
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
制动过程中汽车制动器对其稳定性的影响
摘要:本文分析了轿车在制动过程中的稳定性。在汽车理论中,稳定性被认为是车辆在没有驾驶员对车辆进行任何控制动作的情况下,遵循既定轨迹行驶的能力。在本文中,讨论了汽车的结构元件(例如防抱死制动系统和制动力调节器)的重要性及其技术条件和用于制动时,轮间差速器的稳定性。文中,通过分析公式与图形依赖性来描述汽车在上述情况中运动模式。本文对此提供了结论和建议。
关键词:车辆,制动,稳定性,制动力调节器,ABS,微分
1.介绍
稳定性是操作设备,系统或现象保持自己的参数的能力。车辆的运动的稳定性被理解为其在没有驾驶员的对车辆做任何控制动作的情况下,遵循设定轨迹行驶的能力。在下文中,提供了可用于描述车辆的运动的一些主要定义。
轨迹是显示出车辆移动路径的线。基于轨迹的控制是在保持或改变其运动的轨迹时对车辆的控制。基于轨迹的失去稳定性通常通过展现车辆与技术路线规则KTR 1.01:2008 [1]的车道宽度的设定通道的偏差的值来评估。
运动方向–由速度矢量描述的车辆的运动方向。基于运动方向的控制是关于纵向轴线的车辆控制。通过所选择的路线与车辆的实际运动的纵向轴线之间的角度来评估与所选择的路线的偏离程度。上述角度越小,基于运动方向的稳定性越好。
制动距离Sst是车辆在其制动时所行驶的距离。推动制动踏板的时刻被认为是制动的开始。停止距离S0是制动距离加上驾驶员反应t1期间汽车所行驶的距离。
制动模式包括极端制动,即在达到最大可能速度时的制动(目的:尽可能快地停止车辆);紧急制动,即和极端制动相似,但尽力避免交通事故;行车制动,即以低加速度a(在这种情况下,a lt;3m / s2)制动。
汽车在其制动上的不稳定性的原因可以包括不同制动力影响左轮和右轮,轮胎与道路表面的不同附着系数,外力(包括驾驶员的控制动作)和抱死的车轮。
上述的一些因素是由车辆的制动系统的结构预先确定。
在本文中,讨论了汽车制动系统的结构对制动稳定性的影响。
2.其制动的汽车运动的理论的依赖,并失去其稳定性的原因
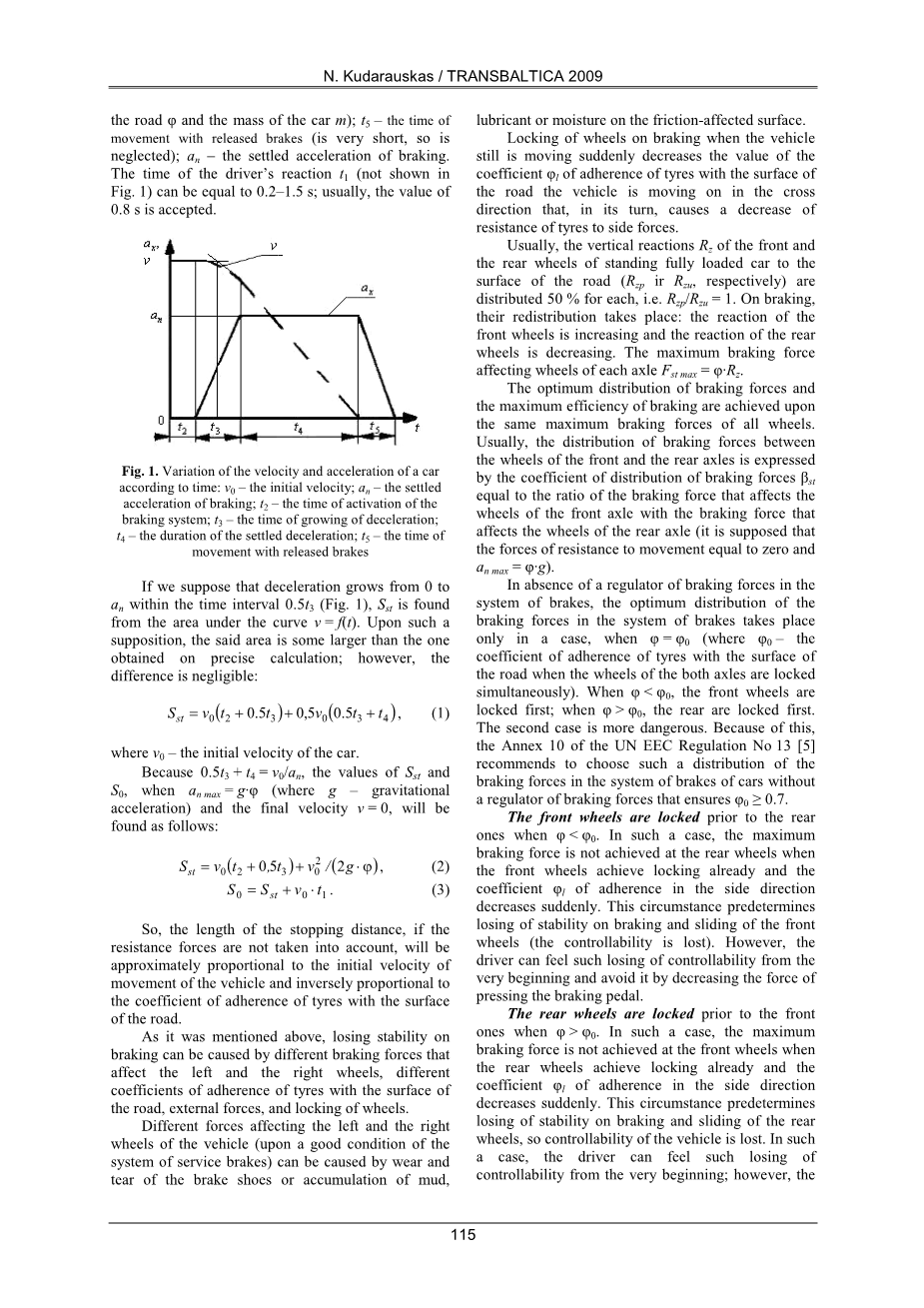
在检查汽车的制动动作时,不用任何阻力就可以使用时间a = f(t)[2-4](图1)的制动加速度的理论的关系。 在图中,t2是制动机构启动时刻与汽车制动时刻之间的时间间隔(液压制动器t2 = 0.05~0.1s); t 3是制动加速度的增长时间大约等于0.05~0.6s(与道路表面与轮胎的附着系数和车辆质量的质量m成正比); t 5 -松开制动踏板的运动时间(非常短,因此被忽略); an -制动的稳定加速度。驾驶员的反应时间t 1(图1中未示出)可以等于0.2~1.5秒; 通常选用的值为0.8s
图.1. 汽车的速度和加速度随时间的变化
v 0 -初始速度; an -定居制动加速度 t2 -激活的时间制动系统; t3 -减速时间长;t4 -稳定减速的持续时间; t 5 -松开刹车后的时间
如果我们假设减速度在0.5 t 3(图1)的时间间隔内从0增加到an,则从曲线v = f(t)下方的区域中可以看到S st。在这样的假设下,所述的区域比通过精确计算所得到的区域要大一些; 然而,这些差异可以忽略不计:
Sst=v0(t2 0.5t3) 0.5v0(0.5t3 t4), (1)
其中v0-汽车的初速度
因为0.5t 3 t 4 = v 0 / a n,当anmax = g·phi;(其中g-重力加速度)和末速度v = 0时,S st和S0的值将被发现有如下关系:
S st= v 0(t 2 0.5t3 ) v 02/(2 g·phi;) (2)
S0=Sst v0·t1 . (3)
因此,如果不考虑阻力,则停止距离的长度将大致与车辆的初始运动速度成一定比例,并且与轮胎与道路表面的附着系数成反比。
如上所述,制动失去的稳定性可能由不同大小的制动力影响左右车轮、轮胎与道路表面的附着系数,外力和车轮锁定引起。
影响车辆左右车轮的不同力(在制动系统的良好状态下)可能是由于制动蹄的磨损或摩擦表面上泥土,润滑剂或水分的积累引起的。
当车辆在行驶途中的制动引起的抱死会降低了车辆在交叉方向行驶的轮胎与道路表面的附着系数phi;l,而这反过来会导致轮胎对侧向力的抵抗降低。
通常,站立满载汽车的前,后轮到道路表面(分别为R zp 和R zu)的垂直方向的力R z分别为50%,即R zp / Rzu = 1。制动时,它们的会出现再分配:前轮的垂直方向的力增加,后轮的垂直方向的力减小。影响每个车轮的最大制动力F st max =phi;·Rz。
制动力的最佳分配和制动的最大效率是在所有车轮的最大制动力相同的情况下实现的。通常,前后车轮之间的制动力分配由制动力分配系数用beta;st表示,它也等于前桥车轮的制动力与后桥车轮的制动力之比(假定行驶阻力为零,anmax=phi;·g)。
在制动系统中没有制动力的调节器的情况下,制动系统中制动力的最佳分配只发生在phi;=phi;0(其中phi;0-两轴汽车前后轮同时抱死时的轮胎与道路表面的附着系数)的情况下。当phi;lt;phi;0时,出现前轮首先抱死; 当phi;gt;phi;0时,出现后论首先抱死的情况。而第二种情况更加危险。因此,联合国EEC规则第13号[5]附件10建议在没有制动力调节器时,汽车制动系统中选择制动力分配应该确保phi;0ge;0.7。
当phi;lt;phi;0时,前轮将先于后轮抱死。在这种情况下,当前轮已经开始抱死时,在后轮处没有出现最大制动力,并且侧向附着系数phi;l会突然减小。这种情况预先决定了前轮的制动和滑动的稳定性的丧失(被称为可控性丧失)。然而,司机可能从一开始就会感觉到这种失控的可控性,并且通过减小按压制动踏板的力来避免这种情况的发生。
当phi;gt;phi;0时,后轮首先出现抱死。出现了这种情况时,当后轮已经开始抱死时,在前轮处还没有出现最大制动力,并且会导致侧向附着系数phi;l突然减小的状况。这种情况预先决定了后轮的制动和滑动的稳定性的丧失,因此车辆的可控性将丧失。在这种情况下,司机可能从刚开始就感觉到这种失控的可控性; 然而,驾驶员却不能通过减小按压制动踏板的力来避免这种情况。 因此,后轮的抱死被认为比前轮的抱死更加危险。
3.制动系统结构对车辆制动稳定性的影响
对于配备有制动力调节器的车辆,常常推荐使用相当小的phi;0值。例如,对于满载的五座车辆,l 1 / L = 0.5,h / L = 0.37(L -汽车的长度; l1-重心与前桥之间的距离;h-重心到路面的距离)。 在这种情况下,phi;0 = 0.42,beta;st = 1.275。如果汽车的负载为20%(带司机的汽车),则这些参数为phi;0 = 0.22,beta;st = 1.34。对于实际的车辆:
Fst1=C1(p1- p1)与Fst2=C2(p2- p2), (4)
其中C 1和C 2 -结构相关常数,p1和p2-与复位弹簧的力成比例的压力。
另外,对于没有制动力调节器的车辆,p2 = p1
在图 2,展示出了理想的关系p2 = f(p1)(虚线)。 在这种情况下,当p2和p 1对phi;的关系是非线性的并且考虑到车辆的负载不同时,可以有最大制动力。
图 2,制动力的最佳分配
制动力的动态调节器根据按压制动踏板的力和后轮的垂直反作用力来改变压力p 2。 这种调节器依赖于p1(断曲线0-a-c和0-b-d)来调节p 2。
在下文中,讨论了这种调节器的方案和操作原理。 其活塞1(图3)和阀2固定在车身上。通过具有调节螺钉3的杠杆4,活塞将会受到5个扭力F的影响。 扭力的另一端通过杆6和7与汽车的后桥连接。 活塞也受到弹簧8的力F sp的影响。
图3. 制动力调节器的方案
1 -活塞; 2-阀门; 3-调节螺丝; 4-杠杆;5-扭转; 6,7-杆; 8 -弹簧; p-压力; F-力; R-道路对车轮施加的力
用于调节压力p 2的系统取决于压力p 1,由悬架f的偏转表示的反力Rzu由三个要素组成:车辆的后悬架-扭矩-调节器。调节器的控制方程如下:
p2=p1,if p1le;p2
p2=[Ftor Fsp p1(A2-A1)]/A2,if p1>p0, (5)
其中F tor -扭矩的力,F sp -弹簧的力,A 1和A 2分别是车轮制动缸中的活塞表面和制动力调节器中的面积。
车辆的静态平衡和后悬架的平衡的线性方程式将如下:
Rzu = [m·g·l1-h(Fst p Fst u )] L ;
Rzu= Rzu0 cp(f-f0). (6)
其中f -悬架的挠度,c p-悬架的刚度系数。
在(5)和(6)的进行某些数学运算之后,当p 1gt; p 0时,找到相关性p 2 = k·p 1 b(其中k和b是实数)。 这个方程是a-c和b-d段的直线方程(图2)。
为了评估调节器的运行效率,可以使用重量利用系数mc:考虑到车辆的总质量,它显示了使用具有制动力调节器的制动系统的制动力的次数较少与制动力的最佳分布相比较。 在这种情况下,我们发现:
(7)
在图4所示,显示了所述系数对附着系数的关系(点曲线-有动态调节器的情况,连续曲线- 没有动态调节器的情况,粗体曲线-100%负载,薄曲线-20%负载)。如图4所示,制动力的调节器大大增加系数m c,后者的值接近1; 然而,这种现象仅发生在phi;gt;phi;0(phi;*值符合点c和d,图4)的区域中。 然而,即使在phi;lt;phi;0时,使用制动力调节器也是较为理想的,因为它与没有制动力调节器的制动系统相比,phi;0变为约1.5倍。
图.4. 重量利用系数mc与轮胎表面附着系数phi;的关系
值得注意的是,制动力的调节器是一个相当简单的机构,它没有任何的电子部件,泵,油箱等等。它可以安装在任何制动系统中,例如具有一个,两个或更多轮廓的液压或气动制动系统中。在维修制动的情况下,具有和不具有制动力调节器的车辆在其制动性能方面是具有相同的值。在极端制动的情况下,除了没有制动力调节器的车辆的phi;0之外,具有制动力调节器的车辆的制动距离小于没有制动力调节器的车辆的制动
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[138445],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、外文翻译、任务书、文献综述、开题报告、程序设计、图纸设计等资料可联系客服协助查找。

