的数量转化为作用在证明物质上的力[7]。高质量的传感器通常具有高的转导增益,同时具有抑制寄生力对质量的影响,这就可能降低传感器的精度。这种寄生力随着施加的变化而变化,但是这种变化通常可以包括由包装或热膨胀引起的应力以及由除了要被感测的类型以外的类型的运动而作用在检验质量上的力。例如,角速度陀螺仪应该排除由于线性加速度引起的力,排除不想要的力的作用而导致弹簧和有质量物块比图1(a)所示的更复杂的布置的实际实现,但是传感器对所需力的响应通过该基本系统非常好地建模。
图1 仪器机电质量/弹簧系统
验证质量也受到与其速度成比例的阻尼力,如图1(a)中由阻尼系数b表示,阻尼结果的来源来自许多方面,但是对于惯性传感器来说,通常主要的是空气阻尼,因此,如果传感器需要高品质因素,则密封机械元件以使得传感器在低压下运行是重要的,密封也可防止污染物、颗粒和湿气干扰传感器的操作。
作用在检测质量上的附加力涉及提供可操作传感器所需的机电转导,在本教程中,我们主要管制的是静电转导,尽管其他方法也是可能的(例如,压电转导)。所有传感器都需要检测质量位移,但是一些传感器另外要求质量被驱动以产生必要的输入力,例如,在振动速率陀螺仪中,角旋转产生的科里奥利力与证明质量速度成比例[5],因此,对于给定的旋转速度,证明质量必须以已知的速度移动,以将其自身表现为作用于质量的已知力。
为了通过静电方式感测证明物质的位移,使用电容器,其中一个端子位于质量块上,另一个端子位于固定框架上。使用固定的偏置电压,电荷变换,在电容器上由位置创建,得到
(1)
可以注意到关于的位置的一阶导数与偏置电压一起确定电荷灵敏度,电荷灵敏度可以进一步用电容器的几何参数和自由空间的介电常数表示。表1提供了两个常见的电容器几何结构:平行板和梳齿。观察到的一个关键点是,对于较大的偏置电压和较小的初始间隙大小,电荷灵敏度通常会增加。
除了提供电荷转换外,还可以使用电容器将静电力施加到检测质量块,静电力与存储在电容器上的电荷的势能的梯度有关。
使用固定偏置,并假设在小信号的工作条件下,功率变化与电容器端子的电压变化有关,如下所示:
(2)
在电荷转导的情况下,我们看到相对于位置的一阶导数决定了与偏置电压一起的力,在表1中,平行板和梳形电容器的力也根据电容器几何参数和自由空间的介电常数,力传导对于需要将检测质量驱动到已知运动(如振动速率陀螺仪)或评估由寄生电场引起的力的传感器是重要的。
表1 两个普通电容器的电荷转换和力转换和静电弹簧常数类型
|
电容 |
电荷转导 |
力传导 |
弹簧常数 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
虽然没有明确地用于力传导,但感测电容仍然与静电力相关联,对于平行板电容器来讲是随着检测质量位置而变化。对于小位移,这种静电力对系统动力学的影响可以通过图1和表1中的表示的等效弹簧常数来进行建模。然而,由于静电力在本质上是具有吸引力的,所以静电弹簧常数实际上是负的,导致称为静电弹簧软化的现象,其中静电力降低了系统的有效弹簧常数,如果静电弹簧常数kE的大小允许超过机械弹簧常数的大小,则这种弹簧软化可导致完全的机械不稳定性,称为拉入。梳状电容器不会受到这个问题的影响,因为静电力与第一级不相关,要注意表1中列出的弹簧常数的强大的间隙和偏置依赖性,因为这些参数在制造过程和温度上的变化会严重影响传感器,可能需要修整或温度补偿进行校正。
图1a的机电系统是二阶动力系统,频域输出电荷与传感器输入信号相关,如图1b所示,其中给传感器输入信号的转导力作用在检验质量上(根据每种类型的传感器而变化),机械动力学将位置变化与施加的力相关联,考虑机械和静电弹簧两者,并且电荷转导给出了从位置到输出电荷的转换。
如图1b所示,可以根据检测质量、弹簧常数、阻尼系数、偏置电压和电容灵敏度的选择来实现传感器传递函数的范围,人们还可以设想出可能感兴趣的三种可能的操作条件:
bull;在D.C.附近的操作
bull;谐振操作
bull;操作非共振
以下部分将考虑适用于每种传感器类型的操作条件。
传感器界面能量度量
所有MEMS传感器都需要专用的模拟/混合信号电路来处理和数字化原始传感器输出,在传感器接口提供的许多功能中,向MEMS器件提供稳定的电压偏置,将信号电荷的流量放大到可测量的电平,同时最大化信噪比(SNR),提供必要的信号处理以过滤和 提取所需的信号,并使传感器的性能稳定在温度上。
通过将峰值SNR(表示为功率比)与每转换的能量的比率来找到有用的基于能量的品质因数(FOM)。 更高的FOM表示对于给定的噪声性能,更低能量的传感器可操作在较低的功率消耗,或者替代地,具有相同功率消耗的较低噪声运算。
图2 传感器接口方法:(a)连续时间; (b)离散时间
例如,考虑图2所示的简化的传感器接口配置。第一种配置使用连续时间检测,其中将固定的偏置电压施加到MEMS检测质量块,并且质量的运动引起电荷流动, 然后在模数转换(A / D)转换之前由转换放大器放大。该系统由随后的数字滤波器限幅,以提供所需的输出,第二种配置使用离散时间检测,其中在转码放大器被复位之后,证明质量由电压阶跃驱动,然后将得到的电压数字化并滤波以产生输出信号,在两个系统中,放大器相对于其跨导引入热噪声,更高的放大器跨导将产生等效输入噪声电压。
对这些系统的FOM的分析产生以下表达式,其中假设平行板电容感测:
分析假设噪声性能受到前端电子设备的限制,而不是MEMS器件的布朗噪声。 根据术语,可以确定优化性能的一些基本传感器设计目标:
bull;最大限度地实现机械满量程摆幅( / ):在其全尺寸摆动下工作的MEMS器件应提供最大的机械位移,作为间隙的一部分,由于感测电容器的间隙依赖性,实际位移受到非线性的限制。
bull;最大化偏置或驱动电压():作为电源电压百分比的较大偏置电压(连续时间系统)或驱动电压(离散时间系统)将产生较大的输出信号和改善的SNR,因此,通常使用超过的高偏置/驱动电压。
bull;最小化寄生效应():附加寄生电容的存在通过放大器电压噪声的转换产生额外的噪声电荷,因此,增加的寄生效应降低SNR。
电容寄生效应的影响值得特别关注,许多MEMS技术依赖于系统级封装(SiP)集成,其中机械器件和传感器接口电子器件驻留在必须通过接合线连接的不同管芯上[8]。键线寄生效应可能相当大,寄生效应的任何变化都会产生相对较大的偏移偏移,键线互连也不允许敏感传感器输出线屏蔽,相比之下,提供单芯片集成的MEMS技术消除了对接合线的需求,并为机械设备和传感器接口电子器件之间的高密度、屏蔽、稳定的互连提供了便利[1]。
如上所述,基于能量的FOM可以分析应用于探索针对传感器接口架构的基本权衡,它也可以经验地应用于提供不同传感器比较的基础,例如,图3显示了可从InvenSense和其他供应商获得的几个三轴陀螺仪的比较,相对于满量程的RMS噪声(以百万分之几表示)相对于每轴每转换的能量绘制,趋势线代表固定能量级FOM,消费级陀螺仪的最先进的性能目前在每轴上约为20 dB / pJ。
图3 三轴陀螺仪的RMS噪声与能量/转换/轴的关系
惯性MEMS传感器的应用
上一节中概述的因素对于确定基本传感器性能极限至关重要,当然,在实际的传感器系统的全面实现中还有许多其他的考虑。例如,连续时间感测或离散时间感测是否最适用可能取决于传感器的类型和关于将传感器输入转换为施加的力的细节,加速度计使用比较简单的系统来驱动MEMS,而陀螺仪需要显着的复杂性来保持自振荡并调节驱动运动的机械振幅。本节将介绍诸如这些特定于每种传感器类型的注意事项,对于消费者应用,最流行的MEMS传感器是加速度计和陀螺仪,我们现在更详细地考虑这些。
加速度计
MEMS加速度计测量加速度,通常以千(g)为单位,其中1g是由于地球重力在9.8 m / s2的加速度,因此,多轴加速度计可以直接测量重力方向,但它们也会因运动而对线性加速度作出响应,它们是比较基本的机电系统,至少在原理上,图4示出了简单的加速度计系统,其示出了核心传感器的机电原理图,等效系统模型和接口电路的简化示意图。如图4a所示,加速度计包括通过弹簧悬挂在固定框架上的质量,其中施加的力由于质量的线性加速而产生,加速度可以通过传感器的运动或重力产生。事实上,重力感应是移动设备中加速度计的一个普遍应用,广泛用于屏幕定位,游戏和罗盘倾斜补偿。
图4b示出了等效的系统视图,清楚地表明,通过质量本身发生作用在证明质量上的强制加速度的转变,这是直接来自牛顿第二定律:,质量越大,对应给定加速度的力越大,由于重力感应加速度需要进行直流测量,因此加速度计通常远离机械共振。DC的机械灵敏度与成正比,这是固有频率的反平方,典型的消费级加速度计具有在低千赫赫兹范围内的固有频率,所以在DC处发生几十纳米的机械位移,用于1g加速,对于给定的灵敏度,最大限度地提高质量和弹簧刚度是有用的,以帮助区分由于诸如热应力的其他因素引起的加速度和寄生力的力。
图4c示出了加速度计传感器接口的简化示意图,通常情况下感测电容被配置为全桥
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141917],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

